變頻調速技術在4 m3電鏟上的應用
2017-03-01 17:01:56徐銀飛
科技資訊 2016年27期
徐銀飛

DOI:10.16661/j.cnki.1672-3791.2016.27.033
摘 要:該文簡要論述了4 m3電鏟電氣傳動系統的類型,對變頻調速技術的原理、4 m3電鏟交流變頻調速控制系統的特點進行了探討,并分析了交流變頻調速控制系統的速度轉矩特性。變頻調速控制技術近年來發展迅速,是未來電鏟電氣傳動系統的發展趨勢,在電鏟傳動系統中的應用會越來越廣泛。
關鍵詞:電鏟 變頻調速技術 電氣傳動系統
中圖分類號:TD65 文獻標識碼:A 文章編號:1672-3791(2016)09(c)-0033-02
目前,在我國的礦山中,4 m3電鏟的保有量比較多,國產設備太重WK-4系列以及撫挖重工WD-400系列是我國中小型礦山中應用最多的4 m3電鏟。4 m3電鏟型號的改進與其機械系統、電氣系統的發展變化是密不可分的,尤其是電氣系統的改進在其發展演變中扮演了極為重要的角色。
1 4 m3電鏟電氣傳動系統的類型
現階段礦用電鏟電氣傳動系統主要有直流傳動系統與交流變頻傳動系統兩大類。直流傳動系統在目前的礦山應用中還處于主流地位,交流變頻傳動系統屬于新型傳動系統,但發展較為迅速,是未來礦用電鏟電氣傳動系統的發展趨勢與方向。
直流傳動系統可分為機組直流傳統系統與可控硅直流調速系統。早期的機組直流傳動系統采用了直流發電機-直流電動機系統,調速由模擬電路、繼電器和晶閘管來實現,提升、推壓、回轉及行走均為直流電動機驅動,供電系統為直流發電機機組。可控硅直流調速系統相比于前者技術較為先進,效率也有所提升,采用的是晶閘管變流器-直流電動機系統,控制電路早期為繼電器有觸點、后繼升級為PLC控制。無論是機組直流傳動系統還是可控硅直流調速系統,都存在著維修工作量大、效率較低等直流電機的固有缺陷,無法從根本上解決實踐應用中存在的問題。
交流變頻傳動系統近年來發展迅速,相較于直流調速系統,具有節電、可靠性高、調速性能好、生產效率高、維護量小、功率因素高等優點。變頻調速控制方式較多采用交—直—交控制系統,通過控制回路頻率的調整,控制可控硅的導通,直接調整交流電動機的轉速。控制系統采用PLC控制技術進行邏輯控制,系統包括 PLC控制器、交流感應電動機和專用變頻器。
2 變頻調速技術的原理
變頻控制技術目前已被廣泛地應用于電機控制領域,電力電子器件經歷了從晶閘管(SCR)、門極可關斷晶閘管(GTO)到絕緣柵雙極型晶體管(IGBT)、耐高壓絕緣柵雙極型晶閘管(HVIGBT)的發展過程。控制技術也由VVVF變頻,發展到了矢量控制變頻以及直接轉矩控制變頻。
變頻調速技術的基本原理為三相異步電機的轉速公式,即:n=n1(1-s)=60f(1-s)/p。由轉速公式可知,異步電機的調速可以通過改變電機的極對數、轉差率以及頻率來實現。但改變電機的極對數、轉差率存在著轉差損耗大、效率低的問題,對電機特性具有一定的局限性。而變頻調速是通過改變定子電源頻率來改變同步頻率實現電機調速的。在調速的整個過程中,從高速到低速可以保持有限的轉差率,因而具有高效、調速范圍寬(10%~100%)及精度高等性能,節電效果20%~30%。實際上,變頻調速的全稱應為可變頻率可變電壓調速,也就是說,在改變頻率的同時還需要改變電壓才能獲得良好的變頻特性,頻率與電壓協調控制是變頻調速的基本要求。
3 4 m3電鏟交流變頻調速控制系統的特點
4 m3電鏟交流調速控制系統的信號信息交換采用Profibus總線傳輸協議,PLC控制器為核心控制器,目前主要采用西門子S7-300型。提升、推壓、回轉、行走分別采用1臺250 kW、1臺90 kW、3臺75 kW以及1臺90 kW的交流鼠籠式電動機;變頻控制器采用ABB生產的ACS800型專用變頻器。
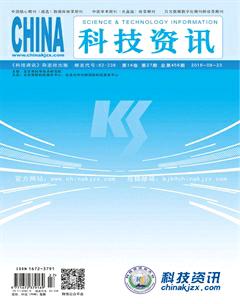
由圖1的電氣傳動系統主回路示意圖可以看到,4 m3電鏟交流變頻控制系統提供了1臺整流變壓器與1臺輔助變壓器。高壓電源AC6000V經高壓隔離開關、高壓熔斷器進入TM2輔助變壓器,輸出380 V/220 V/170 V電壓為電鏟各輔助電機及其他用電設備提供電源;經由高壓真空接觸器輸入到整流變壓器TM1,輸出AC690V電壓為提升、推壓、回轉/行走系統提供動力電源。提升、推壓、回轉/行走系統采用了3臺ACS800專用變頻控制器作為調速主控制器,由于電鏟在行走時不能使用回轉傳動裝置,因此,回轉與行走系統共用一臺變頻控制器,通過切換裝置實現回轉與行走不同狀態下的變頻控制。交流變頻調速控制系統與直流傳動的電鏟控制系統相較,具有節約電能、可靠性高、維護工作量小、功率因數及生產效率高的優點,是電鏟電氣傳統系統在未來的發展趨勢。
4 交流變頻調速控制系統的速度轉矩特性分析
從圖2可以看出,交流變頻控制系統的速度與轉矩特性分為AB、BC、CD三段,分別為啟動段、調速段與正常運行段。在啟動段,系統提供的是基于恒轉矩的調速輸出;調速段提供的是恒功率的調速輸出,而在正常運行段,則是基于自然機械特性的速度輸出。交流變頻調速控制系統的這種速度、轉矩特性與傳統直流傳動方式的下垂特性相比存在著明顯的差別。
電鏟屬于負荷變化很大的機械裝置,而且通常工作環境也比較惡劣,從生產工藝的要求出發,電鏟的拖動系統需要滿足以下幾個方面的要求:一是在正常工作范圍內設備需要保證具有較高的生產效率,即當負載增大時,拖動系統的轉速下降要小;二是當設備超負荷達到最大限值時,轉速能夠快速下降并自動限制堵轉電流,避免機電設備因系統超負荷運轉而受損,而當負載減小時,又能快速反應自動加速開始重新作業;三是電鏟的提升、推壓、回轉機構處于經常的起制動與正反轉,需要具備快速靈敏的反應過程能力;四是由于電鏟嚴苛的作業環境,其電氣傳動系統需要能夠承受得起劇烈的振動,不因此而損壞或形成隱患。
相較于傳統的直流傳動系統,交流變頻調速系統可以在低速及堵轉的條件下獲得最大的轉矩,提高了電鏟重載起動的能力,有效縮短了電鏟的起動時間,提高了生產率。而且從圖1可以看出,變頻調速控制系統的速度與轉矩曲線面積明顯大于傳統直流傳動系統,這也意味著在相同容量下變頻調速控制系統可以使電鏟獲得更大的有用力矩與鏟斗瞬時功率,可以有效提高電鏟的挖掘速度。
5 結語
由于電鏟作業對于電氣傳統系統的嚴苛要求,交流變頻調速系統成為了電鏟電氣傳統系統改進的趨勢。目前,太重以及撫挖重工都在4 m3電鏟上推出了交流變頻調速系統的改進型號,其性能相較于直流傳動系統均有較大提升,但對于多數礦山現在所保有的4 m3電鏟,由于在改造成本、技術等方面的原因,目前應用范圍還不是很大,還需要進一步地推廣與研發。
參考文獻
[1] 安景山.WK-4型電鏟調速方法探究[C]//中國冶金礦山企業協會、中鋼集團馬鞍山礦山研究院,2011年中國礦業科技大會論文集.2011.
[2] 楊振,王英才,由其元.4立方電鏟交流電氣傳動系統應用研究[J].冶金能源,2009(5):54-56.
[3] 程永峰.變頻調速技術在WD-400A電鏟上的應用[J].露天采礦技術,2011(6):69-71.