基于壓縮感知的進動目標ISAR成像方法
2017-03-12 06:42:07劉記紅徐少坤韓國強魏雁飛
雷達科學與技術(shù) 2017年4期
劉記紅, 徐少坤, 韓國強, 魏雁飛
(中國洛陽電子裝備試驗中心, 河南洛陽 471003)
0 引言
彈道目標識別是導彈攻防對抗勝負的關(guān)鍵環(huán)節(jié)。逆合成孔徑雷達(Inverse Synthetic Aperture Radar, ISAR)成像能夠反映目標的尺寸、結(jié)構(gòu)、形狀等特征[1],在雷達目標識別領(lǐng)域發(fā)揮著極其重要的作用,已成為彈道目標識別的主要途徑之一。對于彈道目標而言,除高速軌道運動外,通常還伴隨有自旋、進動等復雜的運動形式,大大增加了ISAR成像的難度。進動是彈道中段彈頭目標的重要物理特性之一,它使得目標姿態(tài)角呈現(xiàn)近似正弦規(guī)律的非均勻變化,目標上各散射點在距離上出現(xiàn)類似正弦曲線的距離走動,導致相應(yīng)的ISAR成像問題較為復雜,常規(guī)成像算法難以獲得高質(zhì)量的ISAR圖像[2]。
彈道目標成像問題是ISAR成像領(lǐng)域的研究熱點,由于軍事敏感性,國外相關(guān)的研究成果很少見諸報道,但可從零星的報道中獲知某些導彈防御雷達具備了彈頭ISAR成像能力。國內(nèi)的研究起步較晚,直到近些年才有少量的文獻出現(xiàn)。目前,用于進動目標的成像方法主要有基于時頻變換的方法[3-5]、基于復數(shù)逆投影的方法[6]、基于寬帶復數(shù)后向投影變換(Back Projection Transform, BPT)的方法[2]等。上述方法在一定條件下能夠獲得較好的成像結(jié)果,但對回波數(shù)據(jù)要求較高,成像性能敏感于目標的進動參數(shù),而在實際應(yīng)用過程中,獲取的數(shù)據(jù)段或目標進動參數(shù)往往難以滿足要求,如彈道目標的高速運動、反導系統(tǒng)雷達對多目標的跟蹤需求、導彈突防中的電子干擾措施等因素都可能導致無法獲得充足的觀測數(shù)據(jù),需要進一步研究利用有限脈沖回波數(shù)據(jù)進行彈道目標ISAR成像的方法。
近年來,壓縮感知(Compressed Sensing, CS)理論在高分辨雷達成像領(lǐng)域受到了越來越多的關(guān)注[7-9],其利用較少的測量數(shù)據(jù)即可重構(gòu)出雷達目標圖像的特性,為進一步完善傳統(tǒng)雷達成像技術(shù)提供了契機,也為彈道中段進動目標成像提供了一種新思路。文獻[10]將CS理論引入到目標微動特性分析中,獲取了目標回波的微多普勒時頻譜;文獻[11]研究了CS理論在含旋轉(zhuǎn)部件目標成像中的應(yīng)用,獲取該類目標主體部分的ISAR圖像。本文針對彈道中段進動目標的ISAR成像問題,在分析旋轉(zhuǎn)對稱進動目標回波模型的基礎(chǔ)上,充分利用雷達目標散射率分布的稀疏性先驗信息和目標的進動信息,提出了基于CS的進動目標成像算法,在降低脈沖重復頻率(Pulse Repetition Frequency, PRF)實際需求的同時,實現(xiàn)了進動目標的高分辨成像。
1 彈道中段進動目標回波模型
進動是一種自旋加錐旋的復合運動形式,彈道中段進動目標的運動模型如圖1所示,其中3個坐標系的建立方式同文獻[2],O為目標質(zhì)心,ωs,ωc分別為自旋和進動角頻率,目標進動軸ON在YOZ平面內(nèi),俯仰角為βN。假設(shè)初始時刻目標自旋軸(z軸)也位于YOZ平面內(nèi),Z軸與z軸之間的夾角為θ,則目標的進動角為γ=π/2-θ-βN。

圖1 雷達與空間進動目標幾何關(guān)系示意圖
彈道中段目標的形體結(jié)構(gòu)比較簡單,除少部分戰(zhàn)術(shù)彈道導彈外,彈頭及誘餌大都是旋轉(zhuǎn)對稱體。文獻[2]的分析表明,對于旋轉(zhuǎn)對稱體目標而言,自旋不會帶來散射場的變化,目標的三維姿態(tài)運動可以等效為在二維成像平面內(nèi)的旋轉(zhuǎn),轉(zhuǎn)動規(guī)律對應(yīng)目標的姿態(tài)角變化規(guī)律。將目標在三維空間的旋轉(zhuǎn)運動等效為在二維成像平面內(nèi)目標對稱軸繞點O的轉(zhuǎn)動,則等效旋轉(zhuǎn)角,即目標的姿態(tài)角為
α(t)=arc cos(cosγsinβN+sinγcosβNcosωct)
(1)
由于進動角較小,通常為5°~15°,對應(yīng)α(t)的變化范圍較小,可用直線方程近似,即
α(t)≈arc cos(sinβN+γcosβNcosωct)≈
(2)
式中,θc=π/2-βN為雷達觀測目標的平均視線角,它隨目標的軌道運動而變化,相對于微動帶來的姿態(tài)變化,θc的變化比較緩慢。
當將目標的進動等效為二維平面內(nèi)的轉(zhuǎn)動時,目標的等效散射中心模型也可等效到二維平面內(nèi)。設(shè)等效成像平面為Z′OY′,則在Z′OY′平面內(nèi)以α(t)為規(guī)律轉(zhuǎn)動的目標回波與進動狀態(tài)下的旋轉(zhuǎn)對稱目標回波等效。假設(shè)雷達發(fā)射線性調(diào)頻信號,目標共包含I個散射點,等效成像平面內(nèi)目標上第i個散射點的坐標為(zi,yi),散射強度為δi,則消除了平動影響的雷達目標回波可表示為


ΔRi(tm)=zicosα(tm)+yisinα(tm)
(4)


根據(jù)前述分析,目標的姿態(tài)角主要取決于其進動參數(shù),目前關(guān)于進動參數(shù)的估計算法有很多[12],若已經(jīng)得到目標的平均視線角和進動參數(shù),則可獲得目標的姿態(tài)角變化規(guī)律,進而基于式(5)重構(gòu)目標的二維圖像。由式(2)可知,進動使得中段目標的成像面臨如下問題: 1) 進動使得方位向的采樣間隔呈類正弦規(guī)律變化,期間目標姿態(tài)角在兩倍的進動角范圍內(nèi)非均勻變化,且不能用勻加速轉(zhuǎn)動模型進行等效; 2) 與高速自旋目標不同,由于進動角一般較小,進動過程中目標的姿態(tài)角變化范圍不大,基于窄帶信息的自旋目標成像方法[13]不適用于進動目標。
2 基于壓縮感知的進動目標成像
鑒于CS利用少量測量數(shù)據(jù)即可實現(xiàn)高分辨雷達成像的特點,這里將CS引入到旋轉(zhuǎn)對稱進動目標的ISAR成像中,其原理是基于目標回波信號的稀疏性,利用少量非相干測量通過非線性優(yōu)化重構(gòu)雷達目標圖像。
2.1 回波模型的線性化表征
雷達回波的稀疏性表征和模型的線性化處理是CS成像的先決條件。將成像區(qū)間離散化為P×Q的二維網(wǎng)格,每個網(wǎng)格點代表可能存在散射點的位置坐標(zp,yq),相應(yīng)位置處的散射強度表示為δpq(p=0,1,…,P-1,q=0,1,…,Q-1)。離散間隔大小決定了重構(gòu)圖像的分辨率,當某一個網(wǎng)格交點的坐標(zp,yq)上存在等效散射中心時,此網(wǎng)格點上的散射強度δpq≠0;反之,δpq=0。由于目標所涵蓋的僅是一部分網(wǎng)格交點,且目標僅包含有限個等效散射中心,PQ個網(wǎng)格交點中絕大多數(shù)位置上都不存在散射中心,因此目標散射率分布具有很強的稀疏性。
假設(shè)距離向的采樣點數(shù)為N(N≤P),對應(yīng)的基頻采樣點為fn(n=0,1,…,N-1),方位向用于成像的脈沖數(shù)為M(M≤Q),則根據(jù)式(5)可構(gòu)造進動目標的觀測矩陣如下:
Φ=[Φ(0),Φ(1),…,Φ(M-1)]
(6)


設(shè)Y為測得的N×M維的回波數(shù)據(jù)矩陣,δ=[δpq]P×Q為目標的二維散射率分布矩陣,按列堆疊后的矢量化表示形式分別為y=vec(Y)和σ=vec(δ),則式(5)可表示為如下矩陣形式:
y=Φσ
(7)
2.2 雷達圖像形成
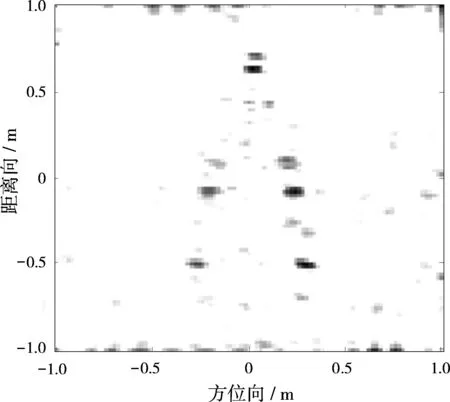
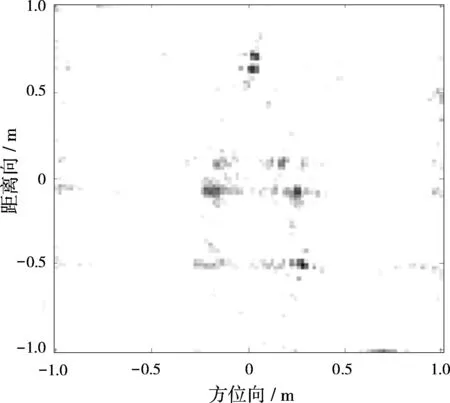
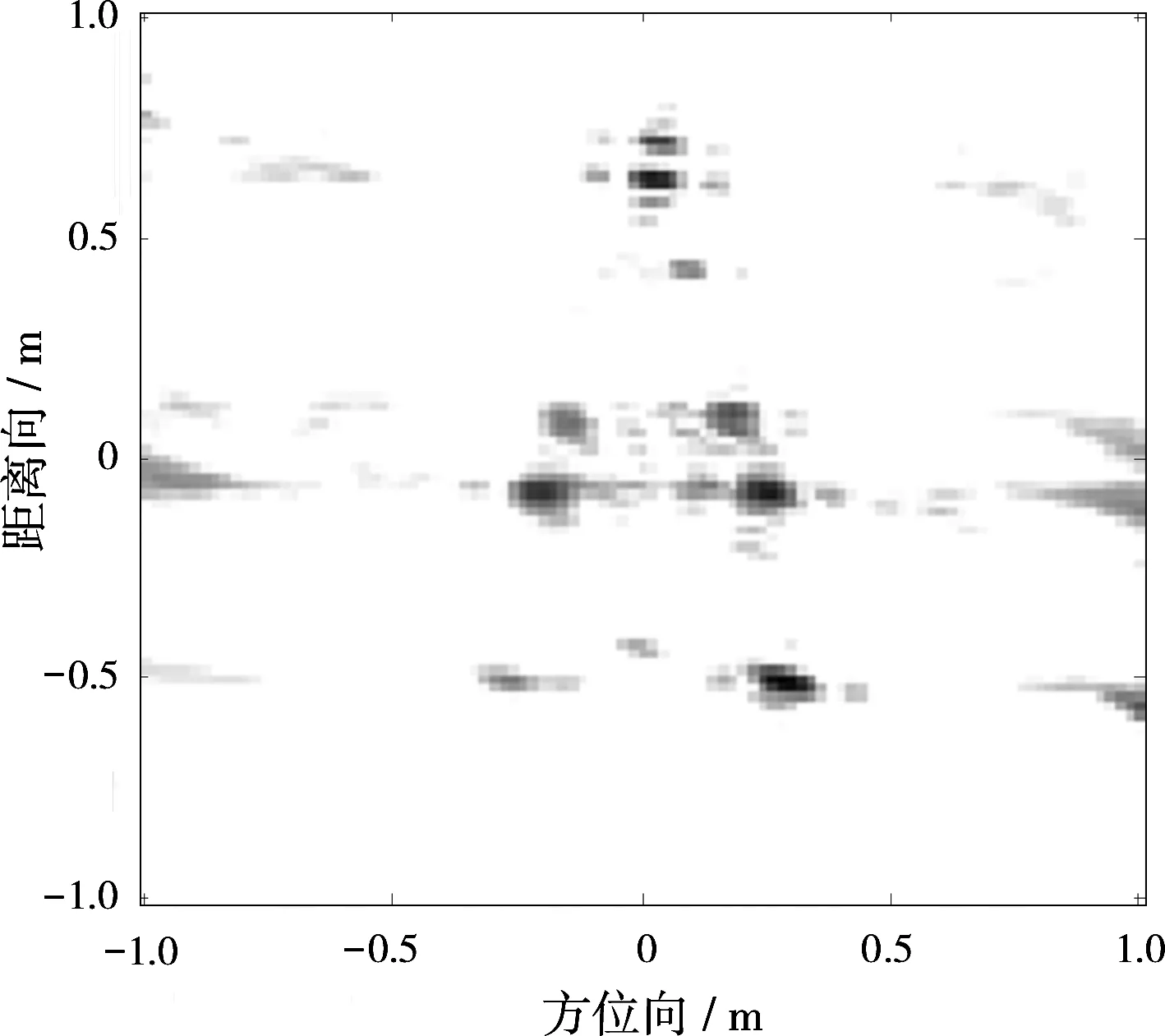
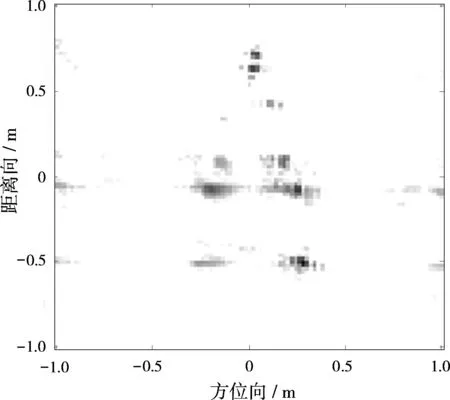
根據(jù)CS理論,當式(7)中的Φ滿足一定條件[8]時,通過非線性優(yōu)化即可重構(gòu)σ,進而通過重排得到目標的二維圖像。該方法的優(yōu)勢在于,能夠克服方位向非均勻采樣的影響,保證角度變化范圍較小情況下的成像分辨率,且當PRF不滿足Nyquist采樣準則而使回波產(chǎn)生欠采樣時依然有效。值得注意的是,此時測量矩陣Φ的維數(shù)較高(MN×PQ),將在計算中占據(jù)大量的存儲空間,而且大矩陣的乘法和求逆運算計算量較大,使得算法整體復雜度較高。事實上, CS重構(gòu)過程中無需采用所有的回波數(shù)據(jù),可對雷達回波進行降采樣處理。假設(shè)距離向隨機采樣K點,方位向獲得的脈沖回波數(shù)為L(K 上述方法通過CS算法實現(xiàn)了進動目標雷達圖像的二維聯(lián)合重構(gòu),所需的存儲量和計算量較大。根據(jù)觀測矩陣元素的構(gòu)造過程可知,目標散射率在方位向和距離向的分布均與目標姿態(tài)角(慢時間)耦合在一起,無法得到觀測模型的解耦形式,不能通過距離向和方位向分別重構(gòu)的方式降低算法的復雜度。為進一步降低所提成像算法的存儲需求,可利用每個測量頻點的信息分別進行重構(gòu),然后對各個頻點的重構(gòu)結(jié)果進行相干疊加,進而通過重排得到目標的高分辨ISAR圖像,這里稱之為“分頻處理方法”。 yn=Φnσ (8) 通過CS算法求解式(8)可得到第n個測量頻點處的重構(gòu)結(jié)果,對各個頻點數(shù)據(jù)執(zhí)行相同的操作,然后疊加合成重構(gòu)結(jié)果,即可得到清晰的目標ISAR圖像。 從理論上講,所提基于CS的進動目標成像算法充分利用了雷達目標散射率分布的稀疏性先驗信息和目標的進動信息,通過少量回波數(shù)據(jù)即可實現(xiàn)進動目標的高分辨成像,有效降低了進動目標成像所需的PRF,提高了數(shù)據(jù)利用率,付出的代價是重構(gòu)過程復雜度的增加。從成像質(zhì)量上來看,二維數(shù)據(jù)聯(lián)合處理的重構(gòu)模型與雷達觀測模型較匹配,性能相對穩(wěn)定,能獲得較理想的成像結(jié)果;分頻處理方法將各個頻點測量數(shù)據(jù)分別處理,忽略了各頻點回波數(shù)據(jù)間的耦合效應(yīng),在相同測量條件下圖像質(zhì)量將有所損失。 從資源需求和運算復雜度上看,以運算效率較高的SL0算法[14]為例,二維聯(lián)合成像算法需要的總存儲量為O(KLPQ),每次迭代運行時間為O(KLPQ),總的計算復雜度為O(JL0KLPQ),其中J=O(1),L0=O(1)分別表示外層和內(nèi)層循環(huán)次數(shù);分頻處理方法需要的存儲量為O(LPQ),每個頻點每次迭代重構(gòu)的時間復雜度為O(LPQ),共計重復K次,故總的運行時間為O(JL0KLPQ),與二維聯(lián)合成像算法在一個量級上。可見,在同等測量條件下,二者的運算開銷大致相同,但二維聯(lián)合處理方式需要更多的存儲空間。實際中,彈道中段進動目標的形體較小且結(jié)構(gòu)簡單,上述兩種成像處理方法均是可行的。 實驗中利用仿真數(shù)據(jù)和暗室合成數(shù)據(jù)驗證了所提成像算法的有效性,由于篇幅限制,這里僅給出暗室數(shù)據(jù)結(jié)果。暗室測量目標的外形尺寸如圖2所示,測量掃頻范圍為8~12GHz,掃頻間隔20MHz,目標姿態(tài)為俯仰角0°,方位角0°~90°變化(鼻翼方向為0°),變化間隔為0.2°。選用8~12GHz頻段和相應(yīng)姿態(tài)下的測量數(shù)據(jù)合成進動目標的回波,從而驗證所提CS成像算法的性能,CS方法重構(gòu)過程中采用SL0算法。合成參數(shù)設(shè)置如下:目標起始姿態(tài)角為0°,進動周期為1s,雷達信號帶寬B=4 GHz,測量頻點數(shù)N=201,PRF為500 Hz,先后合成進動角為5°和10°時的目標回波,成像過程中采用一個進動周期內(nèi)的回波數(shù)據(jù)。 圖2 暗室測量目標外形尺寸圖 圖3給出了進動角為10°時合成進動目標回波的距離壓縮結(jié)果和常規(guī)距離-多普勒(Range-Doppler, RD)算法成像結(jié)果。可見,進動目標的距離-慢時間域回波具有一定的周期性,合成數(shù)據(jù)反映了進動目標的姿態(tài)變化規(guī)律,常規(guī)的RD算法無法獲得清晰的ISAR圖像。 (b)RD成像結(jié)果圖3 暗室合成進動目標距離-慢時間域回波及RD成像結(jié)果 為驗證所提CS成像方法的有效性,并與現(xiàn)有的BPT方法進行比較,對目標進動角γ=5°,10°的情況,分別先后采用BPT方法、二維數(shù)據(jù)聯(lián)合處理的CS方法和分頻處理的CS方法進行成像,結(jié)果如圖4、圖5所示。其中,圖示結(jié)果的動態(tài)范圍取為30 dB,為便于存儲和計算, CS方法重構(gòu)過程中對回波數(shù)據(jù)進行了降采樣,距離向隨機采樣31個頻點,方位向進行19倍的均勻降采樣,分頻處理方式未對距離向進行降采樣。 (a)γ=5° (b)γ=10°圖4基于BPT的進動目標成像結(jié)果 (a)二維聯(lián)合處理(γ=5°) (b)二維聯(lián)合處理(γ=10°) (c)分頻處理(γ=5°) (d)分頻處理(γ=10°)圖5基于CS的進動目標成像結(jié)果 從重構(gòu)結(jié)果可以看出, BPT方法和CS方法均能夠有效地對進動目標成像。相比之下,BPT方法的成像結(jié)果具有較高的旁瓣和較多的背景雜波,且對進動角大小較為敏感;CS方法特別是二維聯(lián)合處理的成像結(jié)果清晰地反映了目標的散射點分布,具有較好的旁瓣抑制能力,成像性能受進動角大小的影響較小,且適用于獲得數(shù)據(jù)十分有限的情況;分頻處理的CS成像質(zhì)量略低于二維聯(lián)合處理方法,這是因為它割裂了各采樣頻點數(shù)據(jù)間的相關(guān)性,與理論分析一致。 為分析帶寬對成像性能的影響,圖6給出了合成回波數(shù)據(jù)帶寬為2 GHz(9~11 GHz)、目標進動角為10°情況下的成像結(jié)果。可以看出, BPT方法的成像性能受帶寬影響較大,這是由于它在重構(gòu)過程中利用的是目標的一維距離像信息,受sinc函數(shù)主瓣寬度的影響,帶寬越小影響越大。相比之下, CS方法利用的是目標的回波數(shù)據(jù),盡管成像質(zhì)量也隨著帶寬的降低有所下降,但仍較為準確清晰地反映了目標的二維散射率分布。 (a)BPT方法 (b)CS方法(二維聯(lián)合處理)圖6帶寬2 GHz條件下的進動目標成像結(jié)果 此外,實驗過程中發(fā)現(xiàn),一味地增加CS重構(gòu)所用的樣本數(shù)并不一定能改善成像質(zhì)量,相反可能導致成像結(jié)果的嚴重失真。分析原因可知,與高速自旋目標不同,由于進動角較小,進動目標的姿態(tài)角變化范圍相對較小,當采樣較密時,稀疏字典的原子間可能具有較高的相似性,使得重構(gòu)性能對噪聲非常敏感,只有在高信噪比下才能獲得較好的重構(gòu)結(jié)果;當采樣較疏時,稀疏字典原子間的相似性較低,重構(gòu)性能對噪聲更為穩(wěn)健。 以彈道中段彈頭目標為代表的進動目標成像是ISAR成像研究的一個重要方面。本文在詳細分析彈道中段進動目標電磁散射特性的基礎(chǔ)上,研究了基于壓縮感知的進動目標成像算法。首先提出了基于二維數(shù)據(jù)聯(lián)合處理的CS成像方法,然后針對該方法重構(gòu)過程中存在的存儲空間需求較大的問題,提出了基于分頻處理的進動目標成像方法,對兩種算法的性能進行了分析比較,通過暗室合成數(shù)據(jù)驗證了所提方法的有效性。與現(xiàn)有方法相比,所提方法不僅可以在少量數(shù)據(jù)條件下實現(xiàn)進動目標的高分辨成像,充分改善了成像質(zhì)量,而且提高了對目標進動參數(shù)的穩(wěn)定性。 [1]金勝,朱天林. ISAR高分辨率成像方法綜述[J]. 雷達科學與技術(shù), 2016, 14(3):251-260. JIN Sheng, ZHU Tianlin. A Review of High-Resolution Inverse Synthetic Aperture Radar Imaging Methods[J]. Radar Science and Technology, 2016, 14(3):251-260.(in Chinese) [2]胡杰民. 復雜運動目標高分辨雷達成像技術(shù)研究[D]. 長沙:國防科學技術(shù)大學, 2011. [3]DING Xiaofeng, FAN Meimei, WEI Xizhang, et al. Narrowband Imaging Method for Spatial Precession Cone-Shaped Targets[J]. Science China Technological Sciences, 2010, 53(4):942-949. [4]WANG Tao, WANG Xuesong, CHANG Yuliang, et al. Estimation of Precession Parameters and Generation of ISAR Images of Ballistic Missile Targets[J]. IEEE Trans on Aerospace and Electronic Systems, 2010, 46(4):1983-1995. [5]PAN Xiaoyi, WANG Wei, LIU Jin, et al. Modulation Effect and Inverse Synthetic Aperture Radar Imaging of Rotationally Symmetric Ballistic Targets with Precession[J]. IET Radar, Sonar & Navigation, 2013, 7(9):950-958. [6]胡曉偉,童寧寧,王建業(yè),等. 基于組網(wǎng)雷達的空間旋轉(zhuǎn)對稱進動目標三維重構(gòu)[J]. 系統(tǒng)工程與電子技術(shù), 2016, 38(10):2281-2286. HU Xiaowei, TONG Ningning, WANG Jianye, et al. Three-Dimensional Reconstruction for Spatial Precession Targets with Rotational Symmetry in Radar Networks[J]. Systems Engineering and Electronics, 2016, 38(10):2281-2286.(in Chinese) [7]ZHANG Shunsheng, Zhang Wei, ZONG Zhulin, et al. High-Resolution Bistatic ISAR Imaging Based on Two-Dimensional Compressed Sensing[J]. IEEE Trans on Antennas and Propagation, 2015, 63(5):2098-2111. [8]李少東,楊軍,陳文峰,等. 基于壓縮感知理論的雷達成像技術(shù)與應(yīng)用研究進展[J]. 電子與信息學報, 2016, 38(2):495-508. [9]SUN Chao, WANG Baoping, FANG Yang, et al. High-Resolution ISAR Imaging of Maneuvering Targets Based on Sparse Reconstruction[J]. Signal Processing, 2015, 108(1):535-548. [10]葉淋美. 基于壓縮感知的雷達信號處理應(yīng)用研究[D]. 廈門:廈門大學, 2014. [11]LIU Hongchao, JIU Bo, LIU Hongwei, et al. A Novel ISAR Imaging Algorithm for Micromotion Targets Based on Multiple Sparse Bayesian Learning[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(10):1772-1776. [12]洪靈,戴奉周,劉宏偉. 基于三維重構(gòu)的空間目標進動參數(shù)估計方法[J]. 電波科學學報, 2015, 30(2):237-243. [13]王保平,方陽,孫超,等. 壓縮感知窄帶自旋目標雷達成像[J]. 遙感學報, 2015, 19(2):254-262. WANG Baoping, FANG Yang, SUN Chao, et al. Narrowband Radar Imaging for Spinning Targets Based on Compressed Sensing[J]. Journal of Remote Sensing, 2015, 19(2):254-262.(in Chinese) [14]MOHIMANI H, BABAIE-ZADEH M, JUTTEN C. A Fast Approach for Overcomplete Sparse Decomposition Based on Smoothed0Norm[J]. IEEE Trans on Signal Processing, 2009, 57(1):289-301.
3 算法性能分析
4 仿真實驗及分析



5 結(jié)束語
猜你喜歡
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56