
基于實測渣土輸出流量反饋的雙閉環盾構土壓平衡控制探索
2017-03-07 11:48:39邵成猛
城市軌道交通研究 2017年1期
邵成猛
(中國鐵建十六局集團有限公司,100018,北京∥高級工程師)
基于實測渣土輸出流量反饋的雙閉環盾構土壓平衡控制探索
邵成猛
(中國鐵建十六局集團有限公司,100018,北京∥高級工程師)
現有的盾構土壓平衡控制系統中,通常通過控制螺旋輸送機的轉速改變渣土輸出流量實現對密封艙壓力的控制。為克服螺旋輸送機理論計算渣土流量與實際輸出流量存在的偏差對密封艙壓力精確控制產生的影響,在現有盾構土壓平衡控制系統的基礎上,在輸送渣土的皮帶機上安裝皮帶秤,以準確實時測得螺旋輸送機的瞬時渣土輸出流量作為反饋信號構成螺旋輸送機轉速的控制閉環,并與密封艙壓力的反饋信號構成盾構土壓平衡雙閉環控制系統。通過仿真分析和現場試驗驗證了所建立控制系統的有效性。
盾構掘進機; 土壓平衡控制; 密封艙壓力; 渣土輸出流量反饋
Author′s address China Railway 16th Bureau Group Co.,Ltd.,100018,Beijing,China
土壓平衡盾構是盾構掘進機的一種,在其工作過程中會引起土體擾動,從而改變地層的應力狀態,進而造成地表變形,當變形過大時會引發地表開裂、地面建筑物傾斜等施工事故。目前,控制盾構工作過程中地表變形的基本方法是保證其密封艙土壓平衡[1-2]。
為了實現盾構密封艙壓力的快速精確控制,許多學者對相應的控制理論及方法進行了研究。文獻[3]解釋了盾構土壓平衡的實現過程,提出了兩種土壓平衡控制方法。文獻[4]基于PID(比例積分微分)控制器提出了密封艙壓力的控制方法。文獻[5]考慮盾構與土體的耦合作用建立了密封艙壓力的控制機理模型,并提出了優化控制算法。文獻[6]考慮推進速度波動的影響提出了一種土壓平衡復合控制方法。現有的盾構土壓平衡控制方法中,通常都是通過控制螺旋輸送機的轉速改變渣土輸出流量實現密封艙壓力的控制,但由于螺旋輸送機不一定時刻處于“滿載”狀態,只通過其轉速不能精確得到渣土的輸出流量,這對密封艙壓力的精確控制會產生一定影響。
為克服螺旋輸送機理論計算渣土流量與實際輸出流量存在的偏差對密封艙壓力精確控制產生的影響,在現有盾構土壓平衡控制系統的基礎上,在輸送渣土的皮帶機上安裝皮帶秤,以準確實時測得的螺旋輸送機的瞬時渣土輸出流量作為反饋信號構成旋輸送機轉速的控制閉環,并與密封艙壓力的反饋信號構成盾構土壓平衡雙閉環控制系統。為驗證所建立控制系統的有效性,進行了仿真分析和現場試驗研究。
1 密封艙土壓平衡原理
土壓平衡式盾構掘進機主要由盾體、刀盤、螺旋輸送機、推進裝置等構成。盾構掘進機前部的密封擋板與刀盤、切口環以及螺旋輸送機形成密封艙。在工作過程中,推進液壓缸驅動盾構掘進機向前推進,刀盤切削下的渣土填充密封艙和螺旋輸送機殼體內的空間,形成的土壓來平衡開挖面土層的水土壓力,以保持開挖面土層的穩定,防止地表變形,渣土通過螺旋輸送機排出盾體。盾構掘進過程中,需要使密封艙內的土壓和開挖面的水土壓力保持動態平衡。如果密封艙內的土壓大于開挖面的水土壓力,地表將發生隆起;反之,如果密封艙內的土壓小于開挖面的水土壓力,地表將發生沉陷[3]。為實現土壓平衡,可通過實時調節螺旋輸送機的轉速或調節液壓缸的推力,使盾構排土量和開挖量保持或接近平衡。
根據文獻[6]中的描述,將密封艙看作一個封閉容器,進入該容器的渣土流量取決于盾構的推進速度,而排出容器的渣土流量取決于螺旋輸送機的結構參數和轉速,密封艙的渣土流量連續性方程為:
(1)
式中:
qi——密封艙渣土的輸入流量;
qo——密封艙渣土的輸出流量;
Cepm——密封艙的泄漏系數;
pe——密封艙土壓力;
po——外界壓力(包括盾體前方的土壓力和水壓力);
Ve——密封艙容積;
βe——渣土的體積彈性模量;
D——盾構外徑;
v——盾構推進速度;
ηs——螺旋輸送機排土效率;
d1——螺旋輸送機葉片直徑;
d2——螺旋軸半徑;
Ts——螺旋輸送機葉片螺距;
nm——螺旋輸送機驅動液壓馬達轉速;
ig——螺旋輸送機減速機減速比。
忽略密封艙泄漏渣土的體積,可得到盾構密封艙土壓力變化差值為:
(2)
在盾構掘進過程中,土壓傳感器實時測量密封艙內的土壓,并與給定的土壓值進行比較,以調整盾構的推力或螺旋輸送機的轉速,完成密封艙壓力的閉環控制,實現土壓平衡。盾構的推進液壓缸上裝有位移傳感器,對所測得的位移信號進行差分后反饋到主控制器,實現對盾構推進速度的閉環控制。螺旋輸送機上裝有轉速傳感器,可實時測得螺旋輸送機的轉速。由于螺旋輸送機不一定時刻處于“滿載”狀態,只通過其轉速不能精確得到渣土的輸出流量,為實時測量螺旋輸送機輸出渣土的流量,在輸送渣土的皮帶機上安裝了皮帶秤。皮帶秤是采用杠桿原理設計的,在皮帶機的皮帶下面安裝杠桿裝置,皮帶上面的物料通過杠桿裝置的承載面時,會對承載面產生一定的壓力,杠桿裝置將該壓力傳送到稱重傳感器,結合皮帶機的實時速度,即可得到皮帶機上渣土的瞬時流量,從而得到螺旋輸送機輸出渣土的瞬時流量。通過對螺旋輸送機輸出渣土流量的實時測量,完成對螺旋輸送機轉速的閉環控制。盾構土壓平衡控制原理如圖1所示。
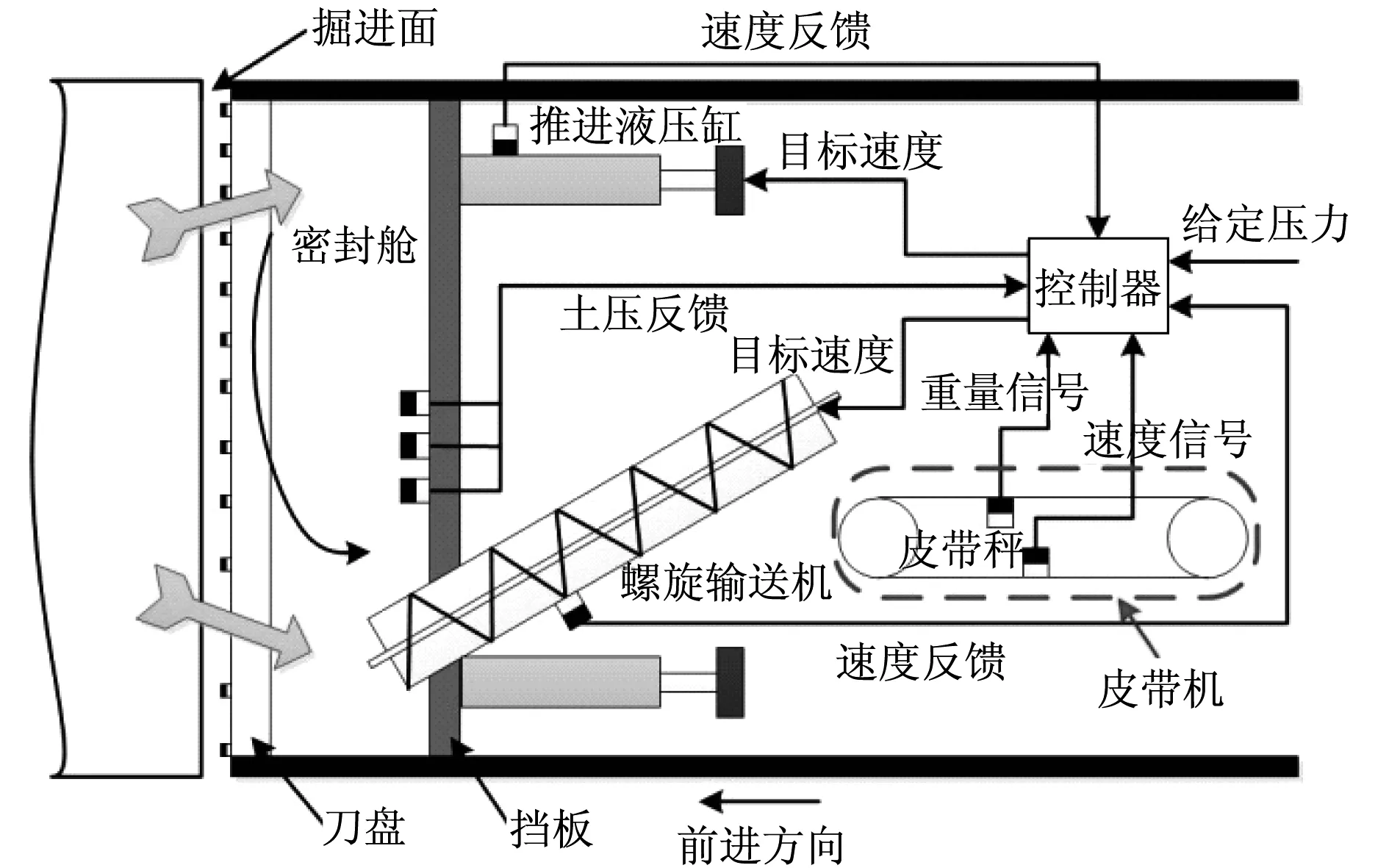
圖1 盾構土壓平衡控制原理圖
2 雙閉環盾構土壓平衡控制系統設計
實際盾構的推進速度是根據土層條件確定的,并受到盾構姿態調整等要求的影響,因此,盾構推進速度的調整不能僅依據土壓平衡的要求。通常采用控制螺旋輸送機的轉速來實現土壓平衡控制。根據文獻[6],設計了一種采用速度反饋的螺旋輸送機電液控制系統,得螺旋輸送機的速度控制方程nm=Nm(i,TL,ps,pa)(其中i為比例電磁鐵輸入控制電流,TL為螺旋輸送機負載扭矩,ps為控制系統供油壓力,pa為變量泵殼體壓力)。
根據式(2),可得到圖2所示密封艙土壓平衡控制系統的方框圖。圖中,is為螺旋輸送機變量泵起點控制電流,Gbf為反饋系數。
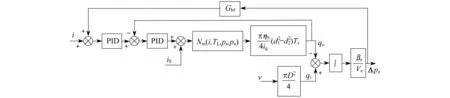
圖2 密封艙土壓平衡控制系統結構圖
3 仿真分析與試驗研究
為驗證所提出的基于渣土實測輸出流量反饋的雙閉環盾構土壓平衡控制系統的有效性,進行了仿真分析,并進行現場試驗研究。對于螺旋輸送機速度控制環節,進行由0到20 r/min階躍響應信號的跟蹤仿真;對于盾構密封艙土壓平衡控制系統,進行由0到20 kPa階躍響應信號的跟蹤仿真。仿真結果分別如圖3和圖4所示。
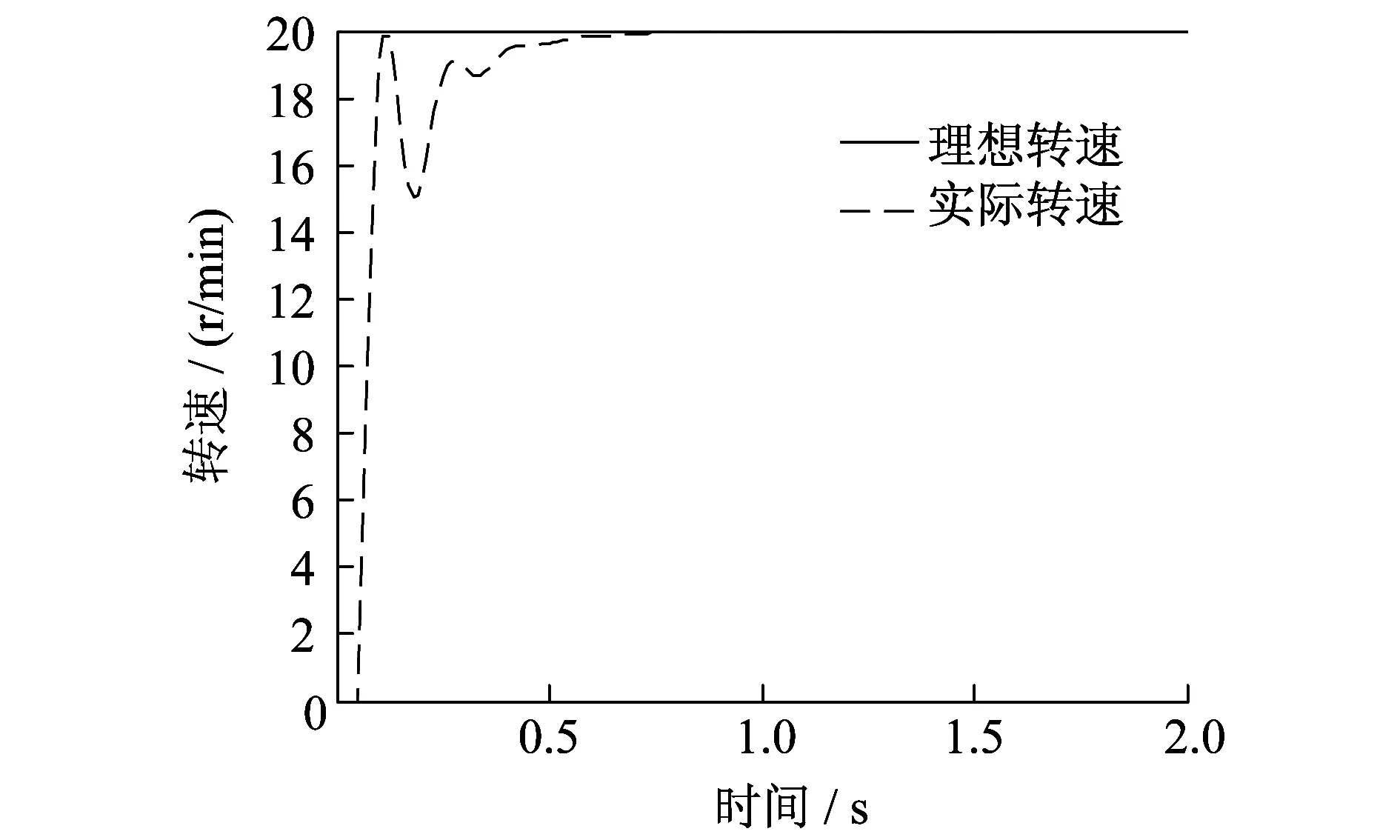
圖3 螺旋輸送機速度控制階躍響應
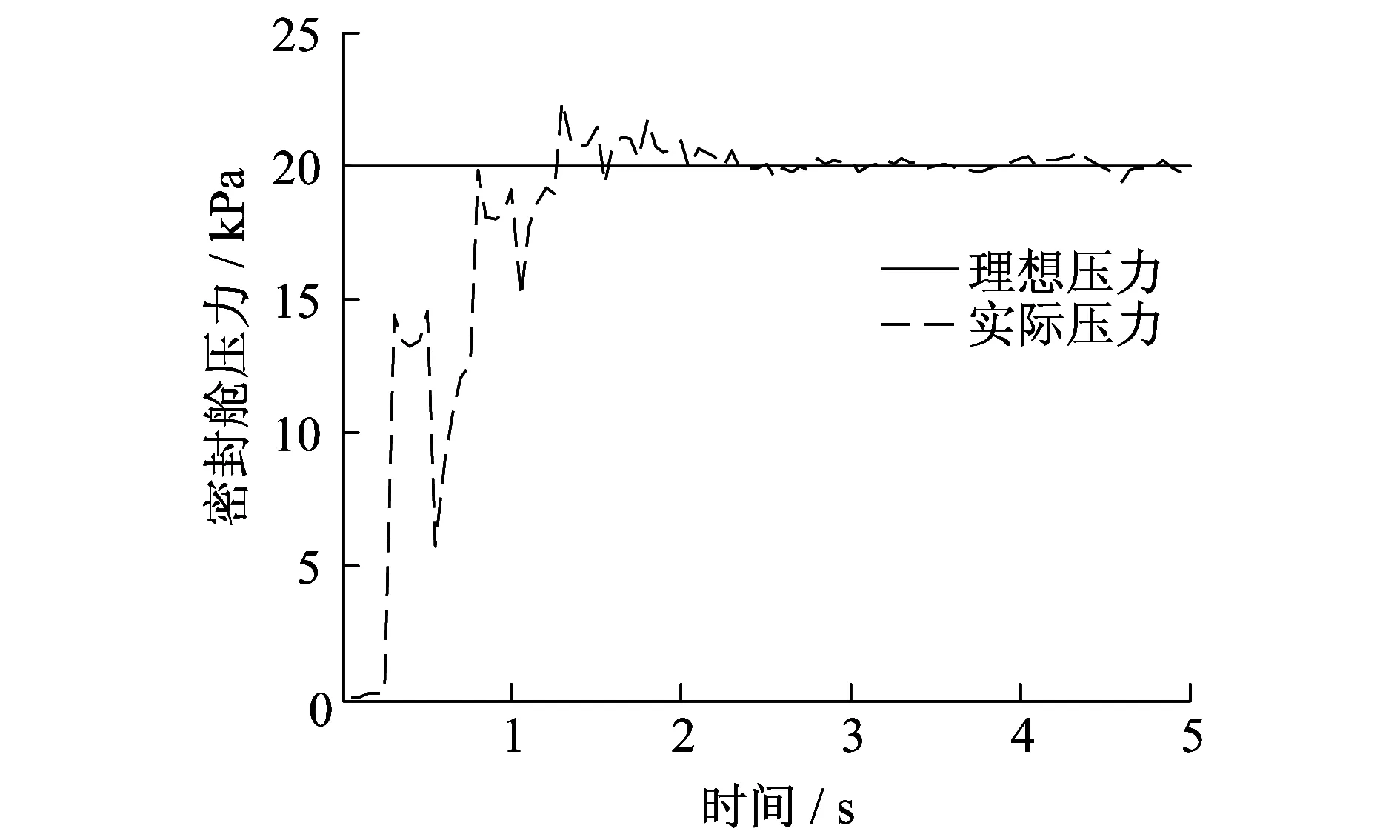
圖4 密封艙壓力控制階躍響應
由圖3和圖4可以看出,對螺旋輸送機速度控制環節和盾構密封艙土壓平衡控制系統進行階躍響應測試時,雖然都會產生一定的波動,但經過一定時間都能達到穩定狀態;螺旋輸送機速度控制環節的階躍響應時間約為0.55 s,盾構密封艙土壓平衡控制系統的階躍響應時間約為2.23s。
對所提出的土壓平衡控制系統進行現場試驗測試。該盾構機的直徑為6.41 m,推進速度為5 cm/min,所在工作土層的土密度為1.9 t/m3,設定密封艙理想土壓為200 kPa。將本土壓平衡控制系統的試驗結果與普通土壓平衡控制系統的結果進行對比分析,如圖5所示。
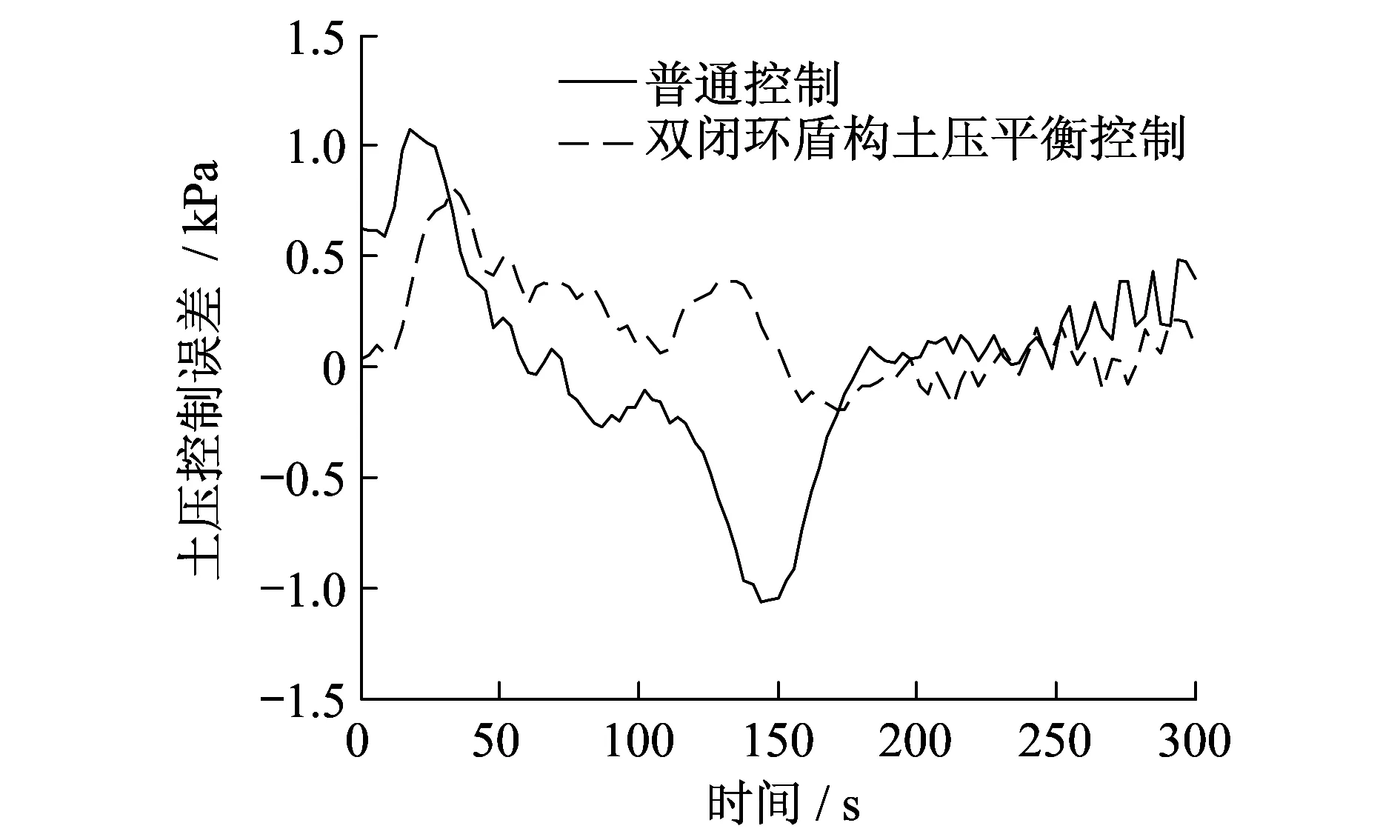
圖5 盾構密封艙土壓控制誤差
從圖5可以看出,采用基于渣土實測輸出流量反饋的雙閉環盾構土壓平衡控制系統時,盾構密封艙土壓控制的最大誤差為0.805 kPa;采用普通土壓平衡控制系統時,盾構密封艙土壓控制的最大誤差為1.07 kPa。相對于普通控制系統,本文所提出的土壓平衡控制系統的控制誤差有了較大程度的減小,驗證了該方法的有效性。
4 結語
為克服螺旋輸送機理論計算渣土流量與實際輸出流量存在的偏差對密封艙壓力精確控制產生的影響,對現有盾構土壓平衡控制系統進行了改進,在輸送渣土的皮帶機上安裝皮帶秤,以準確實時測得螺旋輸送機的瞬時渣土輸出量,并提出了基于渣土實測輸出流量反饋的雙閉環盾構土壓平衡控制。
對該盾構土壓平衡控制系統進行了仿真分析和試驗研究。對于螺旋輸送機速度控制環節,其階躍響應時間約為0.55s,對于盾構密封艙土壓平衡控制系統,其階躍響應時間約為2.23s。在現場試驗研究中,將所提出的土壓平衡控制系統的試驗結果與普通土壓平衡控制系統的結果進行對比分析,驗證了所提出方法的有效性。在此基礎上,將對本盾構土壓平衡控制系統進行現場試驗,進一步優化方案,以實際解決土壓平衡盾構施工出土量控制難的問題,從根本上減小盾構施工引起的地層損失率。
[1] SUCHATVEE S,HERBERT H E.Artificial neural networks for predicting the maximum surface settlement caused by EPB shield tunneling [J].Tunnelling and Underground Space Technology,2006(21):133-150.
[2] 張冬梅,黃宏偉,王箭明.盾構推進引起地面沉降的粘彈性分析[J].巖土力學,2001,22(3):311-314.
[3] 胡國良,龔國芳,楊華勇.盾構掘進機土壓平衡的實現[J].浙江大學學報(工學版),2006,40(5):874-877.
[4] YANG Huayong,SHI Hu,GING Guofang.Earth pressure balance control for EPB shield [J].Sci China Ser E-Tech Sci,2009,52(10):2840-2848.
[5] 上官子昌,李守巨,孫偉.土壓平衡盾構機密封艙土壓力控制方法[J].煤炭學報,2010,35(3):402-405.
[6] 王林濤,龔國芳,楊華勇,等.基于前饋-反饋復合控制的盾構土壓平衡控制[J].中南大學學報(自然科學版),2013,44(7):2726-2735.
Earth Pressure Balance Control Based of Double Closed Loop Shield Tunneling Machine on the Feedback of Output Flow Muck
SHAO Chengmeng
In the existing earth pressure balance control system, the pressure control of capsule is commonly achieved by changing the revolving speed of screw conveyer. To overcome the negative influences of the offset between theoretical calculation of sediment flow and actual output flow of screw conveyer on the precision pressure control of capsule, the existing earth pressure balance control system is improve by installing a belt weigher on belt conveyer to achieve real-time measurement of the muck output flow of screw conveyer. The feedback of muck output flow and the capsule pressure feedback signal constitute a double closed loop control of the earth pressure balance control system. Simulations and field tests have verified the effectiveness of the proposed method.
shield tunneling machine; earth pressure balance control; earth pressure in capsule; feedback of muck output flow
U 455.43
10.16037/j.1007-869x.2017.01.013
2015-04-13)
