一種微小型無人船控制系統設計及航向控制方法研究
2017-02-27 11:33:32張浩昱
計算機測量與控制 2017年1期
張浩昱,劉 濤
( 哈爾濱工程大學自動化學院,哈爾濱 150001)
一種微小型無人船控制系統設計及航向控制方法研究
張浩昱,劉 濤
( 哈爾濱工程大學自動化學院,哈爾濱 150001)
無人船在保護海洋環境和開發海洋資源方面具有廣泛的應用前景和市場價值;微型無人船研制成本低、機動靈活、攜帶方便且易于開展實驗,相比常規水面無人平臺有明顯優勢;微小型無人船不僅可以用于海洋環境監測,也可以作為海上通信中繼平臺,在軍事應用領域也有其潛在應用價值;文章設計了一種基于ARM的微小型無人船控制系統,同時進行了詳細的控制系統硬件設計和軟件設計,并通過水池實驗結果驗證了該控制系統的有效性和實用性;此外,針對無人船航行過程中存在風浪流混合干擾的問題,結合模糊控制技術和傳統的PID控制技術,提出了一種模糊PD控制算法,實現了PD控制參數的在線自適應優化調整,進行了相應的水池試驗并與傳統PD控制算法進行了對比分析。
ARM;無人船控制;航向控制;模糊PD控制
0 引言
無人船是一種新型的海洋運載平臺,在民用和軍事領域具有極其廣泛的應用前景,可以進行海洋環境監測、海洋氣象預報、通信中繼、領海監視等工作。微型無人船研制成本低、機動靈活、攜帶方便且易于開展實驗,相比常規水面無人平臺有明顯優勢。其控制系統多采用模塊化結構設計,易于快速集成,搭載不同的傳感器就可以完成不同的工作任務。隨著無人水上平臺的推廣以及相關定位、導航與控制技術的快速發展,越來越多的無人水上自主平臺將應用于海洋監測領域[1]。
美國和以色列在無人船的研究方面一直處于領先地位。世界其它國家也積極地開展了無人船的研究。美國研制的斯巴達偵察兵無人船,采用的是模塊化的結構設計,是一艘典型的高航速、高機動性、模塊化的無人船。以色列的保護者號無人船,如圖2所示,是由以色列拉斐爾武器發展局所開發的,船長9米,為剛性充氣艇,采用噴水推進,最大航速超過30節。英國普利茅斯大學開發了無人船“Springer”號搭載了水質監測傳感器,可應用于海洋環境監測。
運動控制技術研究,是無人船實現無人自主航行的關鍵技術之一。在無人船的航向控制方面,已有很多學者進行了相關技術的研究。國內不少學者研究了多種不同智能控制及其混合控制方法,如哈爾濱工程大學朱齊丹提出了一種將反步法和非線性滑模觀測器相結合的控制方法,并且通過仿真數據證明了算法的有效性[2]。孟浩等人提出了一種基于神經網絡參考模型的航向智能自適應算法,設計了神經網絡模糊控制器,并通過仿真實驗驗證了控制算法的有效性[3],但并未開展實際航行測試。一些歐美發達國家的學者將基于PID及其改進控制算法應用到實際應用中,目前對無人船的實際控制研究處于領先地位。意大利熱那亞大學設計了基于PD控制算法的航向控制器,之后結合PI控制技術和高增益控制技術提出了一種新的航向航速控制算法,并進行了相應的航行實驗[4-5]。為了實現無人船在復雜海況下的自主航向控制,本文設計了一種無人船的模糊PD航向控制算法,并通過水池試驗驗證了該算法的有效性和可靠性。
1 無人船的自主運動控制系統平臺設計
本文所研制的微小型無人船,船體采用玻璃鋼工藝加工完成,尺寸為1 600×480×460 mm,配備了水循環冷卻系統,設計時速可達25 km/h。船載控制系統以ARM控制器為核心,通過串口與三維電子羅盤、GPS模塊、無線電模塊通信,采用鋰電池作為供電電源;基于μCOS-II嵌入式操作系統實現指令的傳輸、獲取無人船的姿態信息、控制舵機角度和無刷直流電機轉速的功能,實現無人船的自主航向控制。采用LabWindows/CVI設計了岸基監控系統,實現了無人船位置、航向、速度等信息的實時監控以及控制參數、航向、航速等指令的實時發送等功能。
1.1 船載控制系統硬件設計
選用意法半導體公司生產的32位微控制器STM32F103ZET6作為船載控制系統的核心處理模塊,主頻為72 MHz,片內FLASH容量為512k,具有多達80個IO、4個通用定時器、RS232等大量接口資源;采用DCM302B三維電子羅盤測量無人船航向、橫搖、縱搖姿態信息,航向測量精度可達0.5°;無線通訊部分采用SX1278的無線電通訊模塊,最大通訊距離為5 km,可以實現無線電信息收發,提供岸基與無人船的信息交互;螺旋槳采用直流無刷電機驅動,采用PWM接口進行調速控制;舵機的控制也是PWM脈寬調制接口控制;控制系統的電源部分設計采用了控制用電和動力用電分開的原則,控制用電供電電壓為5 V,電池容量5 000 mAh,動力用電為16.8 V,電池容量30 000 mAh,續航時間為20-30分鐘。控制系統的硬件系統組成見圖1所示。

圖1 無人船控制系統原理圖
1.2 船載控制系統軟件設計
船載控制系統采用基于μCOS-II的嵌入式操作系統實現多任務軟件模塊并行工作,包括航向控制任務模塊、航跡控制任務模塊、電子羅盤輸入任務模塊、無線電指令輸入任務模塊、GPS輸入任務模塊等。
本文在STM32控制器上移植了μCOS-II的嵌入式操作系統,并實現了船載控制系統的多任務調度。軟件部分具體設計主要包括利用定時器定時讀取三維電子羅盤角度信息,設定每隔200 ms讀取一次當前的航向;控制IO引腳發出脈寬調制信號,脈寬調制信號通過定時器產生,實現舵機的偏轉和對無刷直流電機的調速控制;與無線電模塊進行數據通訊,無線電指令的收發主要是基于串口操作,船載控制系統通過串口中斷函數接收數據,并根據事先設定的數據傳輸協議控制無人船進行不同的動作;航向控制軟件算法通過讀取電子羅盤的輸出信息,與預期航向相比較得出偏差信號及其變化率,軟件算法實現的模糊控制器以偏差信號及其變化率為輸入,PD控制參數為輸出,實現了對PD控制器控制參數的優化,優化后的無人船航向控制自適應模糊PD控制器產生控制信號,通過改變PWM波的占空比來改變舵偏,最終實現了無人船的航向控制。
1.3 岸基監測界面設計
岸基監測系統主要包括無線電模塊和岸上計算機,采用LabWindows/CVI軟件設計開發了監測界面,具有指令收發功能,實時顯示無人船的經緯度地理坐標、航向和航速等信息,能夠遠程操控無人船,還能夠修改控制參數。
2 無人船的模糊PD航向控制
無人船航向參數自整定模糊PD控制器可以實現PD控制器控制參數對各時刻航向角偏差、航向角偏差變化率的自適應功能。利用模糊控制器實現對PD控制器各控制參數的優化,最終得到了無人船航向控制的自適應模糊PD控制器,系統結構見圖2所示。

圖2 自適應模糊PD控制器
上圖中模糊控制器部分的設計中以無人船航向偏差及偏差變化率作為模糊控制器的輸入變量;模糊隸屬度函數的選擇為最常見的三角型隸屬度函數;解模糊化的方法采用面積中心平均法。由于需要同時控制改變PD控制器的兩個參數變量Kp和Kd,因此需要設計兩個模糊控制器來實現同時控制兩個參數的變化,各參數的控制調整規則參見下表1、表2[7],其中第一行代表e,第一列代表de/dt。

表1 Kp模糊控制規則表

表2 Kd模糊控制規則表
3 水池航行實驗
系統集成、調試完成后,在哈爾濱工程大學綜合試驗水池實現了微小型無人船的航向控制試驗,水池長50 m,寬20 m,無人船螺旋槳轉速控制在1 000 r/min。無人船可以將當前航向數據通過無線電傳送到岸上監測系統,岸上計算機保存航向數據,繪制相關曲線。水池實驗場景如圖3所示,無人艇船模型如圖4所示。

圖3 無人船水池實驗圖

圖4 無人船模型圖
本文采用傳統PD控制和模糊PD控制兩種控制方法實現了無人船的航向控制,實驗數據曲線如圖5~6所示,兩種控制方法試驗結果數據對比如圖7~8所示。
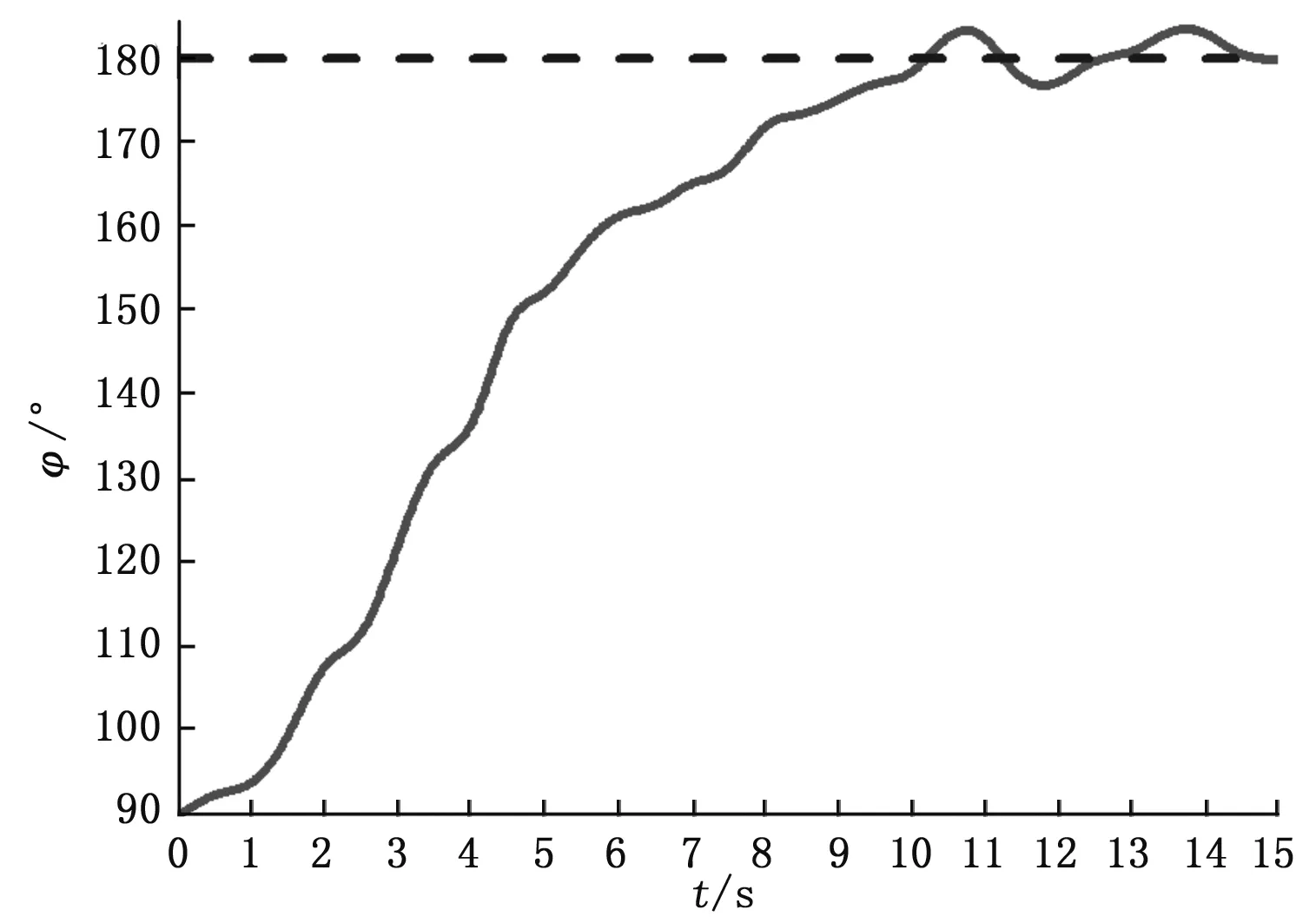
圖5 模糊PD控制器90°-180°航向控制實驗

圖6 傳統PD控制器60°-90°航向控制實驗

圖7 60°航向控制試驗結果對圖

圖8 80°航向控制試驗結果對比圖
從實驗結果可以看出,兩種控制方法都能夠實現無人船的航向控制。從控制效果來看,傳統PD控制器響應速度較慢,超調量較大,可以將航向精度控制在5°以內,當航向穩定時,受外界干擾影響較大;利用本文所設計的模糊PD控制器響應速度較快,超調量較小,可以將航向控制精度控制在2°以內,當航向穩定時,受外界干擾影響較小。這是由于模糊PD控制器可以根據當前的誤差及其變化率自主改變PD控制器的控制參數,在實驗中遇到干擾時可以更好地對當前干擾做出反應。因此,本文所提出的模糊PD控制器具有優良的航向控制能力,并且具有抗干擾功能。
4 結語
本文介紹了一種基于ARM控制器的微小型無人船控制系統的軟硬件設計,設計了一種模糊PD航向控制方法,進行了相應實艇航行試驗,驗證了算法的有效性和可靠性。所開發的岸基監控系統可通過無線傳輸模塊實現控制指令收發,實時顯示無人船的航向信息,進行自主控制、遠程遙控。水池實驗結果表明,所設計的模糊PD航向控制算法相比廣泛采用的PD控制算法,航向控制精度更高,控制穩定性更好。
[1] 天 鷹. 從無人水面艇的軍事應用看中國海軍無人水面艇的發展前景[J]. 艦載武器, 2012(2): 28-34.
[2] 朱齊丹, 周 芳, 趙國良, 等. 基于反步法和滑模觀測器的船舶航向控制[J]. 華中科技大學學報, 2009, 37(4): 122-125.
[3] 孟 浩, 趙國良. 基于神經網絡參考模型的船舶航向智能自適應控制系統[J]. 哈爾濱工程大學學報, 2003, 24(4): 395-399.
[4] Bibuli M, Bruzzone G, Caccia M, et al. Seil-oscillation based identification and heading control for unmanned surface vehicles[A]. RAAD 2008 17th International Workshop on Robotics in Alpe-Adria-Danube Region[C]. Ancona, Italy, September, 2008,15-17: 1-6.
[5] Bibuli M, Bruzzone G, Caccia M, et al. Swarm-based path-following for cooperative unmanned surface vehicles[J]. Institution of Mechanical Engineers Part M-Journal of Engineering for the Maritime Environment, 2014, 228(2): 192-207.
[6] 廖煜雷. 無人艇的非線性運動控制方法研究[D]. 哈爾濱:哈爾濱工程大學, 2012.
[7] 董早鵬,無人艇運動模糊控制技術研究[D]. 哈爾濱:哈爾濱工程大學, 2013.
[8] 梁冠輝. 基于ARM的無人船控制系統[D]. 青島:國家海洋局第一海洋研究所, 2011.
[9] 金久才, 張 杰, 邵 峰, 等. 一種海洋環境監測無人船系統及其海洋應用[J]. 海岸工程, 2015, 34(3): 87-92.
[10] Caccia M, Bono R, Bruzzone G. Design and exploitation of an autonomous surface, vessel for the study of sea-air interactions[A]. 2005 IEEE International Conference on Robotics and Automation[C]. Barcelona, Spain, 2005: 3582-3587.
[11] Desa E, Maurya P K, Pereira A, et al. A small autonomous surface vehicle for ocean color remote sensing[J]. IEEE Journal of Oceanic Engineering, 2007, 32(2): 353-364.
[12] Naeem W, Sutton R, Chudley J. Modelling and control of an unmanned surface vehicle for environmental monitoring[A]. UKACC International Control Conference 2006[C]. Glasgow, Scotland, 2006: 1-6.
[13] 劉金琨. 先進PID控制Matlab仿真(2版)[M]. 北京: 電子工業出版社, 2005.
Miniature Unmanned Ship Control System Design and Research of Heading Control Methods
Zhang Haoyu,Liu Tao
(College of Automation, Harbin Engineering University, Harbin 150001, China)
Unmanned ships have broad application prospects and market value for protecting the marine environment and developing the marine resources. Miniature unmanned ships have the advantages of low cost, flexible mobility, easy to carry and easy to carry out experiments; Micro unmanned ship can not only be used for marine environmental monitoring, but also become a communication relay platform. This paper has designed a kind of micro unmanned ship control system based on ARM, at the same time designed the control system hardware and software, and verify the validity and practicability of the control system by the tank experiment results. In addition, for unmanned ship heading control in the presence of wind, wave and current hybrid interference, a fuzzy PD control algorithm has been put forward, combined with the fuzzy control technology and traditional PID control technology; the PD control parameters online adaptive optimization and adjustment has been realized; the corresponding pool experiments and the traditional PD control algorithm comparative analysis have been finished.
ARM;unmanned ship control; heading control;fuzzy PD control
2016-08-10;
2016-09-13。
國家自然科學基金項目(51409059);黑龍江省自然科學基金資助項目(F201342)。
張浩昱 (1994-),男,江蘇鹽城人,主要從事嵌入式控制系統方向的研究。
1671-4598(2017)01-0088-03
10.16526/j.cnki.11-4762/tp.2017.01.025
TP3
A
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
