一種基于STM32的微型四旋翼飛行器硬件設計方案
2017-03-15 07:34:01尹項博張亞明王珂馬浩洋蘇一凡
中小企業管理與科技·下旬刊 2017年2期
尹項博 張亞明 王珂 馬浩洋 蘇一凡

摘 要:四旋翼飛行器以其優良的氣動能力與便攜性越來越受到學術界的重視,但是市面上成熟的四旋翼飛行器體積較大且價格昂貴,本設計旨在解決目前民用四旋翼飛行器價格高昂,體積大的問題,利用小功率電機與STM32系列微控制器完成四旋翼的基本系統搭建,做到四旋翼的基本功能,并且可以通過上位機控制與規劃四旋翼的飛行路線與方案。
關鍵詞:四旋翼飛行器;低成本;小體積
中圖分類號: V275.1 文獻標識碼: A 文章編號: 1673-1069(2017)06-162-2
1 四旋翼發展現狀
1.1 四旋翼的簡介
不同于平時乘坐的波音客機與常見的戰斗機等固定翼飛機,四旋翼飛行器是一種不穩定,欠驅動的飛行系統,四旋翼飛行器在啟動后無法像固定翼飛機一樣自動對抗氣流干擾,同時由于四旋翼飛行器的四個螺旋槳只能提供向上的升力,所以四旋翼飛行器如果在升空后不加以控制,只需一陣風就可以吹翻飛行器。
1.2 四旋翼的發展歷史及發展現狀
由于四旋翼飛行器的不穩定性與欠驅動性[1],四旋翼通常需要搭載姿態控制模塊用于實時控制當前的飛行姿態,防止失控的發生,同時也必須搭載慣性導航系統用于提供飛行器當前的姿態信息。然而在20世紀,陀螺儀的體積普遍過大,直到20世紀90年代后,出現了幾克重的MEMS(微機電系統,Micro-Electro-Mechanical System)慣性導航系統[2],四旋翼的姿態控制問題才有了初步的發展。
在MEMS慣性導航芯片出現后,由于其傳出數據的雜波與干擾較大,人們又花了大量時間研究慣性導航的算法,然而復雜的算法就對機載微處理器的運算速度提出了要求,于是直到2005年前后,四旋翼飛行器才正式問世。
如今,四旋翼技術已經十分成熟,也逐漸開始了商業化,在航空拍攝、地質探測等領域發揮了極其重要的作用。
2 經濟化與小體積化設計原則
2.1 常見四旋翼飛行器的重量比較
2.1.1 商業公司成品四旋翼飛行器
目前商業公司的成品四旋翼飛行器根據其功能不同,體積也大小不一,通常最常見的航拍型飛行器重量在1kg以上,而目前的大型多旋翼飛行器更可以重達5kg,較大的體積會對電機的轉速提出更多的要求,加快電池的消耗,同時也會增大電池的體積。
2.1.2 DIY組裝飛行器
當下的DIY組裝飛行器主要還是受制于機架的大小與重量,通常來說,DIY機架的軸長多在70cm之內,采用碳纖維材料來減輕機架的重量,然而即使是采用了碳纖維材料,由于電池與電調的存在,其整機重量仍然在1kg以上,并且若要加掛云臺則需要更大的機架空間。
2.2 經濟化與小體積化設計方案
2.2.1 控制器部分
控制器是四旋翼飛行器的核心部分,主要負責解算四旋翼當前的飛行姿態,維持四旋翼飛行穩定,處理地面站或者遙控器給出的飛行指令,或者控制四旋翼按照預設的航線飛行,并且可以將攝像頭采集到的數據轉存到存儲設備中。
2.2.2 慣性導航部分
慣性導航部分主要提供飛行器在某一時間上在三個軸向上的加速度,并將數據發送給控制器,控制器可以根據接收到數據解算飛機當前的飛行姿態,并且,由于MEMS慣性導航模塊的數據存在許多干擾與雜波,所以需要設計濾波算法,目前較為常見的濾波算法為卡爾曼濾波算法(Kalman filtering),卡爾曼濾波利用線性系統狀態方程,通過觀測系統輸入輸出得到的數據,對系統狀態進行最優估算。由于其主要用途是去除噪聲與雜波干擾,所以其估算過程可以大概地認作濾波過程。
2.2.3 通信部分
通信部分主要負責接受控制器的信號,并且將四旋翼飛行器的當前狀態傳送回上位機,便于地面站進行數據分析與圖像處理。
2.2.4 電機
為了減輕能量消耗與縮減體積,本設計放棄了通常四旋翼上的大功率無刷電機,而是使用空心杯電機作為動力的來源,空心杯電機在結構上與傳統電機最大的不同就是采用無鐵芯轉子,采用這種轉子可以完全消除由鐵芯形成的渦流對電機的影響。空心杯電機主要具有以下特性:
能量轉換效率高,較好的空心杯電機的能量轉換效率可以達到90%以上,較一般的產品也可以達到70%左右的能量轉換效率。
控制靈敏,空心杯電機可以達到28ms的機械響應時間,啟動與制動都極其迅速,當其處于高速轉動時,也可對其轉速進行精確的調節。
穩定性可靠,空心杯電機在轉動時的轉速誤差一般不超過2%,完全滿足四旋翼控制的需要。
2.2.5 電源部分
電源部分主要為電壓轉換模塊與電池構成,為了減輕體積,此設計選擇了低容量的鋰電池供電,因為空心杯電機的能量消耗較低,使用較低功耗的鋰電池也可以保證長時間的飛行。
2.2.6 機架
機架是傳統四旋翼必不可缺的部分,同時也是產生重量最主要的部分,本設計完全拋棄了傳統的機架設計,利用電路板自身的強度作為載體,可以搭載一微型攝像頭,用于采集視頻信息。
3 詳細硬件設計方案
3.1 系統整體設計方案與布局
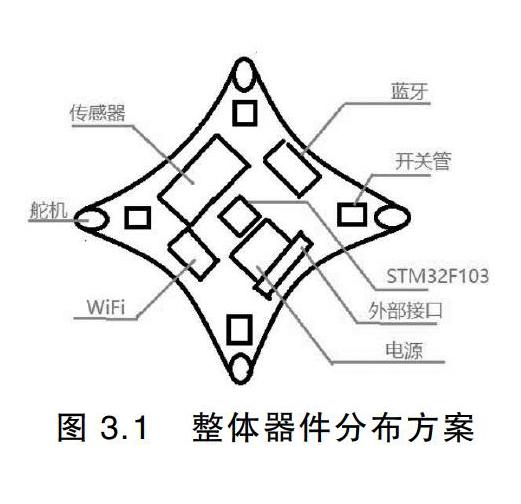
鑒于采用盡可能小的設計方案,所以對于電路板的器件布置位置提出了要求,器件的擺放應該盡可能密集,同時,為了增加結構強度,減少風阻,整體PCB的形狀應該是梅花狀,而不是常見的長方形設計,綜上所述,圖3.1給出了一簡要的器件分布方案。
3.2 控制器設計方案
控制器部分使用STM32F103C8T6單片機,其主頻為78MHz,通過外接一8MHz晶振進行9倍倍頻可以達到單片機推薦的晶振頻率。此部分使用3.3V電源供電,其對外提供了2路I2C接口,2路USART接口,足以滿足外部設備的使用需求,其核心控制部分電路如圖3.2所示。
3.3 傳感器模塊設計
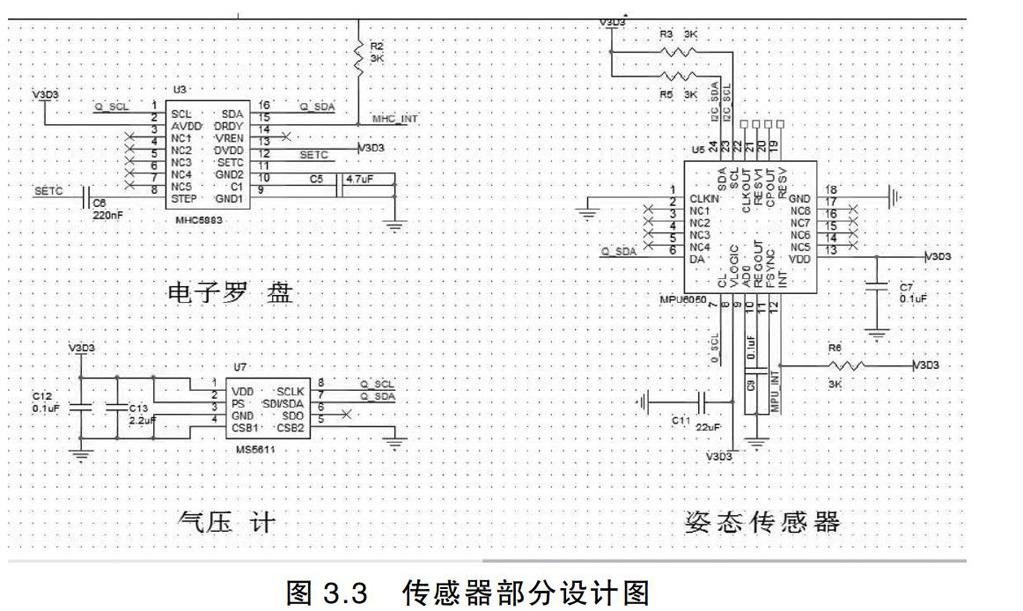
為了同時兼顧高度與運動方向的檢測,本設計使用了一顆氣壓計與一顆六軸加速度傳感器,以及一顆電子羅盤,可以提供水平方向的機頭朝向信息,氣壓計選擇了MS5611,MS5611為一顆I2C接口的高精度大氣壓傳感器,可以返回當前的海拔。電子羅盤了選擇了MHC5883三軸數字羅盤,其使用I2C接口,精度控制在1°-2°,完全滿足四旋翼導航的需要。六軸傳感器使用了MPU6050,其為I2C接口,可以提供六個方向上的加速度數據。
傳感器部分的設計圖見圖3.3。
3.4 舵機模塊設計
升力用空心杯電機提供,其電路設計中使用一MOS門提供3.7V的電壓,利用STM32內置的定時器生成PWM波形,由于STM32輸出電壓為3.3V,無法驅動電機,所以使用一MOS門進行控制,其整體電路設計數據透傳模塊說明Wifi模塊與藍牙模塊可以根據需要進行切換,當需要遙控器進行控制時,可以使用藍牙模塊進行通信,當使用計算機作為地面站進行控制時,可以選擇WiFi模塊進行控制,兩者之間可以通過單片機使能電源芯片進行切換。
4 結論
經過實際組裝,本設計全部器件的市場價格總和可以控制在120元以內,尺寸比同類產品小60%以上,完全達到了最初的設計目標。
參 考 文 獻
[1] 吳桐.四旋翼飛行器的控制設計和硬件在環仿真實驗平臺開發[D].上海交通大學,2015.
