塔式起重機群機防碰撞設計
2017-02-25 08:09:47清鄧建宇李
中國特種設備安全 2017年1期
肖 清鄧建宇李 豐
(1.江西理工大學應用科學學院 贛州 341000)
(2.贛州市建設工程安全監督管理站 贛州 341000)
塔式起重機群機防碰撞設計
肖 清1鄧建宇2李 豐1
(1.江西理工大學應用科學學院 贛州 341000)
(2.贛州市建設工程安全監督管理站 贛州 341000)
塔式起重機多應用于建筑行業,一個區域內多臺塔式起重機工作時,相互靠近的塔式起重機容易發生碰撞事故。本設計是基于2.4G頻率的ZIGBEE通訊模塊組網通訊,抗干擾性強,可配置通道號以區別不同的通訊組,通過其實現設備動態的接入,可完成局域范圍內的數據交換,滿足有限距離的通訊,從而滿足局域塔式起重機防碰撞的需要。塔式起重機群機防碰撞系統,經實際檢驗,系統工作可靠,可廣泛應用于工業、農業、交通、物流、電力、水利、環保等行業的塔式起重機防碰撞控制。
群機防碰撞 力矩限制器 Zigbee 物聯網
塔式起重機作業可能存在的碰撞隱患,如單臺塔式起重機與其他物體的碰撞隱患——塔式起重機吊繩與物體、吊鉤與過往車輛、吊物與公共區域的碰撞;塔式起重機群作業時存在相互碰撞可能性。因此,塔式起重機群作業時需要使用塔式起重機安全監控系統,防止塔機之間以及塔機與其它物體之間的碰撞,并且防止塔機吊重物進入禁行、禁吊區域。對所有碰撞可能的危險和非法入侵提供實時預警、現場管理、遠程監控、視頻監控、無線傳輸等多種信息的智能測控,是一種非常有實用價值的安全防護監控設備,并逐漸廣泛應用于建筑業施工起重機械。
由C8051F580單片機控制整個安全操作系統,其自動檢測起重機所吊載物體重量質量、起重大臂所處的水平面角度,并能將額定載重量、實際載荷、垂直塔身的傾斜角度、大臂工作半徑、起重臂垂直面所處的角度。實時監控檢測起重機工況,具有設備自診斷功能,快速危險狀況預警、報警及安全控制。具備黑匣子功能,自動記錄作業時的實時工況,為事前分析、事中監管、事后追責提供依據。
市場上現有的塔式起重機防碰撞系統大多基于PC104主板、數據采集卡、DTU模塊、ZIGBEE外置模塊等硬件搭建的系統,這樣的設計雖然在硬件設計上便捷,但是總體的體積較大、成本增加,并且有些不能做到單機本身自帶群機防碰撞功能,即需要額外的主機專門作為防碰撞使用。
本設計基于ZIGBEE與GPRS聯網的物聯網絡終端的塔機防碰撞設計,將GPRS模塊、ZIGBEE模塊集成到系統主板上,集成度高度增加,融力矩限制與群機防碰撞于一體,通過ZIGBEE模塊組成MESH網絡,設備動態加入,參數可通過遠程設定、并可遠程診斷系統本身的故障,其可廣泛應用于需要加強塔式起重機安全監控的場合。
1 系統總體方案設計
塔式起重機群智能防碰撞安全防護系統由塔式起重機防碰撞安全系統(也即塔機力矩限制器終端設備)和塔式起重機群遠程監控系統(后臺系統)兩部分組成。塔機智能安全防護系統主要有防碰撞報警、限位報警、禁行區、禁吊區防護、制動控制、運行狀態實時監控、運行過程記錄、歷史運行狀態查詢、碰撞事故黑匣子記憶等功能。
塔式起重機群防碰撞報警系統由報警控制器、角度傳感器、幅度傳感器、高度傳感器、無線通信控制器等組成。報警控制器用于塔式起重機碰撞危險的實時報警,報警形式:聲音警示,顯示屏圖文并行警示;報警范圍:碰撞危險預警報警、超限位報警、超力矩報警、超重報警、傾角報警、風速報警、禁行區及禁吊區報警。幅度傳感器:感知塔式起重機小車距標準節的距離,精度:0.10m;角度傳感器:感知塔式起重機吊臂的角度,精度:0.3°;高度傳感器:感知吊鉤高度,精度:0.10m;傾角傳感器:檢測塔身傾斜角度,精度0.01°;風速傳感器:檢測風速;無線通信:用于塔式起重機與塔式起重機之間,塔式起重機與遠程監控器數據通訊的無線傳感器網絡設備。有效距離:1.5km;頻點范圍:2.4GHz。系統功能結構圖如圖1所示。
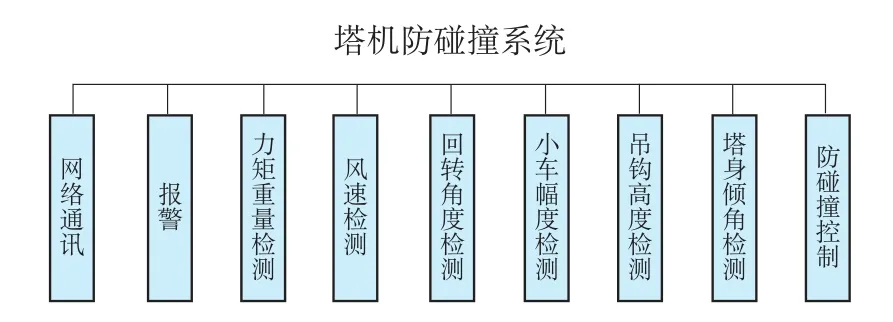
圖1 塔機防碰撞系統功能結構圖
2 終端硬件設計
系統硬件核心控制器主要為C8 0 5 1 F 5 8 0,人機交互由貼膜鍵盤、8.0TFT顯示器(像素點800×600)、報警蜂鳴器組成,硬件系統的電路計主要包括C8051F580主模塊電路、局域組網ZIGBEE通訊模塊、開關電源模塊、I/O擴展模塊和人機交互模塊。C8051F580主模塊電路包含UART串口通訊電路、信號濾波及跟隨電路、傳感器接口電路等。
塔式起重機涉及起重安全,系統穩定性要求高,特別是塔式起重機電機啟停頻繁,對監控系統的干擾特別大尤其是對系統終端的電源沖擊。為保證系統穩定,在電源側設計了共模磁環抗干擾電路過濾共模的電磁干擾信號、安規電容保護電路,如圖2所示。
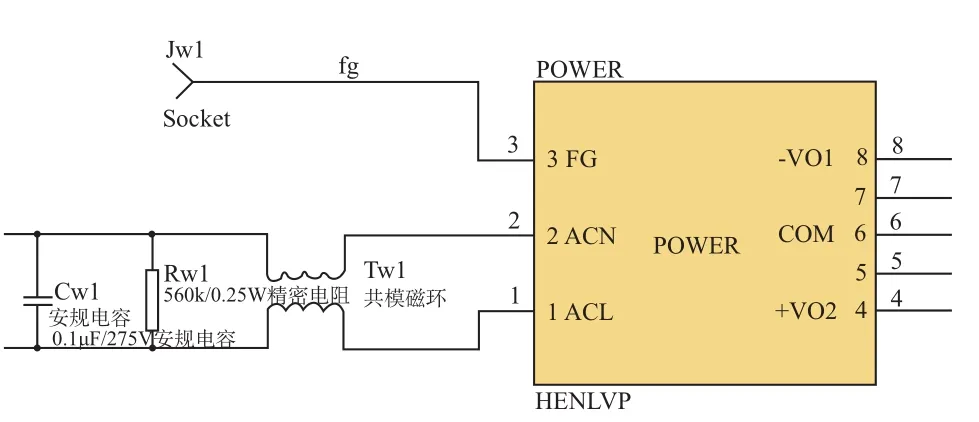
圖2 抗干擾及保護電路
幅度、角度、高度等傳感器輸出為0~5V標準信號,其接入電路如圖3所示,輸入端設有濾波電容,濾除干擾信號。
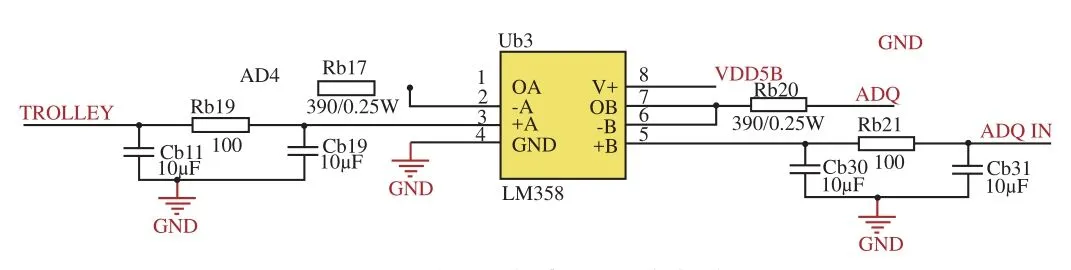
圖3 信號濾波及跟隨電路
為保證塔機防碰撞的可靠性,獨立采用了一片C8051F340作為從機用于塔機群的組網通訊,獲取的相關數據再與主單片機通訊。
3 系統功能
塔機力矩限制器終端設備和數據庫及平臺無縫融合,實現了實時、開放、多源數據的監控,在對塔式起重機實現力矩、載重、角度、風速等關鍵參數進行監控、記錄和聲光報警;可根據客戶需要定制手機短信通知功能,向相關人員進行短信報警,使得塔機安全監控成為開放的、實時動態、可溯源的監控。
實現了塔式起重機聯網及起重設備工況安全的實時在線監測,從技術手段保障了監管部門、使用者對塔機使用過程和行為的實時監控,真正將控制設備運行過程中的危險因素和安全隱患落到實處,切實有效的防范塔式起重機安全生產事故發生。
塔式起重機集群智能防碰撞安全防護系統集成全方位安全監控功能:終端設備上的各臺塔機的參數設置;載重、幅度、力矩、傾角、風速等信號采集;閾值設置及預警、報警;控制輸出;單機防碰撞;塔式起重機集群防撞;運行數據終端設備存儲和遠程下載;數據報表功能;短信通知;塔機違規管理;租賃商管理權限(遠程加鎖、解鎖);設備定位;多級別監控授權。
4 塔式起重機參數設定
群塔防碰撞需要設定群塔在區域的參數,見表1。
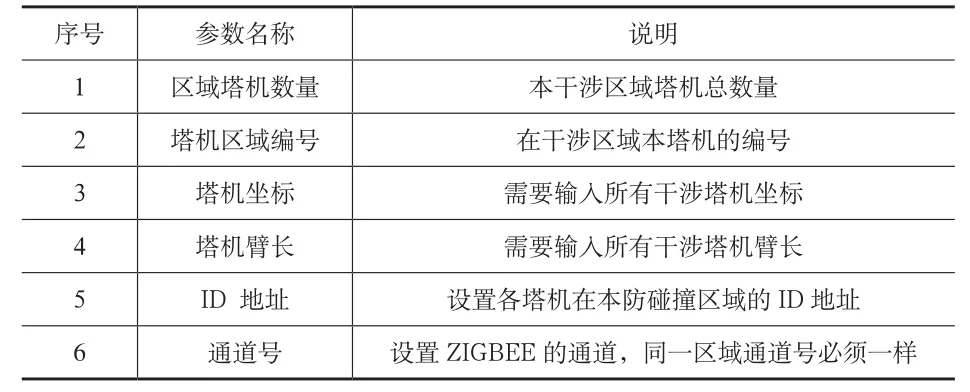
表1 參數設定列表
通過系統終端人機界面設置表1中的參數。
5 無線傳感網絡節點的動態加入與局域數據交換
每一個塔式起重機防碰撞設備都將傳感器檢測、無線通信、計算能力集成在終端,也即成為一個無線傳感網絡節點。每個終端節點采用動態方式加入和退出,防碰撞區域的設備能通過競爭獲得主機控制權,即便同時開機或者現有成為主機的設備關機退出了,所有其它節點的設備亦能正常工作。
各節點控制器將檢測載重、角度、幅度等變量,并將數據上傳給本防碰撞區域的主機,主機再將數據統一發給各從機,局域間的通信通過2.4G無線傳輸模塊(ZIGBEE)交換數據。主機作為主控節點完成局域無線信號收發控制,并對信號進行必要的轉換和預處理。現場無線數據采集節點可以有多個。防碰撞系統參數可由一臺終端設定并將參數發給本群組的其它設備,無需到每臺終端上去設置。每臺終端既能獨立地完成數據采集和控制,又可將數據傳送到現場主機。
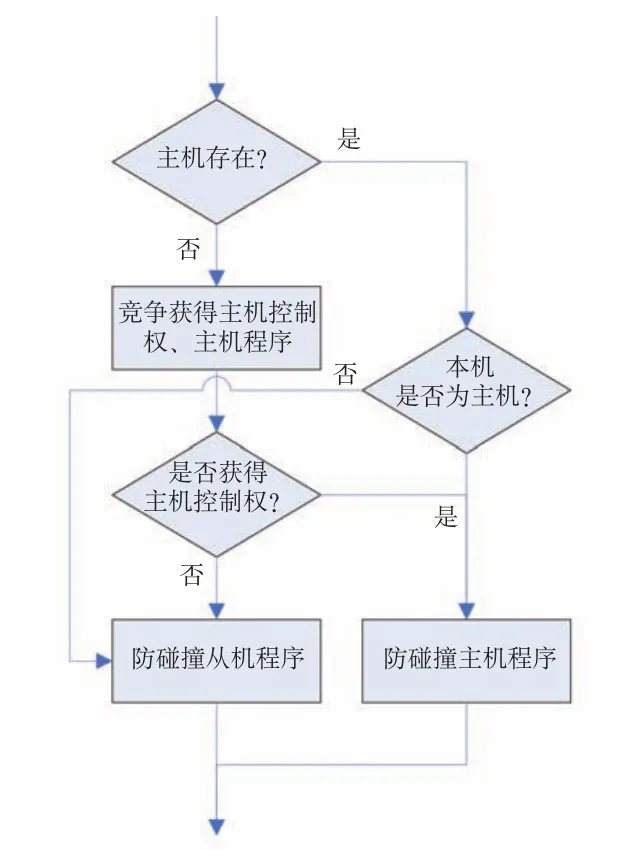
圖4 動態節點加入流程圖
6 防碰撞算法
在本塔機進行防碰撞判斷之前,先由微處理器模塊通過幅度傳感器和角度傳感器獲取本塔機信息,從而計算出本塔機的大臂末端坐標和小車坐標,再通過ZIGBEE無線通信獲取干涉塔機的大臂末端坐標、回轉中心坐標、干涉塔機的大臂長,然后進行防碰撞判斷。
防碰撞方法判斷如下,假設:
x1和y1分別為本塔機大臂末端的橫坐標和縱坐標;
x2和y2分別為干涉塔機大臂末端的橫坐標和縱坐標;
x3和y3分別為干涉塔機回轉中心的橫坐標和縱坐標;
x4和y4分別為本塔機小車的橫坐標和縱坐標;
L1為本塔機大臂末端與干涉塔機大臂末端間距,
其公式為:

L2為本塔機大臂末端與干涉塔機回轉中心間距,其公式為:

L3為本塔機小車到干涉塔機回轉中心間距,其公式為:

當以下三種情況任意一種發生時控制器將發出報警,提醒操作人員注意操作,從而起到防碰撞報警作用:
情況一:如圖5(a)所示,當 L1小于防碰撞限定值時;
情況二:如圖5(b)所示,當L1+L2-L3小于防碰撞限定值時;
情況三:如圖5(c)所示,當小車進入干涉區(即L3小于L2)時(若本機大臂高度低于相干涉的塔機的大臂高度,將不需要考慮本情況,大臂高度參數需在使用前錄入)。
通過ZIGBEE通信模塊,實現了塔機間的無線通信,使得防碰撞信息的獲取成為可能;在獲取了防碰撞信息的基礎上,通過上述判斷方法的判定,實現了針對塔機集群作業防碰撞的全方位安全監控,有效避免碰撞事故發生。
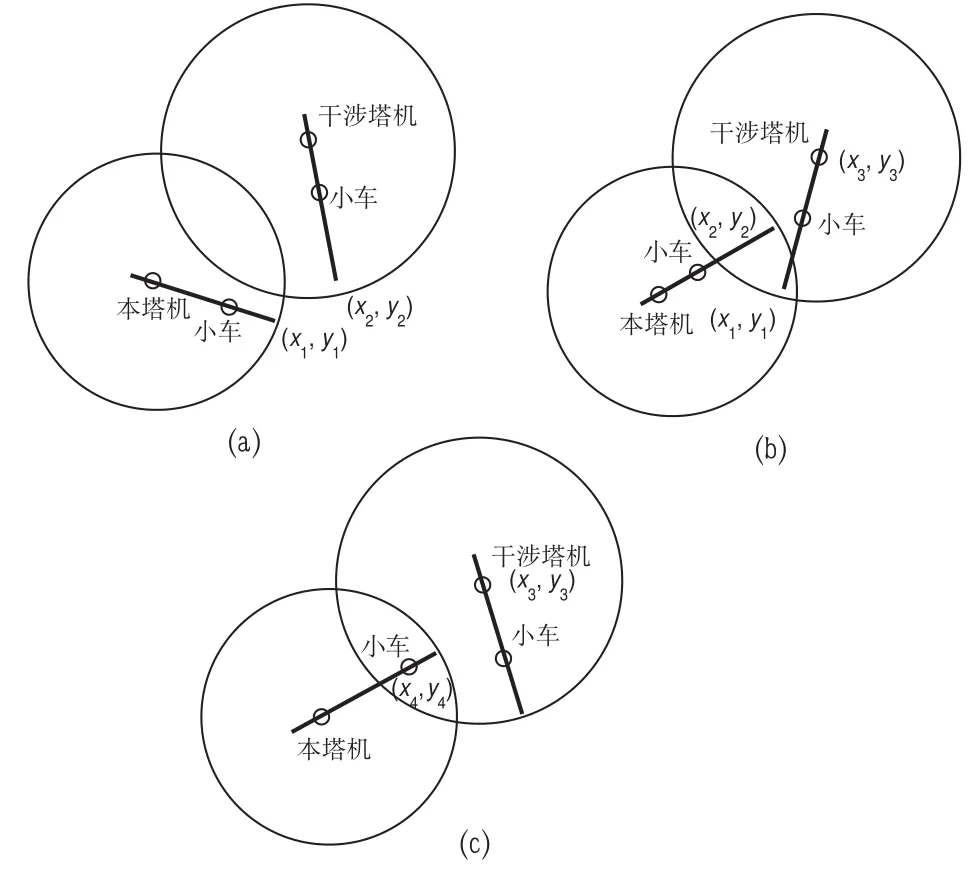
圖5 防碰撞示意圖
7 輸出控制與報警
根據前一小節的防碰撞算法進行判斷是否將發生碰撞,并根據這一結果進行報警和控制輸出防止發生碰撞。
7.1 回轉方向標定
由于控制器與塔機旋轉方向并無關聯,所以要進行塔機回轉方向標定,使得回轉傳感器(行程限位器)反饋到系統的AD值增加或減少與回轉方向關聯。
在角度標定時,按照系統圖示要求先標0°,然后順時鐘旋轉90°,如果90°對應的角度AD值比0°時的角度AD值大,將回轉方向標志位Rotary_ Direction寫為“1”,否則寫為“0”。
7.2 塔機回轉危險方向判斷
為進行回轉控制,就必須對塔機回轉危險方向進行判斷。如果塔機進入報警區域,那么回轉危險方向記錄到Rotary_Danger_Direction(0:回轉無危險;1:順時鐘回轉危險;2:逆時鐘回轉危險),如果當前運動方向進入危險方向,那么該方向將記錄到Rotary_ Danger_Direction,并且系統將禁止該方向的運動,但可反方向運動,直到其離開報警區域后 ,Rotary_ Danger_Direction將被置0。此外,進入危險區域后,塔式起重機小車將禁止向外變幅。
為了準確判斷出危險方向,記錄危險標記Rotary_Danger_Direction,將在由非報警區進入報警區時修改回轉危險方向,而由報警區退出報警區時將回轉危險方向記錄清零。

表2 回轉控制邏輯表
8 局域數據通信
系統形成基于Zigbee通訊模塊的MESH網絡,組網通訊,實現局域數據通訊。每臺終端設備在本工作群組都有一個Zigbee通訊模塊,設有唯一的ID。開機后該群組的設備將展開競爭,其中一臺的終端設備成為主機,負責組網通訊,其它作為從設備,每臺終端設備都通過主機無誤的獲取數據,對10組設備通訊測試對比,統計數據顯示通訊準確率達100%。如果主機退出后,其它剩余的設備將競爭產生一臺主機,繼續完成數據收發的任務。
9 總結
塔式起重機集群防碰撞系統安裝在江西理工大學校內建設工地的兩臺塔式起重機上、北京央視大樓附近的CBD項目,經過多月的實際測試,其有效的提高了作業安全性,系統運行可靠。本算法及系統應用于建筑用塔式起重機的集群防碰撞,可靠性高,其通過系統局域組網通訊模塊Zigbee模塊組網,實現了區域低成本、高可靠的通訊,系統具有很強的開放性,設備動態接入,靈活方便。
本系統對建設施工垂直運輸起重設備——塔機進行監控、預報警、記錄數據的同時,通過移動通訊基站將塔機運行各項涉及安全數據和預警、報警信息等發送到服務器,并能在發生報警或者違規操作時自動觸發手機短信通知,也可在手機上安裝APP,系統會自動將塔機運行信息推送至手機,從而實現有效的、開放的、實時的、動態的、可溯源監管。
其工作原理及設計思路適用于測點分布范圍廣、數據需要遠距離傳輸的應用場合,系統設計可移植應用于工業過程控制、便攜式儀器儀表、測量、無線智能傳感器以及遠程數據采集系統中。
[1] 潘琢金.C8051 Fxxx高速SoC單片機原理及應用[M].北京:北京航空航天大學出版社,2002.
[2] 令召蘭.基于MAS的多塔機防碰撞控制系統研究[D].西安:西安理工大學,2007.
[3] 楊鵬.基于MSP430和nRF905的塔式起重機無線遙控系統[J].機電工程,2008,25(1):34-36.
[4] 傅健.基于單片機控制的塔式起重機起重性能顯示[J].PLC&FA,2006,(05):94-96.
[5] 皮紅梅,楊松,李英順.用單片機技術實現起重機力限器的設計[J].吉林化工學院學報,2003,20(2):70-72.
[6] 張大志.塔式起重機力矩限制器調試[J].建筑機械,2003,(04):55-57.
[7] 贛州德業電子科技有限公司.一種塔機集群作業防碰撞方法及其裝置[P].中國:ZL201110126096.2,2013-05-15.
Anti-Collision Design of the Tower Crane
Xiao Qing1Deng Jianyu2Li Feng1
(1. College Of Applied Science, Jiangxi University Of Science and Technology Ganzhou 341000)
(2. Ganzhou construction safety supervision and management station Ganzhou 341000)
The tower crane is more and more used in the construction industry, crash accident between adjacent tower cranes is easy to happen when a plurality of tower crane machine are working in one region. This design is based on wireless network communications using ZIGBEE module in 2.4G frequency with high anti-interference performance, can arrange different communication ID address and channel number for different sites, could take data exchange in a local region through its implementation of dynamic access equipment to satisfy communication in fnite distance and the requirement of collision preventing of tower cranes in a local region. Through the actual test, tower crane anti-collision system works reliably, and can be widely used on torque control device in industry, agriculture, transportation, logistics, electricity, water conservancy, environmental protection and other industries.
Group for preventing collision Torque control ZIGBEE Internet of things
X941
B
1673-257X(2017)01-0021-05
10.3969/j.issn.1673-257X.2017.01.004
肖清(1975~),男,碩士,講師,主要從事微機控制、物聯網技術應用工作。
2016-04-26)
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00