
盾構隧道施工軸線糾偏計算方法
2017-03-07 11:48:40王運鋼徐巖軍
城市軌道交通研究 2017年1期
王運鋼 徐巖軍
(1.中鐵一局集團有限公司,710054,西安;2.中鐵一局集團城市軌道交通工程有限公司,710054,西安//第一作者,工程師)
盾構隧道施工軸線糾偏計算方法
王運鋼1徐巖軍2
(1.中鐵一局集團有限公司,710054,西安;2.中鐵一局集團城市軌道交通工程有限公司,710054,西安//第一作者,工程師)
地鐵隧道采用盾構法施工時,受到各種因素的影響,盾構機及隧道襯砌環的軸線會偏離設計軸線。此偏差甚至會超出允許范圍,從而引起隧道施工以及運行的安全隱患。針對此問題,總結了產生軸線偏差的各個影響因子,并提出了一種有效的糾偏方法。闡述了該糾偏技術的原理和實施方法。
地鐵; 盾構隧道; 軸線偏差; 糾偏方法
First-author′s address China Railway First Group Co.,Ltd.,710054,Xi′an,China
盾構隧道掘進,即通過人機交互式的方法控制配備有導向系統的盾構機沿著隧道的設計中線進行挖掘[1],并不斷地完成管片拼接、構筑隧道襯砌(這兩者對于施工階段以及后期運營階段的隧道內部和外部安全是至關重要的)[2]。但實際上盾構機軸線的真實行進線與設計軸線是不完全重合的[2],它是通過逐環的姿態監控和姿態修正,使得盾構機相對于隧道設計中線的偏差限制在允許范圍內,進而保證管片拼裝后的軸線偏差控制在限定值范圍內(一般平面和高程偏差均為±50 mm)。
受到地層和測量精度等因素的影響,某些掘進時刻盾構機及管片的軸線偏差接近甚至超出允許的偏差范圍,此時常規的蛇形修正法已無法滿足盾構隧道軸線偏差及隧道質量控制要求,需要提出新的盾構隧道糾偏技術,一方面盡快將盾構機的軸線偏差調整至允許范圍內,另一方面保證糾偏過程中管片平順,不產生過大的錯臺[3]及滲漏水等質量問題。
本文就軸線偏差產生的原因和提出的糾偏方法進行具體闡述,并結合實例介紹本糾偏方法的具體實施過程。
1 軸線偏差產生的原因分析
1.1 線形問題
盾構機經常會在曲線上始發,由于始發托架及始發階段的盾構機主體是直線形狀,而設計圖紙計算出來的隧道中心線卻位于曲線上,這樣在始發階段就無法避免地產生了軸線偏差。
1.2 洞門位置與車站結構相對空間尺寸問題
特殊情況下,有些始發井設計時未充分考慮盾構機及后車架始發的尺寸要求。如果使盾構機及后配車沿著設計線始發,則一側側墻的凈空不夠。為了保證盾構機順利始發,在托架定位時需要偏離隧道中心線一個角度,保證后備臺車能夠順利連接,因此盾構機進入土體后就會偏離隧道中心線。
1.3 管片選型不當
掘進循環過程中,管片選型[4-5]出現問題,導致盾尾間隙變小,為使盾構機能夠繼續前進、保護盾尾刷、防止管片破損等,不得不犧牲盾構機姿態,導致盾構機偏離隧道設計中線;盾構機推理參數設置不當,或者土壓傳感器顯示不準確,也會導致盾構機偏離隧道中心線。
1.4 軟硬不均地層
在復合地層中掘進時,有時會碰到軟硬不均地層,包括上軟下硬(居多)、左右地層強度不同等。一旦盾構掘進參數控制不當,尤其是推進速度控制及渣土改良出現問題,極易導致盾構偏離隧道中心線。
1.5 導向系統測量誤差
盾構導向系統激光站自動前移存在誤差累積,一般情況下,自動前移2次或距離為80 m左右需采用人工測量的方法進行復站。如果復站不及時,該誤差累計到一定程度,則在某一次復站后盾構姿態可能會發生大的跳動,有時跳動可達25 mm以上。
2 盾構隧道糾偏的工作原理
平面曲線的插補算法廣泛應用于工業數控系統中。其用樣條曲線[6-8]擬合出零部件表面的曲線[9],來保證加工的零部件表面的光滑和平順。雙圓弧擬合曲線方法是應用最為廣泛的一種插補算法。它利用兩個彼此相切的圓弧來擬合相鄰兩插值點[9-11]。本文借鑒該方法的核心思想提出了盾構隧道糾偏方法,將平曲線和豎曲線分別采用該方法進行糾正。
2.1 基本原理
以平曲線為例,糾偏原理如下:
隧道挖掘過程中某一時刻,盾構機掘進偏差超過限定值,此時盾構機軸線的方位角為α1,通過導向系統計算出此刻盾首或盾尾的坐標,糾偏距離為L(一般是根據經驗確定的,它是糾偏起始點與糾偏終點的連線在終點切線上的投影距離),利用設計中線數據可計算出糾偏結束時盾構機的軸線方位角α2以及盾首和盾尾的坐標。糾偏平面示意圖如圖1所示。
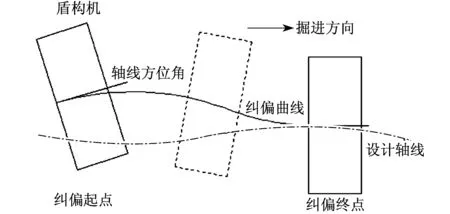
圖1 糾偏平面示意圖
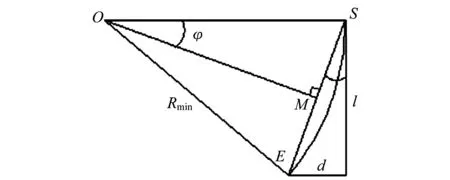
用切口(或盾尾)代替整個盾構機,上述過程表達為:已知糾偏前點為P1(x1,y1),切線方位角為α1;糾偏后點為P2(x2,y2),切線方位角為α2;P1P2的方位角為α3(如圖2所示)。過點P1作P2點切線的垂線,垂足點為N,則NP2為糾偏距離,用L表示;NP1為偏差,用△H表示。P1P2已知,由此可根據幾何關系計算得到L。
用兩個反向圓弧擬合出P1和P2之間的糾偏曲線P1AP2,A為切點,只要確定出圓弧的半徑,就可得到整個糾偏曲線的軌跡。

圖2 糾偏原理圖
設P1A和AP2段圓弧對應的圓心角分別為β1、β2,其圓心分別為O1、O2,O1O2與P1P2的交點為B。由幾何關系可知:
(1)
(2)
(3)
由于L、ΔH、α1和α2為已知值,因此根據式(1)、(2)、(3)可求解3個未知數,即可獲取糾偏半徑R。
2.2 最小糾偏半徑方法
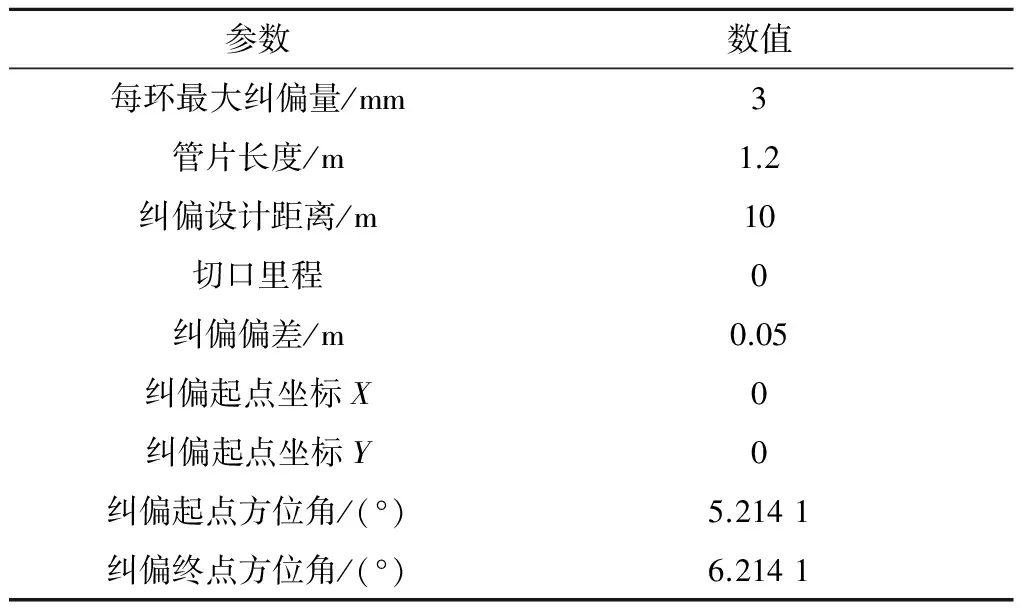
盾構隧道測量存在一些特殊的問題,例如,在糾偏過程中若糾偏曲線半徑較小,糾偏差超過了管環設計的楔形量,則會導致盾尾間隙不足,輕則加重盾構機向前推進的阻力、減緩掘進速度,重則將使管片錯臺甚至損壞[3]。解決這種問題的方法就是增大曲線半徑,減小曲率來保證有足夠的盾尾間隙。故本文提出糾偏過程必須滿足最小糾偏曲線要求。即根據管片設計確定一個最小糾偏半徑Rmin,當R Rmin由每環的管片長度l和楔形量d(即每環最大糾偏偏差)決定,三者的關系如圖3所示。其中,S表示每一環的糾偏起點,E表示每一環的糾偏終點,M表示中點。由幾何關系可得: (4) (5) (6) 則: (7) 圖3 最小糾偏曲線半徑的確定 最小糾偏半徑方法如圖4所示,其基本思想為:當R 圖4 最小糾偏半徑方法 最小糾偏半徑方法中,可通過糾偏曲線長度最小化來加快掘進進度,采用的方法為: (1) 若ΔH大于規范要求的偏差,則R取最小糾偏半徑,即R=Rmin。 (2) 若ΔH小于規范要求的偏差,R根據盾構機軸線與設計軸線夾角及規范要求的最大偏差ΔHmax進行計算,若R小于最小糾偏半徑,則R取最小糾偏半徑,即R=Rmin。 本文對提出的糾偏方法進行了試驗,已知數據如表1所示。 表1 糾偏時的已知數據 結合隧道設計中線及表1中的數據,采用本文的糾偏算法得到的理論糾偏半徑R=166.723 1 m,最小糾偏半徑Rmin=240.001 5 m。顯然,在10 m的糾偏距離內糾正誤差為0.05 m偏差的理論糾偏半徑小于最小糾偏半徑,即R 通過計算得出實際的糾偏距離為13.303 6 m。糾偏曲線上間隔距離為管片長度的特征點的坐標如表2所示,糾偏曲線如圖5所示。 表2 糾偏曲線坐標 由圖5可以看到,糾偏曲線兩段反向雙圓弧的切點處過渡相當平滑,且糾偏曲線最終回歸到設計線上,即成功實現了曲線糾偏過程。 本文從目前盾構隧道測量存在的問題出發,闡述了盾構隧道測量中需要對盾構路線進行糾偏的必要性,進而提出一種盾構隧道糾偏方法,并對該方法進行了試驗驗證。驗證結果表明了該糾偏方法在盾構隧道糾偏中的實用性和有效性,為盾構隧道施工中糾正盾構實際路線提供了解決方法和理論依據。 圖5 糾偏曲線圖 [1] 程驍,潘國慶.盾構施工技術[M].上海:上海科學技術文獻出版社,1990. [2] 宋瑞恒.盾構隧道通用管片排版與動態糾偏管理軟件開發[M].上海:上海交通大學出版社,2008. [3] 秦建設,朱偉,陳劍.盾構姿態控制引起管片錯臺及開裂問題研究[J].施工技術,2004,12(10):25-27. [4] 周振國,郭磊,郭衛社.盾構施工姿態控制和管片選型[J].西部探礦工程,2002(5):124-127. [5] 羅偉雄.盾構管片整環組合拼裝施工技術[J].城市軌道交通研究,2006,9(7):11-14. [6] 吳暐,羅良玲,田華.空間曲線擬合算法的研究[J].南昌大學學報,2004,26(3):38-40. [7] FERGUSON J.Multivariable curve interpolation[J].Journal ACM,1964,11(2):199-217. [8] 張彩明.高精度三次樣條曲線的構造[J].計算機學報,2002,25(3):263-265. [9] 錢一晨,陳虎娣.列表點雙圓弧樣條曲線擬合計算法[J].機械研究與應用,2012(3):19-22. [10] 程晨.雙圓弧逼近平面參數曲線的研究[J].現代機械,2004(5):28-29. [11] 董光昌,梁友棟,何援軍.樣條曲線擬合與雙圓弧逼近[J].應用數學學報,1978,1(4):330-340. On Calculation Method of Axis Deviation Correction in Shield Tunnel Construction WANG Yungang, XU Yanjun During shield construction of metro tunnel which is influenced by a variety of factors, the shield machine and the segment axis will frequently deviate the designed center line, sometimes the deviation may exceed the allowable range, thus cause safety hazards during the tunnel construction or train operation. To solve these problems existing in shield construction process, various factors that result in producing axis deviation are summarized, then an effective correction method is proposed. This method will provide a theoretical basis and technical support for shield tunnelling quality control. metro; shield tunnel; axis deviation; correction method U 455.43 10.16037/j.1007-869x.2017.01.017 2015-04-21)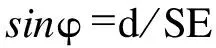
3 試驗結果

4 結語
 猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42流行色(2020年1期)2020-04-28 11:16:38兒童故事畫報(2019年5期)2019-05-26 14:26:14藝術啟蒙(2018年7期)2018-08-23 09:14:18海峽姐妹(2017年7期)2017-07-31 19:08:17Coco薇(2017年5期)2017-06-05 08:53:16意林原創版(2016年10期)2016-11-25 10:28:30Coco薇(2016年2期)2016-03-22 02:42:52Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長指南(2015年7期)2015-08-11 15:03:12
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42流行色(2020年1期)2020-04-28 11:16:38兒童故事畫報(2019年5期)2019-05-26 14:26:14藝術啟蒙(2018年7期)2018-08-23 09:14:18海峽姐妹(2017年7期)2017-07-31 19:08:17Coco薇(2017年5期)2017-06-05 08:53:16意林原創版(2016年10期)2016-11-25 10:28:30Coco薇(2016年2期)2016-03-22 02:42:52Coco薇(2015年1期)2015-08-13 02:47:34小雪花·成長指南(2015年7期)2015-08-11 15:03:12
