基于設(shè)備結(jié)構(gòu)分解的可視化故障推理與診斷技術(shù)研究
2017-03-21 13:09:10戴耀,馬野,王振
計(jì)算機(jī)測(cè)量與控制 2017年2期
戴 耀,馬 野,王 振
(海軍大連艦艇學(xué)院 信息作戰(zhàn)系,遼寧 大連 116018)
基于設(shè)備結(jié)構(gòu)分解的可視化故障推理與診斷技術(shù)研究
戴 耀,馬 野,王 振
(海軍大連艦艇學(xué)院 信息作戰(zhàn)系,遼寧 大連 116018)
針對(duì)復(fù)雜設(shè)備故障診斷與裝備本身結(jié)構(gòu)無(wú)法直觀對(duì)應(yīng)進(jìn)行故障原因的自動(dòng)推理和快速定位問(wèn)題,研究了基于設(shè)備結(jié)構(gòu)分解的可視化故障推理與診斷技術(shù);通過(guò)定義熱區(qū)和熱區(qū)索引,將故障推理與診斷同設(shè)備結(jié)構(gòu)分解相對(duì)應(yīng),在診斷的過(guò)程中構(gòu)建了故障自動(dòng)推理編碼規(guī)則,可將故障樹(shù)轉(zhuǎn)換成一系列可操作的且具有一定邏輯關(guān)系的編碼,并通過(guò)軟件編程將編碼以故障現(xiàn)象的表現(xiàn)形式呈現(xiàn)給排故人員,實(shí)現(xiàn)故障的自動(dòng)推理與實(shí)際裝備部件圖相互結(jié)合;該方法能夠按照推理步驟逐層對(duì)裝備進(jìn)行LRU級(jí)分解展開(kāi),真正實(shí)現(xiàn)可視化故障自動(dòng)推理和診斷;通過(guò)某型電子裝備進(jìn)行故障推理實(shí)例驗(yàn)證,表明該方法層次結(jié)構(gòu)清晰,推理簡(jiǎn)單有效,能夠?qū)崿F(xiàn)裝備可視化的LRU級(jí)分層故障診斷和故障的快速定位。
故障診斷;可視化;LRU級(jí)分解;自動(dòng)推理機(jī);故障編碼
0 引言
常用的故障診斷技術(shù)往往與裝備本身結(jié)構(gòu)無(wú)法一一對(duì)應(yīng)[1-2],即經(jīng)常按照一定規(guī)則或者專(zhuān)家的經(jīng)驗(yàn)給出相應(yīng)的結(jié)論[3-6],而從故障邏輯結(jié)構(gòu)出發(fā),逐層展開(kāi)自動(dòng)推理,則可以解決復(fù)雜設(shè)備故障診斷問(wèn)題[7-8]。基于設(shè)備結(jié)構(gòu)分解的故障推理,是將裝備故障樹(shù)轉(zhuǎn)換成可自動(dòng)操作的編碼,將編碼存儲(chǔ)在數(shù)據(jù)庫(kù)中,通過(guò)制定與設(shè)備結(jié)構(gòu)相對(duì)應(yīng)的編碼規(guī)則和推理規(guī)則,按照故障現(xiàn)象和故障結(jié)果兩種形式,逐層展開(kāi),最終進(jìn)行故障定位,給出診斷結(jié)果。該方法在診斷時(shí)可將故障定位到LRU級(jí)部件,提高了設(shè)備故障診斷的實(shí)時(shí)性和容錯(cuò)性,能有效地解決隨機(jī)故障的診斷問(wèn)題。
為了增強(qiáng)故障診斷的直觀性和維修的便捷性,人們往往希望在故障診斷時(shí)能進(jìn)行可視化推理,即用點(diǎn)擊實(shí)際裝備LRU級(jí)部件圖形鏈接的方式,以可能出現(xiàn)故障現(xiàn)象的各個(gè)部件做牽引,根據(jù)故障推理的邏輯關(guān)系將設(shè)備結(jié)構(gòu)逐層分解,分層次顯示部件分解圖像,最后進(jìn)行故障定位。由于在推理過(guò)程中,需將實(shí)際裝備由大到小,從整體到局部進(jìn)行分解,顯示清楚各層邏輯關(guān)系,因此,首先必須按照可能出現(xiàn)的故障原因,設(shè)定相應(yīng)的熱區(qū),以便逐層展開(kāi)。
1 交互式故障分解
1.1 熱區(qū)及熱區(qū)索引
所謂熱區(qū),就是可能發(fā)生故障的區(qū)域,一般用包含裝備部件圖形的矩形框表示[9]。為了能激活熱區(qū),必須對(duì)熱區(qū)4個(gè)位置坐標(biāo)進(jìn)行定義[10],位置坐標(biāo)的選擇是根據(jù)鼠標(biāo)的實(shí)時(shí)位置確定的,選擇熱區(qū)邊框4個(gè)角所在位置的坐標(biāo),存儲(chǔ)在數(shù)據(jù)庫(kù)中,以備后續(xù)推理使用。
熱區(qū)索引是進(jìn)行故障推理以及裝備按照推理進(jìn)行分解展開(kāi)的關(guān)鍵。索引編碼涉及到三個(gè)主要要素,一是編碼長(zhǎng)度,代表索引層,即裝備結(jié)構(gòu)展開(kāi)層,表示按照邏輯關(guān)系已經(jīng)分解的層數(shù);二是字符串個(gè)數(shù),代表對(duì)應(yīng)上一層父節(jié)點(diǎn)下子節(jié)點(diǎn)個(gè)數(shù),即可能出現(xiàn)故障的部位數(shù),也就是熱區(qū)個(gè)數(shù);三是尾字母,根據(jù)26個(gè)英文字母所在位置,對(duì)每個(gè)尾字母進(jìn)行排序,確定對(duì)應(yīng)的熱區(qū)展開(kāi)的順序。
如表1所示編碼。第一層為根結(jié)點(diǎn),用A、B表示,字符串長(zhǎng)度為1,表示第一層根節(jié)點(diǎn)有兩個(gè)可能故障部件,即包含兩個(gè)熱區(qū),首先從A進(jìn)行推理。第二層A下包含3個(gè)熱區(qū),用AA、AB、AC表示,尾字母A、B、C表示可能的推理順序。第三層AA根節(jié)點(diǎn)下包含兩個(gè)熱區(qū),用AAA、AAB表示,尾字母A、B表示可能的推理順序。以此類(lèi)推,按照故障樹(shù)進(jìn)行相應(yīng)的熱區(qū)索引編碼。

表1 熱區(qū)索引編碼
1.2 交互規(guī)則
交互式故障推理是按照故障現(xiàn)象可能出現(xiàn)的故障部位逐層進(jìn)行推理的[11],因此,在進(jìn)行故障推理之前,首先確定故障的層次結(jié)構(gòu),然后設(shè)定每層父節(jié)點(diǎn)對(duì)應(yīng)的熱區(qū)個(gè)數(shù),最后根據(jù)每層熱區(qū)個(gè)數(shù)確定每個(gè)熱區(qū)的屏幕位置坐標(biāo)。
熱區(qū)確定后,按1.1所述方法進(jìn)行索引編碼,形成索引編碼表,如表1所示。從編碼長(zhǎng)度為1的可能部件進(jìn)行推理,然后根據(jù)故障現(xiàn)象“是”與“否”邏輯關(guān)系,確定下一層可能的故障部件。具體推理規(guī)則如下:
1)編碼長(zhǎng)度表示結(jié)點(diǎn)所在層,記為n,如故障部位為第n層,用* *…*n個(gè)字母表示編碼串,由最小長(zhǎng)度編碼串開(kāi)始推理;
2)如果父節(jié)點(diǎn)不是故障診斷結(jié)果,則上一層推理結(jié)束后,編碼串長(zhǎng)度自動(dòng)加1,尋找下一層子編碼串;
3)去掉編碼串末位字母,剩余編碼串與父節(jié)點(diǎn)編碼進(jìn)行匹配,匹配成功則為該父節(jié)點(diǎn)所對(duì)應(yīng)的可能的子節(jié)點(diǎn)故障部位;
4)取匹配成功的子節(jié)點(diǎn)編碼串末位字母,按照“A”,“B”,“C”…字母順序進(jìn)行先后次序選擇熱區(qū);
5)如果診斷結(jié)果為“否”,則按照為字母順序繼續(xù)選擇新的熱區(qū),如果診斷結(jié)果為“是”,表示本層推理結(jié)束,進(jìn)入步驟2),以此類(lèi)推,直到推理結(jié)束。
2 自動(dòng)推理技術(shù)
故障樹(shù)是故障推理的基本依據(jù)[12],對(duì)故障樹(shù)進(jìn)行編碼,可以形成自動(dòng)推理機(jī)[13]。可視化交互式故障診斷是在故障樹(shù)的基礎(chǔ)上,將故障樹(shù)自動(dòng)推理編碼與熱區(qū)索引編碼及推理規(guī)則一一對(duì)應(yīng)起來(lái),可以實(shí)現(xiàn)故障的自動(dòng)推理與實(shí)際裝備部件圖相互結(jié)合,并且能夠按照推理步驟逐層對(duì)裝備進(jìn)行LRU級(jí)分解展開(kāi),以實(shí)際部件嵌套式結(jié)構(gòu)形式顯示出來(lái),使用戶(hù)在推理過(guò)程中,直觀掌握故障所在部位。
2.1 故障樹(shù)編碼
故障樹(shù)自動(dòng)編碼的關(guān)鍵技術(shù)是用“0”、“1”表示的字符串,字符串長(zhǎng)度代表故障樹(shù)對(duì)應(yīng)的層數(shù),首位表示下一層為“推理過(guò)程”或“診斷結(jié)果”,如果下一層為“推理過(guò)程”,則首位記為“1”,如果下一層為“診斷結(jié)果”,則首位記為“0”;末尾編碼則表示推理過(guò)程“是”或“否”的判斷,如果回答為“是”則末尾編碼為“1”,否則記為“0”;中間字符串,為上一層字符串去掉首位之后的剩余編碼。以此類(lèi)推,由首層總故障現(xiàn)象“1”進(jìn)行推理。故障樹(shù)及故障樹(shù)對(duì)應(yīng)編碼如圖1及圖2所示。
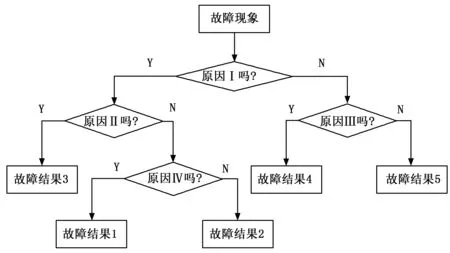
圖1 典型故障樹(shù)
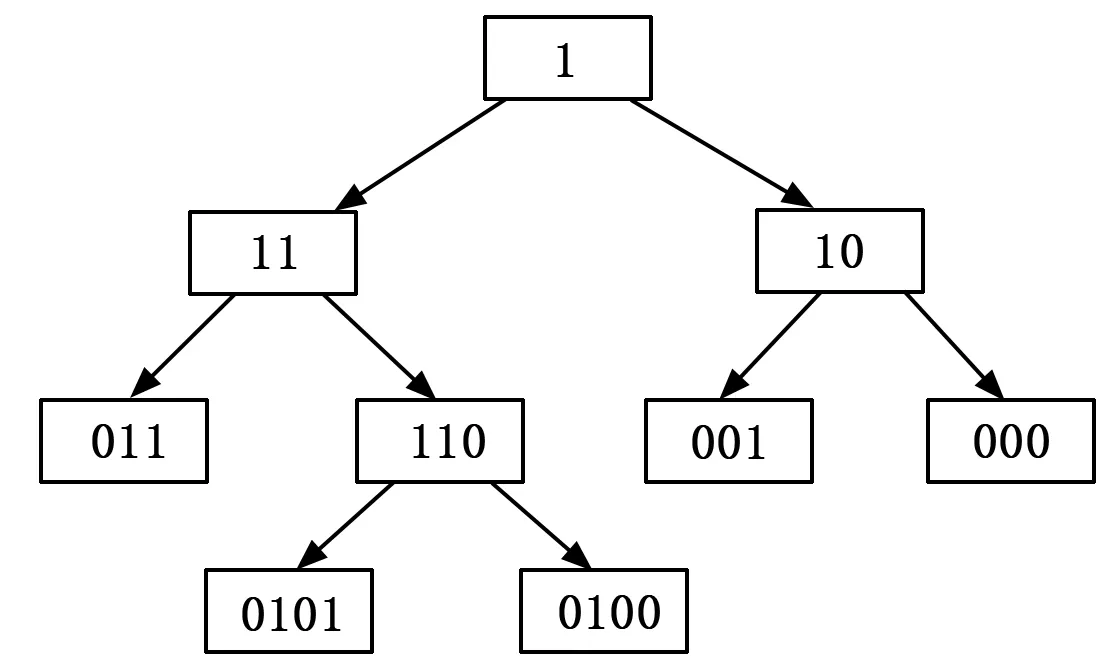
圖2 故障樹(shù)編碼
2.2 可視化交互式故障自動(dòng)推理
對(duì)故障樹(shù)進(jìn)行編碼后,即可以實(shí)現(xiàn)故障自動(dòng)推理。故障推理從頂層故障現(xiàn)象開(kāi)始,故障編碼為“1”,選擇此故障現(xiàn)象對(duì)應(yīng)的故障熱區(qū),為第一層故障分解設(shè)備,之后的推理在此基礎(chǔ)上自動(dòng)展開(kāi)。
推理過(guò)程中,如果選擇“是”,則選擇第二層末尾為“1”的字符串繼續(xù)推理,否則選擇第二層末尾為“0”的字符串繼續(xù)推理。推理過(guò)程可以一直延續(xù)到最底層故障結(jié)果,也可以按照編碼規(guī)則,返回到上一層。在推理過(guò)程中,伴隨著熱區(qū)提示,既可以通過(guò)文字也可以通過(guò)熱區(qū)進(jìn)行推理,并逐層顯示故障部件嵌套關(guān)系。
在如圖1所示的故障推理過(guò)程中,如果圖2中的編碼串“1”對(duì)應(yīng)熱區(qū)A,則開(kāi)始推理時(shí),“A”區(qū)矩形框閃亮,提示該部位出現(xiàn)故障。如果推理選擇“原因Ⅰ”為“是”,則其編碼為“11”,對(duì)應(yīng)故障熱區(qū)將在“AA”、“AB”、“AC”中選擇,三個(gè)熱區(qū)均被激活。如果用戶(hù)選擇“AB”,則繼續(xù)按“ABA”、“ABB”、“ABC”進(jìn)行下一層的選擇和推理。故障推理主要按照故障樹(shù)編碼進(jìn)行,通過(guò)“是”與“否”的判斷直接牽引著推理自動(dòng)進(jìn)行,因?yàn)楣收蠘?shù)中有些部分是邏輯判斷,需要在同一層次不同熱區(qū)內(nèi)進(jìn)行選擇,所以熱區(qū)編碼除了輔助推理相對(duì)應(yīng)的裝備圖形以外,還要在“是”與“否”的判斷撤銷(xiāo)執(zhí)行時(shí),尋找到上一次嵌套關(guān)系。
3 實(shí)例分析
3.1 故障描述
表2為廠家提供的某電子裝備測(cè)頻系統(tǒng)故障的故障現(xiàn)象、可能原因及故障檢測(cè)工作流程。從表中可以看出,故障原因、維修方法看似寫(xiě)的比較清楚,但實(shí)際維修時(shí)面對(duì)具體的故障,維修人員卻無(wú)從下手,因?yàn)檫@些故障現(xiàn)象和故障原因之間有著比較復(fù)雜的邏輯關(guān)系。

表2 某電子裝備測(cè)頻系統(tǒng)故障現(xiàn)象及診斷結(jié)果
經(jīng)咨詢(xún)廠家,將表2轉(zhuǎn)換成如圖3所示以二叉樹(shù)形式表示成的故障樹(shù),便于推理機(jī)進(jìn)行邏輯推理。從圖3可以看出,經(jīng)轉(zhuǎn)換后的故障樹(shù)分為6層,包含7類(lèi)可能的故障現(xiàn)象,9個(gè)故障診斷結(jié)果,邏輯關(guān)系復(fù)雜。采集裝備各個(gè)部位的實(shí)際照片,并按2.1節(jié)所示方法對(duì)故障樹(shù)進(jìn)行編碼,以1.1節(jié)所示方法進(jìn)行熱區(qū)的標(biāo)識(shí)和索引編碼,形成圖4所示的該故障樹(shù)對(duì)應(yīng)的故障編碼和熱區(qū)編碼,并通過(guò)軟件編程研制故障診斷系統(tǒng),即可對(duì)該型裝備的故障進(jìn)行診斷與快速定位。

圖3 故障樹(shù)自動(dòng)編碼

圖4 故障樹(shù)編碼
3.2 故障推理及實(shí)現(xiàn)
故障推理由編碼“1”開(kāi)始,選擇對(duì)應(yīng)的熱區(qū),假設(shè)此故障的熱區(qū)對(duì)應(yīng)為“A”,A下包含AA,AB,AC,AD共4個(gè)可能的部件故障,首先判斷“測(cè)頻部分是否有取數(shù)脈沖”,選擇故障熱區(qū) “AA”下的“AAA”部件,對(duì)“AAAA”位置進(jìn)行測(cè)試,如果選擇“是”,故障編碼為“11”,繼續(xù)選擇熱區(qū)“AAAB”進(jìn)行測(cè)試,判斷是否為“測(cè)向頻段故障”,故障樹(shù)編碼為“111”,以此類(lèi)推,按照2.1所述方式進(jìn)行編碼,結(jié)合熱區(qū)編碼逐層展開(kāi);如果選擇“否”,故障編碼為“10”,故障熱區(qū)選擇“AD”,判斷“Z-X3是否有信號(hào)”。以此類(lèi)推,直到最后一層判斷結(jié)束。
4 結(jié)束語(yǔ)
利用故障樹(shù)編碼技術(shù)及熱區(qū)技術(shù)進(jìn)行裝備可視化故障診斷,可以將故障樹(shù)直接轉(zhuǎn)換成自動(dòng)推理機(jī),結(jié)合裝備故障位置按照故障現(xiàn)象進(jìn)行診斷。故障樹(shù)編碼代表故障推理的邏輯關(guān)系,與熱區(qū)編碼有機(jī)結(jié)合起來(lái),即可以實(shí)現(xiàn)自上而下的推理過(guò)程,當(dāng)出現(xiàn)誤判時(shí),也可以實(shí)現(xiàn)自下而上的返回。該方法簡(jiǎn)潔有效,便于快速定位故障原因,可廣泛推廣應(yīng)用到各類(lèi)裝備故障診斷、維修保障訓(xùn)練中。
[1] 吳今培,肖健華.智能故障診斷與專(zhuān)家系統(tǒng)[M].北京:科學(xué)出版社,1997.
[2] Zhang Y, Wang Z, Zhang J, et al. Fault detection based on discriminant analysis theory in power systems[J]. ICIC Express Letters, 2010,4(3):809-814.
[3] 王子玲,許愛(ài)強(qiáng),楊智勇.裝備故障診斷和預(yù)測(cè)技術(shù)綜述[J].火力與指揮控制,2008,33(S2):8-10.
[4] Wu L, Su X, Shi P. Mixed H2/H∞approach to fault detection of discrete linear repetitive processes[J]. Journal of Franklin Institute, 2011,348(2):393-414.
[5] 紀(jì)伯公,石海濱,張 博,等.復(fù)雜武器電氣系統(tǒng)故障診斷技術(shù)綜述[J].火炮發(fā)射與控制學(xué)報(bào),2006, (增1):33-36.
[6] 倪紹徐,張?jiān)7?易 宏,等.基于故障樹(shù)的智能故障診斷方法[J].上海交通大學(xué)學(xué)報(bào),2008,42(8):1372-1375.
[7] Bokor J, Zabo S. Fault detection and isolation in nonlinear systems[J]. Annual Reviews in Control, 2009, 33(2):113-123.
[8] Vojtech V, Danica R. Sequential design of robust output model predictive control[J]. International Journal of Innovative Computing, Information and Control, 2010, 6(10):4743-4754.
[9] 郭興吉.不規(guī)則圖形熱區(qū)技術(shù)研究[J].計(jì)算機(jī)應(yīng)用與軟件,2013,30(5):295-297.
[10] Zhai Y, Liu B. Extracting Web Data Using Instance Based Learning[A]. Proc. of the 6th Intl. Conf. on Web Information Systems Engineering(WISE 05)[C].2005:318-331.
[11] 胡良明,徐 誠(chéng),李萬(wàn)平.基于案例推理的自行火炮故障診斷專(zhuān)家系統(tǒng)[J].火炮發(fā)射與控制學(xué)報(bào),2006(2):53-57.
[12] Zhang X, Jiang Y, Chen A, et al. A gradual approach for model-based diagnosis[J]. Journal of Software,2008, 19(3):584-593.
[13] 孫慶生,楊飛飛,王克峰.電氣設(shè)備紅外熱像圖譜分類(lèi)編碼與故障樹(shù)研究[J].水電能源科學(xué),2012,30(5):161-163.
Study of Visual Fault Reasoning and Diagnosis Based on Equipment Structure Decomposition
Dai Yao, Ma Ye, Wang Zhen
(Dept.of Information Warfare, Dalian Naval Academy, Dalian 116018, China)
Aiming at complex equipment fault diagnosis and equipment structure cannot directly corresponding to the cause of the problem of automatic reasoning and rapid positioning problem, studies a visual fault reasoning and diagnosis technology based on equipment structure decomposition. By defining the hot zone and hot zone index, corresponds the fault reasoning and diagnosis to equipment structure decomposition, constructs the fault automatic reasoning coding rules in the process of diagnosis, which can convert the fault tree to a series of operational and certain logical code, and through software programming code appears in the form of fault phenomenon for troubleshooting, which realizes automatic fault reasoning chart combined with the actual equipment parts. This method can according to the reasoning step by step to LRU level decomposition equipment, and to realize visual automatic reasoning and diagnosis. An example for the electronic equipment fault reasoning is presented to illustrate the feasibility and effectiveness of the proposed approach, can achieve equipments’ visual LRU hierarchical fault diagnosis and rapidly position the faults.
fault diagnosis; visualization; LRU decomposition; automatic inference engine; fault coding
2016-09-07;
2016-09-30。
海軍大連艦艇學(xué)院2110工程三期資助學(xué)術(shù)預(yù)研課題。
戴 耀(1978-),男,浙江湖州人,博士研究生,副教授,主要從事電子對(duì)抗裝備作戰(zhàn)使用及維修保障方向的研究。
馬 野(1966-),女,吉林德惠人,博士研究生,教授,主要從事兵器科學(xué)與技術(shù)、自動(dòng)化技術(shù)方向的研究。
1671-4598(2017)02-0012-03
10.16526/j.cnki.11-4762/tp.2017.02.003
TP182
A
猜你喜歡
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
傳媒評(píng)論(2019年4期)2019-07-13 05:49:14
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21

- 計(jì)算機(jī)測(cè)量與控制的其它文章
- 電動(dòng)汽車(chē)充電設(shè)施現(xiàn)場(chǎng)電磁兼容特性及防護(hù)技術(shù)研究
- 動(dòng)力系統(tǒng)試驗(yàn)自動(dòng)緊急關(guān)機(jī)系統(tǒng)設(shè)計(jì)與建立
- 社交網(wǎng)絡(luò)中熱點(diǎn)話(huà)題深度挖掘方法及實(shí)驗(yàn)測(cè)試
- 一種提高國(guó)產(chǎn)ADC模塊采樣精度的方法
- 石油化工儀表防雷接地系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
- 基于QoS和分簇機(jī)制的WMSNs路由算法研究