
35G高性能窄波平板雷達產品總體設計
2017-03-09 12:39:28何洪寧仝大偉
中國新通信 2017年2期
何洪寧+仝大偉
【摘要】 采用了多普勒效應原理:當目標靠近雷達時,反射信號的頻率高于發射機的頻率;反之,當目標遠離雷達時,反射信號的頻率低于發射信號的頻率,即可由信號發射與接收頻率的差值,從而計算得到目標的速度值。將中頻正交的兩路信號進行AD轉換,通過FFT對IQ信號從時域轉換到對應的頻域,求出其幅值和方向,最后確定目標的運動方向,并通過RS232信號傳輸到相應的上層平臺。
【關鍵詞】 多普勒效應 35GHz 窄波雷達 測速
一、多普勒效應
Radar(Radio Detection Ranging): 無線電探測和測距雷達是一種通過發射電磁波和接收回波,對目標進行探測和測定目標信息的設備。 當雷達發射一固定頻率的脈沖波對空掃描時,如果遇到活動目標,回波的頻率與發射波的頻率出現頻率差,稱為多普勒頻率。根據多普勒頻率的大小,可測出目標對雷達的徑向相對運動速度。
我們知道當目標與雷達站之間存在相對速度時,接收到回波信號的載頻相對于發射信號的載頻
因此,雷達只要能夠測量出回波信號的多卜勒,就可以確定目標與雷達站之間的相對速度。
35G高性能窄波平板雷達用于車輛監測是依據多普勒效應原理實現的。由雷達發出一束微波,遇被測目標(車輛)時微波被反射回來,再由雷達接收反射波。如果目標相對于雷達有徑向運動,反射波的頻率將與發射頻率發生差異,而這種差異的大小正比于目標與雷達的相對運動速度。于是,雷達通過檢測反射波頻率和發射波頻率的差,就可以計算出被測車輛的移動速度。
二、窄波束雷達
窄波束雷達被稱為窄波雷達,是因為其自身雷達發射波瓣角非常窄,也被稱之為單車道雷達測速儀,雷達有效測量范圍,只限定在一個車道,有效的避免了相鄰車道的車輛速度干擾,所以被稱之為單車道雷達,而其又被稱之為平板雷達,是用戶從外觀上給出的直觀的名稱,普通雷達的發射天線是喇叭型,而窄波束雷達測速儀的發射天線是平板型的,比起普通的寬波雷達,其優越性在于其能有效的避免相鄰車道車輛的速度干擾,確保執法取證的正確性、嚴肅性、唯一性。
三、測速算法系統設計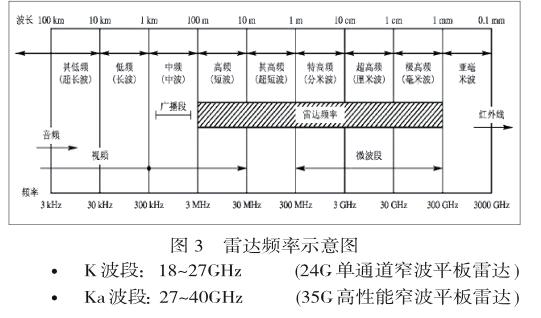
本項目采用的為ka波段,為35G高性能窄波平板雷達。
雷達天線的接收部分,對信號進行中頻放大,然后通過在中頻上面進行AD采樣,將采樣后的信號送入到TMS320F2812的DSP上面去,進行處理,得到的速度值通過RS232傳輸到相應的客戶端顯示出來,最終可以通過客戶端來查看到超速的速度值。
雷達是利用電磁波的二次輻射、轉發或目標固有輻射來探測目標,獲取目標空間坐標、速度、
特征等信息的一種無線電技術。其測速的原理是采用了多普勒效應(Doppler Effect)原理。
雷達信號處理方法:進行FFT變換,對噪聲和雜波進行處理,提取出目標,通過計算,得到目標速度,并運用相機對目標進行抓拍。
信號處理部分包括以下幾個步驟:
1、檢測信號是否飽和;如果信號太強,并且經過中頻放大之后,得到的信號處于飽和狀態,那么是無法對回波中的目標來進行判決的。2、將AD轉換之后的兩路數據,進行FFT變換,得到其頻率的相應的信息;通過調用庫中的FFT函數,來最大化的將雷達的結果進行搞定。3、根據采樣的數據得到噪聲的電平;通過求一組數據中的噪聲電平,來確定基本的判決門限;4、幀內目標的檢測;對雷達進行檢測,通過門限的判決來確定回波信號中是否存在著相應的目標。5、計算速度;通過得到的頻率來速度進行相應的計算。6、目標的幀間相關;通過前后兩幀的數據,來進行判斷是否有效;7、目標的輸出;通過RS232將得到的數據信息傳送到雷達的數據端上去。
最后輸出的車輛所超越的速度,以及超越速度的大小,通過RS232傳輸到相應的客戶端上面去。得到相應的信息。
核心功能模塊
高性能窄波平板雷達軟件主要有三個核心模塊:快速傅里葉變換模塊(將IQ兩路信號轉換到頻域)、幀內目標檢測模塊(檢測目標,并且進行目標的相關操作)、目標幀間相關模塊(通過幾幀抽樣數據確定目標速度)。
各個模塊工作原理
(1)FFT模塊:即快速傅里葉變換。在雷達接收模塊中,得到中頻正交的IQ兩路信號。運用
F2812的AD轉換模塊,將模擬的兩路正交信號采樣,得到數字IQ的正交信號。FFT的目的,將IQ兩路的離散時間數字信號,轉換到對應的頻域信號。通過分析頻域信號的一些信息,進而分辨出目標。FFT模塊是包含于F2812含有的TI庫,對1024個點進行轉換的時候,先進行排序,采用基2的轉換方式,計算的速度比普通的DFT要快上許多。通過FFT的轉換,然后計算出1024個點中的噪聲電平。將噪聲電平和FFT計算出的幅值,傳輸到下個目標模塊中去。
(2) 幀內目標檢測模塊:該模塊包含三個步驟,首先是對檢測目標,通過判決的門限,確定目
標的數目和相應的頻率值。然后對目標進行相關,確定兩個距離或者速度接近的目標,是否判斷為一個目標。最后是計算速度,通過雷達波的載頻,以及目標對應的頻率值,計算出各個目標的速度值。
(3) 目標幀間相關模塊:對輸入的目標,進行幀間相關處理,如果該目標與與已有的目標相關,
則更新該目標的輸出輸出,否則增加新的目標。最后輸出目標到目標輸出緩沖區,通過串口發送目標數據。
四、結論語
隨著車輛數量的不斷增加,交通事故發生的頻率也越來越高。十次事故九次快,絕大多數事故的主因都是超速。根據國際權威機構測算,機動車行駛速度每降一公里,交通事故可以減少3%。如果采用窄波雷達對車輛進行測速監控,可以預防因超速引起的道路交通事故,降低交通事故的發生概率。雷達測速儀可以對車速進行測量,對超速的車輛,進行抓拍或者現場提醒,從而達到減少交通事故,保障交通安全的目的,為和諧社會的建設產生有利的保障。
參 考 文 獻
[1] 賈興泉 連續波雷達數據處理[M]. 北京:國防工業出版社,2005.
[2] 劉國歲 隨機信號理論與應用[M]. 北京:兵器工業出版社,1992.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
