基于智能化的汽車導航研究與設計
2017-03-03 09:10:48龐小蘭
汽車電器 2017年2期
龐小蘭
(廣東理工學院,廣東 肇慶 526100)
基于智能化的汽車導航研究與設計
龐小蘭
(廣東理工學院,廣東 肇慶 526100)
在現有汽車導航的基礎上設計智能導航升級系統,實現隨時隨地更新導航系統,同時在最優路線規劃方面提出硬件和軟件的設計方案。減少車輛在行駛過程中因前方施工或事故等因素造成的擁堵,提高行車的安全性和快捷性。
汽車導航;智能升級系統;最優路線規劃
近幾年,汽車導航系統在中國已基本實現普及,出行有汽車導航的指引給駕駛者提供了很大的方便。但是由于現有的汽車導航升級更新費時費力,導致行車過程中駕駛員走錯路線的事情時常發生,而且車輛在行駛過程中無法預知前方的道路暢通情況,從而使很多車主的汽車導航成為擺設。因此,本文從導航智能升級系統和最優路線的規劃兩方面來優化汽車導航的設計。
1 汽車導航智能升級系統設計
1.1 汽車導航升級系統現狀
眾所周知,車載定位導航系統要求具備高可靠性、良好的擴展性和兼容性[1],汽車導航的信號來自全球衛星定位系統,實際的道路情況每一段時間都在發生不同的變化。因此,汽車導航需要進行定期的升級更新數據信息,以保證行車中導航的規劃路線精準。現有導航的升級方法是:專業工作人員根據導航升級軟件和標準操作程序數據包內的編號,來識別導航的供應商,然后再依據對應汽車導航的相同供應商版本來進行升級更新。在實際升級更新操作時,因為汽車導航型號和版本的復雜性,導致無法對應升級的現象時有發生,從而影響駕駛員的正常使用。
1.2 汽車導航升級系統硬件設計
在現有汽車導航系統的基礎上設計USB接口,該接口稱為“母接口”。同時在汽車導航升級控制器上設計與其相匹配的USB接口,該接口稱為“公接口”。中間通過數據線直接把車載導航和導航升級系統連接起來。
在汽車導航升級系統結構中,信號采集裝置分別是導航軟件版本識別模塊、車型識別模塊、供應商識別模塊、觸摸顯示屏模塊以及導航升級模塊。設計一個核心元件——處理器。該元件需要接收導航軟件版本識別模塊、車型識別模塊、供應商識別模塊、觸摸顯示屏模塊以及導航升級模塊的信息,然后計算、分析、發出指令,通過USB接口輸出,見圖1。
1.3 汽車導航升級系統軟件設計
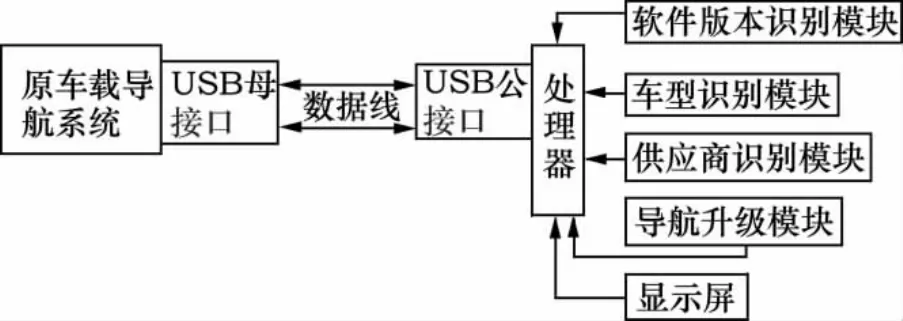
圖1 汽車導航升級系統結構圖
Android操作系統的智能手機現已普及應用。該系統與軟件免費,并且功能多。因此把Android操作系統作為汽車導航升級系統的應用平臺,更貼近消費者。
在汽車導航升級系統的設計過程中,利用了Android軟件平臺其中的2個功能模塊,他們分別是在應用程序層利用Android的各種組件API接口,開發了針對汽車導航升級模塊和電子地圖的Java應用程序。本文重點從無線網絡連接方面來進行設計。
進入系統時,系統會自動檢測網絡是否連接;如果連接超時,系統將停留在首頁。此時,可以向左滑動系統界面進入地圖頁面;如果聯網成功,則自動進入地圖頁面[2]。檢查網絡連接部分關鍵代碼如下:
*檢查網絡連接情況
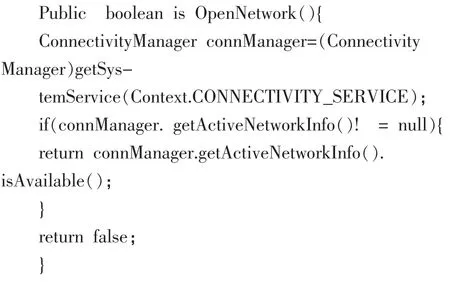
網絡連接成功后,進入Android操作系統的數據庫進行升級更新。
2 汽車導航最優路線規劃設計
開車出門,計劃的行車時間常常由于無法預料的交通事故或道路施工等造成的堵塞而產生比較大的影響,現有的汽車導航系統都無法避開前方堵車的路段。
本文設計的汽車導航最優路線規劃方案能避開這些因素,給駕駛者節省時間和成本。下面從硬件和軟件兩方面來說明汽車導航最優的路線規劃設計。
2.1 汽車導航最優路線規劃硬件設計

圖2 汽車導航最優規劃硬件設計結構
該系統組成如圖2所示。圖2中信息輸入裝置用于輸入目的地信息。GPS模塊用于接收衛星所傳遞的信息。無線通信模塊用于在輸入目的地信息時,從網絡終端收集路況交通信息,并每隔第一預定時間段重新收集路況交通信息。車載計算機用于計算汽車當前位置,計算所述當前位置與所述目的地間的第一最短路徑,確定從所述當前位置到所述目的地的路徑策略,并在無線通信模塊每次收集動作完成后重新計算汽車當前位置,重新確定路徑策略。所述路徑策略為:判斷所述第一最短路徑的長度是否超過第一距離參數值。若是,則提供第一最短路徑和避開與當前位置的最短路徑小于第二距離參數值的交通堵塞路口,且避開與當前位置的最短路徑小于第三距離參數值地點的N條路徑供駕駛員選擇;若否,則按正常導航模式進行導航,N為數量參數值。顯示裝置用于顯示從汽車當前位置到目的地的路徑。
2.2 汽車導航最優路線規劃軟件設計
根據2.1的硬件設計,該系統的軟件控制流程如圖3所示。

圖3 汽車導航最優路線規劃軟件設計流程
根據控制流程圖,采用路徑分析的基本方法SetPath進行最優路徑規劃設計。在具體的工程項目中,可以從SetPath派生出一個自定義路徑分析類和重載Distance方法,然后在該方法中根據具體的規則,求出記錄集中當前記錄的正向距離和反向距離,即可模擬道路真實狀況。或者根據具體的需要設定最優分析的屬性字段和權重規則,以完成最優路徑分析[3]。
1)SetPath:Analyse方法Long Analyse(long iD1,long iD2,CDArray iDs1,double length,CDArrayiDs2)
說明:路徑分析成功返回值大于0,否則返回-1或0;iDs1存儲路徑的各個弧段iD,次序為:開始弧段→終止弧段依次存儲;iDs2存儲路徑的各個節點iD,次序為:開始節點→終止節點依次存儲。
2)SetPath:Distance方法bool Distance(CSeR-ecordsetprArc,longiD1,longiD2,longiD3,dou-bleend,doublestart);
說明:根據實際規則返回節點間的距離;成功返回true,否則返回false。節點間的距離保存在end和start變量中。
當用戶進行目的地導航搜索時,用戶只需要在起始地址和目的地址導航搜索框鍵入相應的地址,程序開始讀取數據并進行地址解析,然后將起始地址和目的地地址的路徑在地圖上標注出來,同時計算出距離[4]。
3 系統測試
汽車導航的升級系統在Android操作系統(V2.2版本)環境下使用。經過實際應用后反映良好,數據升級速度快、操作方便、運行穩定可靠、瀏覽地圖流暢,達到了隨時隨地更新導航的目的。測試最優規劃路線系統:從廣東肇慶出發,通過大約350km路程到達廣東惠州。沿途經過廣州,通過該系統的導航語音提示,成功自動避開了堵車路段,經過大約3.5h順利到達目的地。說明該系統基本能達到最優化的路線規劃目的。
4 結束語
通過無線通信網絡接入,實現了基于Android操作系統汽車導航升級系統的設計,從而為汽車導航提供了高效、快捷的升級方法。同時對原有的車載導航系統進行最優路線規劃設計,駕駛者通過導航系統能及時了解前方的道路通暢情況,從而避開堵車路段,拓展了導航的功能。
[1]農麗萍,王力虎,黃一平.Android在嵌入式車載導航系統的應用研究[J].計算機工程與設計,2010,3(11):73-76.
[2]徐兵,廖友成,劉文杰,等.基于Android平臺的車載導航系統研究[J].計算機測量與控制,2014,22(2):601-603.
[3]范耀祖.車輛定位導航系統的發展狀況和趨勢[J].中國會展,2003(12):17-19.
[4]應文健.自主車導航中提高目標行為預測能力的新方法[J].計算機測量與控制,2012(8):2048-2050.
(編輯 張每文)
Research and Design of Intelligent GPS
PANG Xiao-lan
(Guangdong Polytechnic College,Zhaoqing 526100,China)
In this article,an new intelligent GPS system is updated based on the current model,which will provide updated service anytime and anywhere.At the same time,the design scheme of hardware and software is presented in the optimal route planning,so that the vehicle automatically avoids traffic jam caused by accidents or road construction,which improves traffic safety and efficiency.
GPS;intelligent updating system;optimal route planning
U463.675
A
1003-8639(2017)02-0064-03
2016-07-21;
2016-11-11
龐小蘭(1982-),女,河南人,工程碩士,車輛工程講師,主要研究方向是汽車電子技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
領導決策信息(2018年50期)2018-02-22 06:17:16
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
作文大王·低年級(2016年4期)2016-04-18 00:24:37
中國工程咨詢(2016年4期)2016-02-14 07:28:28
