Application of Reverse Osmosis Technology in Boiler Water Treatment of Power Station
2019-09-25 07:10:54TongDeji
中阿科技論壇(中英文) 2019年3期
Tong Deji
(China Special Equipment Inspection and Research Institute,Beijing 100029)
Abstract:In order to improve the water quality of boiler water treatment in power station,the paper puts forward the reverse osmosis water quality treatment system by quoting reverse osmosis technology and analyzing reverse osmosis treatment process.Coagulant and multi-medium filter are used to remove impurities in boiler water,and salt is removed by driving mixed bed device to obtain user water.The application results show that the desalination rate of boiler water is above 97.5%,which meets the requirements of water quality treatment,and the cost is low,which can create more economic benefits for enterprises.
Keywords:reverse osmosis technology;boiler water treatment;multi-medium filter
In recent years,Chinese rapid industrial development has increased the demand for electricity.In addition to the application and development of wind,solar and other renewable energy sources,coal and other resources are the main energy sources for the development of electricity,and many power plants have been built[1].Coal resource has large energy and can meet the electricity demand of most regions,so China takes coal resource as the main resource of electricity development[2].However,this kind of development method needs the help of boiler combustion,which has a high requirement on boiler water quality.Therefore,how to deal with boiler water in power station has become a key research problem,which will be studied in this paper.
I.Reverse Osmosis Treatment Process
Reverse osmosis technology is a kind of comprehensive technology that efficiently process raw water with the help of filters,water tanks,pumps and other devices,which is mostly used to improve water quality.This paper will select this technology as the core technology of boiler water quality treatment,as shown in figure 1.
Inject raw water into the raw water tank,start the raw water pump,add flocculating agent,after the treatment of multi-medium filter,use scale inhibitor to prevent boiler water from generating scale,put the treated boiler into the cartridge filter,start the high-pressure pump,after cleaning,decarbonize,the boiler water flow to the middle water tank,start the middle water pump,connect the regenera-tive apparatus and desalination water tank with the help of mixed bed,and start the desalination water pump to generate user water[3].In this process,roots blower is used to remove impurities in the air tank,and build a regeneration apparatus,which will be used as an auxiliary appliance for mixed bed and multi-medium filter to complete boiler water treatment.

Figure 1 Flow Chart of Reverse Osmosis Treatment Process
II.System Design Based on Reverse Osmosis Technology
This paper will use reverse osmosis treatment process to gather multiple appliances and build a set of boiler water quality treatment system,so as to eliminate impurities in the boiler water and obtain user water after a series of treatments,so as to improve the utilization rate of water resources.
(i) Composition and Principle of the System
This system consists of nine parts,multi-media filter,flocculating agent adding device,scale inhibitor adding control mechanism,cartridge filter,reverse osmosis device,reverse osmosis chemical cleaning mechanism,carbon dioxide removal device,mixed bed device,regeneration device.
The working principle of the system:Flocculating agent and multi-medium filter are used to remove impurities in boiler water,and scale inhibitor is added to control boiler water state to avoid forming incrustation in water.Through the cartridge filter and reverse osmosis chemical cleaning mechanism to clean and filter,remove the carbon in the boiler water,under the action of mixed bed device,regeneration device,filter and remove the salt in the water to get clean water for users.
(ii) Detailed Design of System
1.Multi-media Filter
This device is mainly used to remove granular impurities in raw water,such as colloids and suspended substances[4].Among them,anthracite and quartz sand are the core components of the filter,which have a good role in filtering out granular impurities.After the treatment of this device,the turbidity of raw water reduced to a certain extent,and the effluent SDI is lower than 3,which meets the requirements of reverse osmosis inflow treatment.
2.Adding Flocculating Agent device
Polyaluminum chloride is the core part of this device,which not only has fast settlement speed and high working efficiency,but also not easily be affected by other factors,and has good stability.In the application of water quality treatment,it can effectively adsorb particles and filter suspended substances[5].
3.Adding Scale Inhibitor Control Mechanism
After the pressure drive command given by the system,the reverse osmosis desalination device separates the pure water from the dissolved salt and forms a material separation boundary in the water,which facilitates the separation of salt and water.The concentrated water end is easy to form scale,so add scale inhibitor to it to delay the time of scale formation and gain more time for subsequent treatment.Remove salt before scaling and get pure water.
4.Cartridge Filter
This device,also known as fine filter,is used for filter suspended substances,colloids,particles and other impurities in raw water again,providing a safe operating environment for reverse osmosis membrane,high-pressure pump and other devices,reducing interference from external factors and prolonging service life[6].
5.Reverse Osmosis Device
This system selects BW30-400/CPA3 reverse osmosis membrane to construct reverse osmosis device,which is driven and operated under PLC control.In practical application,in order to facilitate operation,automatic control valve is added to operate reverse osmosis device to start and stop.During operation,the device will automatically produce water and wash it.When it is not needed,soak it in fresh water to maintain permeable membrane.
6.Reverse Osmosis Chemical Cleaning Mechanism
In order to extend the service life of the osmosis device,the system adds a cleaning mechanism to clean the reverse osmosis device regularly.This mechanism consists of five parts,including pipe fitting,instrument,filter,cleaning pump and cleaning water tank[7].
7.Carbon Dioxide Remover
According to the water quality treatment requirements,the carbon dioxide content in the water shall not be higher than 5 mg/L.Due to the low performance of reverse osmosis membrane in gas filtration,in order to meet the water quality gas treatment standard,the system uses the exclusive carbon dioxide filter to treat,so as to reduce the load of anion exchange resin and make it reach the expected treatment target.
8.Mixed Bed Device
The device plays the role of anion and cation exchange in the system,and controls the distribution of anion and cation in water quality by setting the hardness of water and using mixed bed treatment,so as to achieve the purpose of controlling the conductivity of water quality and generate water with the standard hardness.
9.Regenerative Apparatus
The regeneration device is an auxiliary device to adjust the concentration and flow of raw water.It controls the regeneration liquid by using devices such as acid mist absorber,acid and alkali sprayer and acid and alkali storage tank,so that the concentration and flow remain constant within a certain range.
III.Application Research of the System in Water Treatment of Power Plant Boiler
In this paper,the water quality treatment system is applied to the boiler water treatment project of Huaneng Changchun Thermal Power Plant,and the reliability of the system development scheme is verified by observing the water treatment effect.
(i) Introduction of the Project
The boiler water treatment project of Huaneng Changchun thermal power plant is a water quality treatment project to treat the impurities and scale in the boiler water of the power station so as to obtain the of the standard water.The water treatment of this project is 500 m3/day,and the water quality requirements are high,which cannot be met by traditional water treatment methods.In this paper,reverse osmosis system will be applied to purify water source through a series of treatment,such as dirt filtration,so as to make the water quality index meet the standard.
(ii)Pretreatmenttment
Take boiler water raw water with PH of 6.9~7.1 and control the temperature range at 20~25℃.Construct the pretreatment device by using multimedia filter and flocculating agent adding device.The boiler water is pretreated by this device,and the granular impurities are filtered out.After repeated continuous flushing,the water turbidity is reduced.
In this practical application experiment,the pretreatment device of the system was tested.After 60 days of test and observation,the filter strength of the device met the treatment requirements,and the backwash strength was 14L/(s·m2).For the backwashing of the gas,the strength reaches 17 L/(s·m2)and the expansion height is about 50%,with high filtration performance.
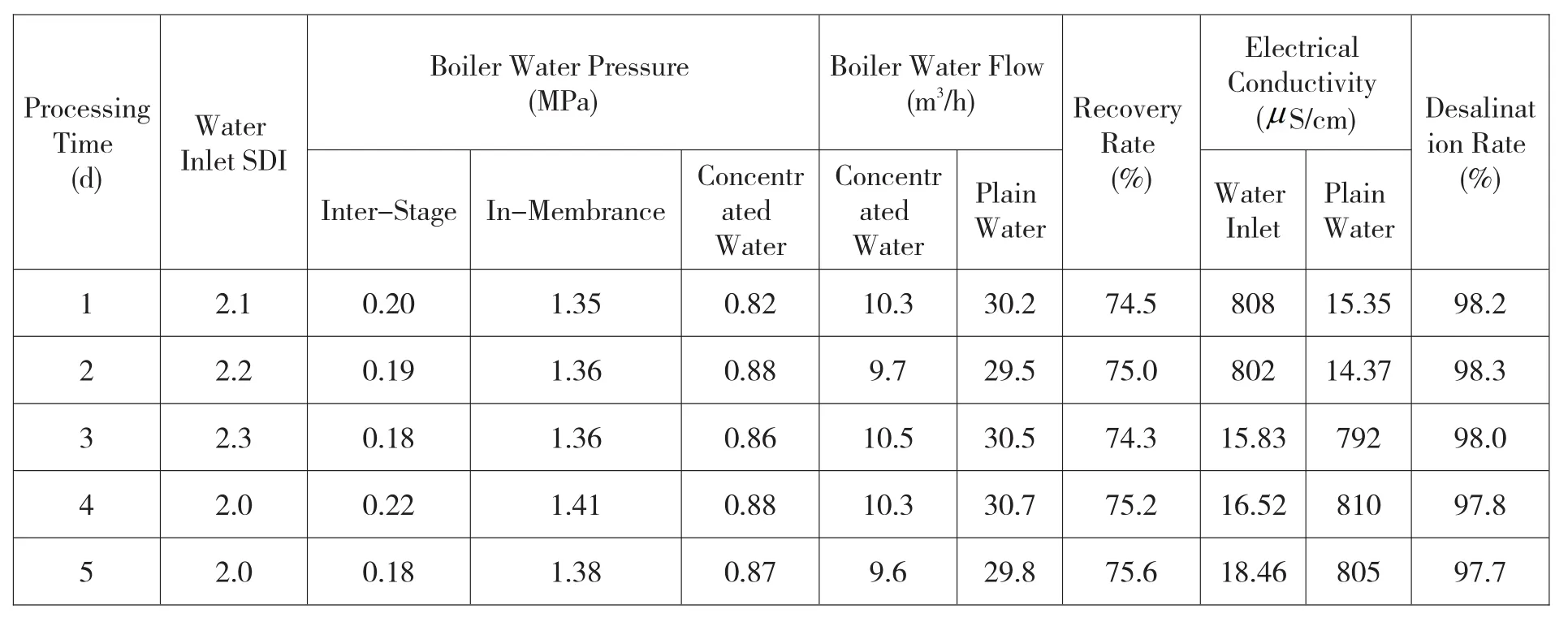
Table 1 Statistical Table of Boiler Water Treatment Data in Reverse Osmosis System
(iii) Boiler Water Treatment in Power Station
The reverse osmosis system after pretreatment is built in the environment of the boiler water treatment of the power station,The flux of reverse osmosis membrane element was set as 22.4L/(s·m2),the difference between water outlet and water inlet pressure was 0.1 MPa,and the addition of scale inhibitor was 4 mg/L.The water quality treatment system was operated for 5 days to treat the boiler water in the power station,the results are showed in table 1.
According to the data in table 1,under the control of reverse osmosis system,the desalination rate of boiler water is above 97.5%,which meets the requirements of boiler water treatment.
(iv) Analysis of Engineering Benefit
The boiler water treatment system designed in this paper costs 3.52 RMB/m3.Among them,depreciation cost is 1.90 RMB/m3,pharmaceutical cost is 0.22 RMB/m3,labor cost is 0.41 RMB/m3,and electricity cost is 0.99 RMB/m3.In the water quality treatment of the whole project,the electricity loss cost of the system and the equipment depreciation cost are relatively high,which reduces the amount of pharmaceutical usage.According to the daily treatment of boiler water of 500 m3,the daily consumption is 1760 RMB.However,the daily consumption of traditional boiler water treatment device is more than 2000 RMB,and the situation that wastewater treatment exceeds the standard appears frequently,which is not conducive to environmental protection.Therefore,whether cost consumption or environmental protection,the reverse osmosis system designed in this paper has greater advantages and meets the requirements of boiler water treatment in power station.
IV.Conclusion
This paper conducts the study of the boilers water quality treatment of the power station,constructs the reverse osmosis water quality treatment system based on the principle of reverse osmosis process.Taking the boiler water treatment project of Huaneng Changchun thermal power plant as an example,it is put into use after pretreatment.The application results show that the desalination rate of boiler water is above 97.5%,which can effectively remove impurities from boiler water and generate user water.Compared with traditional boiler water treatment device,reverse osmosis system device costs less,which is helpful to improve the economic benefit of enterprises.

- 中阿科技論壇(中英文)的其它文章
- Application of Statistical Technique in the Management of Power Supply Enterprises at County Level
- Analysis of Existing Problems and Countermeasures of Enterprise Performance Management
- Application Analysis of ACL Technology in Small and Medium Sized Network Security Management
- Construction Analysis of Urban Underground Comprehensive Pipe Corridor Structure
- Evaluation of Uncertainty in Determination of Sucralose Content in Edible Betel Nut by High Performance Liquid Chromatography
- Main Disease and Control Method for Highway Widening Roadbed