淺析幾何法在曲柄滑塊式襟翼機構設計中的應用
2017-03-08 06:03:04董萌
裝備制造技術 2017年12期
董 萌
(中國商飛上海飛機設計研究院,上海201210)
為使襟翼在飛機起飛、巡航、著陸過程中,處于氣動要求的指定位置,飛機襟翼的驅動機構設計型式有多種多樣,其中曲柄滑塊式機構是應用非常廣泛的一種(見圖1)。該型機構工作原理為:驅動器驅動搖臂轉動,使滑塊在滑軌上移動,襟翼與連桿固定在一起,隨著滑塊的移動,襟翼變換位置,滿足氣動設計要求。
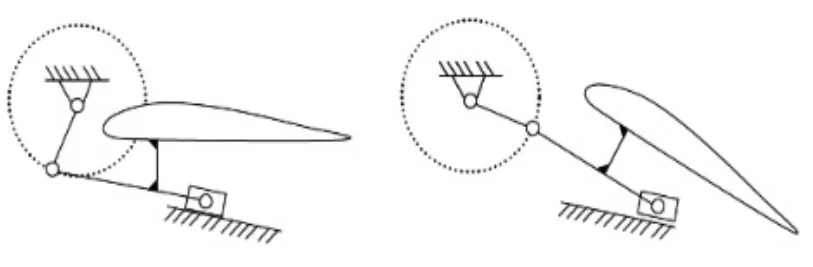
圖1 曲柄滑塊式襟翼機構
在民用飛機后緣襟翼機構設計中,往往已知飛機在起飛、巡航、著陸過程中各工況下的襟翼位置,本文以曲柄滑塊機構襟翼機構為例(見圖1),介紹幾何法在襟翼機構設計、確定襟翼位置中的應用。
1 幾何法原理[1]
曲柄滑塊機構OAC(見圖2)中,連桿AC從位置A1C1到A2C2所轉過的角度為θ,作A1A2和C1C2的垂直平分線na和nc,其交點P12為連桿相對機架從位置1轉到位置2的轉動極點。因ΔP12A1C1≌ ΔP12A2C2,故

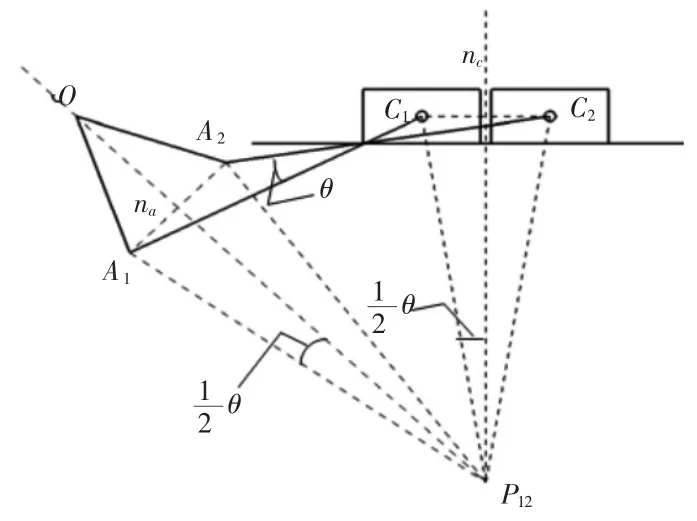
圖2 曲柄滑塊機構
基于上述關系,推論如下:
1)連桿AC(襟翼)上任意點均繞P12做定軸轉動,且P12點唯一;
2)曲柄與連桿鉸鏈點A1在與na夾角為的直線上;
3)連桿與滑塊鉸鏈點C1在與nc夾角為的直線上;
4)固定鉸鏈點O在na上;
5)滑軌平行于 C1C2,且垂直于 nc;
6)鉸鏈點A的位置1和位置2關于na對稱;
7)鉸鏈點C的位置1和位置2關于nc對稱。
2 幾何法求解曲柄滑塊式襟翼機構
在曲柄滑塊襟翼機構設計時,一般地以襟翼起飛、巡航、著陸時的姿態(tài)為輸入。即已知三個連桿位置且連桿鉸鏈點位置未知的情況,幾何作圖法求解機構過程如下,相關字符意義參考圖3.
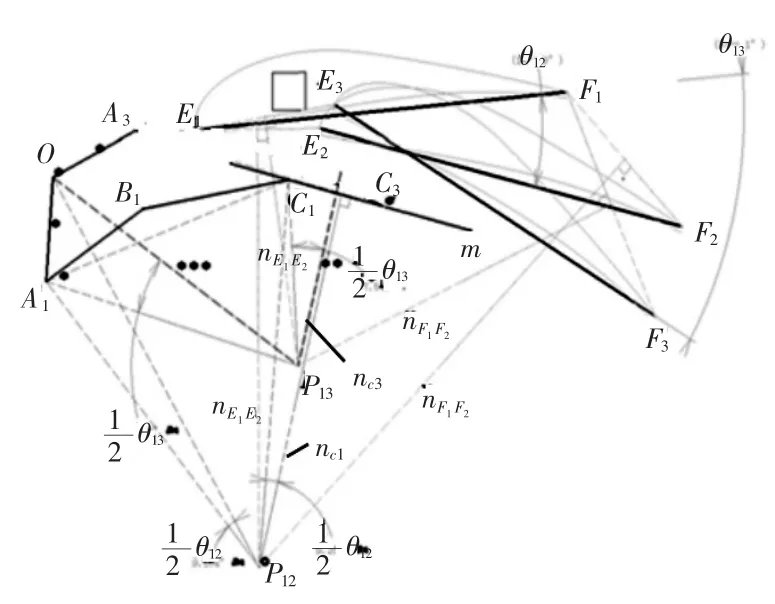
圖3 幾何作圖法求解曲柄滑塊機構
(1)用襟翼截面的翼弦表示襟翼在巡航、起飛、著陸時的位置,分別為E1F1、E2F2、E3F3各位置相對巡航時的轉角為 θ12、θ13;
(2)連接F1F2并作其垂直平分線nF1F2,連接E1E2并作其垂直平分線nE1E2,nF1F2和nE1E2的交點即為轉動極P12,作∠OP12A1=∠n P12C1=θ12;連接 F1F3并c1作其垂直平分線nF1F3,連接E1E3并作其垂直平分線nE1E3,nF1F3和 nE1E3的交點即為轉動極 P13,作∠OP13A2=∠n P13C2=θ13;
(3)固定鉸鏈點O即為la1、la2的交點,連桿鉸鏈點 B 即為 lb1、lb2的交點,滑塊鉸鏈點 C 即為 lc1、lc2、的交點,約束nc1、nc3相互平行,過C作ld1的垂線m即為滑塊的運動直線;
(4)在襟翼運動平面內新建草圖,創(chuàng)建位置1的點O、A、C、直線m、EF的投影并隔離,固定點O和直線m,創(chuàng)建OA和AC的長度約束,創(chuàng)建點C和直線m的相合約束,固連AC和EF,轉動OA,檢驗EF是否滿足巡航、起飛、著陸時的位置要求。
3 應用分析
民用飛機機翼多為后掠機翼,襟翼沿后梁布置,且后梁與機翼展向夾角較大,一般大于20°.當襟翼運動方向與后梁平面垂直時,襟翼運動為簡單的平面運動,上述方法求解的機構優(yōu)化后可直接使用。當襟翼要求與展向垂直的方向(即順氣流方向)運動時,因機翼后梁平面與運動平面存在不再垂直,襟翼的運動不再是平面運動,而是復雜的空間轉動和平動的疊加,上述方法確定機構,僅可滿足襟翼在順氣流平面內的位置要求,不能準確定位襟翼沿機翼展向的運動。
4 結束語
幾何法建立襟翼運動機構的線架模型,快捷并直觀,可清晰反映各鉸鏈點的變化規(guī)律。本文以曲柄滑塊機構為例,詳細闡述了幾何法在襟翼機構設計中的應用,并指出:
1)已知襟翼四個位置,則可唯一確定滑塊鉸鏈點C和滑塊的運動直線m的位置,固定鉸鏈點A和桿鉸鏈點B的位置不唯一,可結合空間及載荷傳遞要求進一步優(yōu)化;
2)該方法適用于機構運動平面垂直于機翼后梁的情況,不完全適用于襟翼順氣流運動的情況,針對順氣流運動的襟翼機構需開展進一步深入研究。
[1]成大先.機械設計手冊·單行本·機構[M].北京:化學工業(yè)出版社,2004.
