基于UG偏曲軸少齒差行星減速器內(nèi)齒輪副參數(shù)化建模的研究
2017-03-25 05:28:03李東輝徐強(qiáng)陳超超
裝備制造技術(shù) 2017年1期
李東輝,徐強(qiáng),陳超超
(合肥學(xué)院機(jī)械工程系,安徽合肥230601)
基于UG偏曲軸少齒差行星減速器內(nèi)齒輪副參數(shù)化建模的研究
李東輝,徐強(qiáng),陳超超
(合肥學(xué)院機(jī)械工程系,安徽合肥230601)
為了創(chuàng)建偏曲軸少齒差行星減速器內(nèi)齒輪副的變參裝配模型,分析了內(nèi)齒輪副漸開線任一點(diǎn)的包角與壓力角及展角的關(guān)系。引進(jìn)UG的內(nèi)部參數(shù)t,建立了齒頂圓與齒根圓之間的漸開線直角坐標(biāo)方程,并分別建立了外齒輪與內(nèi)齒輪漸開線基本表達(dá)式。以此為契機(jī),分別進(jìn)行了內(nèi)外齒輪及齒輪副裝配的參數(shù)建模。結(jié)果表明,該裝配模型在滿足一定條件下,隨著齒輪的參數(shù)變化而變化,為今后對該機(jī)構(gòu)優(yōu)化設(shè)計(jì)、運(yùn)動仿真打下堅(jiān)實(shí)的基礎(chǔ)。
行星減速器;漸開線;壓力角;參數(shù)
偏曲軸少齒差行星減速器具有結(jié)構(gòu)緊湊、降速比大、體積小、傳動精度高等特點(diǎn)[1]。為了便于對該減速器優(yōu)化設(shè)計(jì),需要對該減速器進(jìn)行三維參數(shù)化建模。目前,很多文獻(xiàn)對直齒或斜齒輪進(jìn)行了參數(shù)化建模,但對變位的內(nèi)齒輪副參數(shù)化建模研究較少[2-3]。本文通過UG6.0這個(gè)軟件工具,對偏曲軸少齒差內(nèi)齒輪副進(jìn)行參數(shù)化建模,為進(jìn)一步深入研究該減速器,打下堅(jiān)實(shí)的基礎(chǔ)。
1 偏曲軸少齒差行星減速器內(nèi)齒輪副限制條件
偏曲軸少齒差行星減速器核心部件是少齒差內(nèi)齒輪副,外齒行星齒輪做平動,內(nèi)齒輪做大傳動比減速轉(zhuǎn)動。
對于少齒差內(nèi)嚙合齒輪副,為了保證內(nèi)齒輪副連續(xù)傳動,必須保證傳動重合度ε大于重合度最小許用值[ε];為了保證少齒差不產(chǎn)生重疊干涉,必須Gs>0;為保證內(nèi)齒輪齒廓為漸開線齒廓,內(nèi)齒輪的齒頂圓必須大于基圓;同時(shí),內(nèi)外齒輪的齒頂具有足夠的厚度,內(nèi)外齒輪的齒根不發(fā)生根切,插齒加工的內(nèi)齒輪不發(fā)生頂切等。具體參數(shù)計(jì)算值通過查文獻(xiàn)[4]得到。
2 漸開線少齒差內(nèi)齒輪副參數(shù)化建模
2.1 參數(shù)化建模原理
三維軟件參數(shù)化設(shè)計(jì)實(shí)質(zhì)通過改變設(shè)計(jì)參數(shù),從而改變零件的尺寸及形狀。對于偏曲軸少齒差行星減速器內(nèi)齒輪副的齒輪參數(shù)為:模數(shù)m、齒數(shù)Z、變位系數(shù)X、齒頂高系數(shù)則內(nèi)、外齒輪齒根圓及齒頂圓直徑公式可參考文獻(xiàn)[5]。
在UG中,漸開線齒廓由“規(guī)律曲線”來實(shí)現(xiàn)。使用規(guī)律曲線有兩點(diǎn)要求:(1)建立漸開線齒廓直角坐標(biāo)方程式;(2)這些方程式所使用的變量t必須是位于[0,1]之間的變量[6]。
設(shè)基圓半徑rb,漸開線直角坐標(biāo)方程式為[7]

式中βk為漸開線上點(diǎn)K的滾角。
為了實(shí)現(xiàn)變參控制的齒廓曲線,必須得到齒頂圓與齒根圓之間的漸開線,即必須求出齒根圓上的滾角βf,齒頂圓上的滾角βa.
設(shè)漸開線與任一半徑rk的圓的交點(diǎn)為K,如圖1所示,該交點(diǎn)K的漸開線展角θk,壓力角為αk,則該點(diǎn)的滾角為:

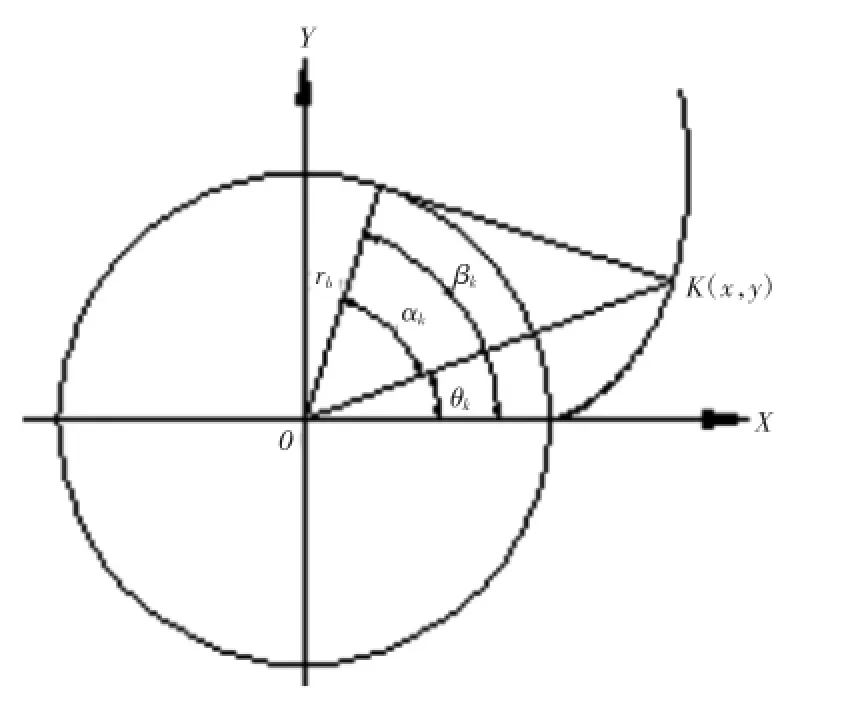
圖1 漸開線展角、壓力角與滾角的關(guān)系
設(shè)t為UG的內(nèi)部變量,其變化范圍為[0,1]之間,齒頂圓與齒根圓之間漸開線的滾角為:

則齒頂圓與齒根圓之間的漸開線直角坐標(biāo)方程為:

2.2 齒廓的參數(shù)建模
(1)創(chuàng)建外齒輪漸開線表達(dá)式由內(nèi)齒輪副基本參數(shù)計(jì)算出外齒輪的基圓直徑db1,齒頂圓直徑da1,齒根圓直徑df1,其漸開線表達(dá)式如下:
alpha1=arccos(db1/da1)//alpha1為齒輪1漸開線與齒頂圓交點(diǎn)a1壓力角,單位為角度
alphra1=Radians(alpha1)//alphra1為alpha1弧度值
ceta1=tan(alpha1)-alphra1//ceta1為基圓與齒頂圓之間漸開線段對應(yīng)的展角,單位應(yīng)填恒定
cetda1=deg(ceta1)//cetda1為ceta1角度值
Ba1=cetda1+alpha1//Ba1為輪1齒頂圓上漸開線點(diǎn)a對應(yīng)滾角的角度值
齒根圓的滾角Bf1與齒頂圓的滾角計(jì)算類似,這里不再詳述。
t=1//t為UG內(nèi)部系統(tǒng)變量,t=0-1
Bt1=Bf1+(Ba1-Bf1)*t//Bt1為齒頂圓與齒根圓之間的漸開線滾角的角度值
Btr1=Radians(Bt1)Btr1為Bt1弧度值,單位為恒定
xt1=rb1*cos(Bt1)+rb1*Btr1*sin(Bt1)
yt1=rb1*cos(Bt1)-rb1*Btr1*cos(Bt1)
(2)選擇“草圖>任務(wù)環(huán)境中的草圖”在XOY平面分別創(chuàng)建分度圓、齒根圓、齒頂圓。
(3)創(chuàng)建第一條漸開線。由于之前已經(jīng)建立完成漸開線表達(dá)式,因此,便可以直接選擇“插入>曲線>規(guī)律曲線”,在XC-YC坐標(biāo)平面內(nèi)生成第一條漸開線線段S1.
(4)創(chuàng)建外齒廓對稱基準(zhǔn)平面。任意畫一條線段l1,選擇“約束”命令使其一個(gè)端點(diǎn)與原點(diǎn)重合,使另一個(gè)端點(diǎn)既在分度圓上又在漸開線上,創(chuàng)建一條與l1的夾角為90/Z1的線段l2,退出草圖環(huán)境,創(chuàng)建一條與ZC軸重合長度任意的線段l3.通過“基準(zhǔn)平面”在“類型”中選擇“兩條直線”創(chuàng)建對稱基準(zhǔn)平面。
(5)創(chuàng)建對稱漸開線。通過“插入>關(guān)聯(lián)復(fù)制>鏡像特征”便可得到所需的第二條漸開線。
(6)完成輪齒繪制。選擇“拉伸”在命令欄選擇“單條曲線”、“在相交處停止”,選中所需要的線段,拉伸長度為齒厚B.利用“對特征形成圖樣”命令,其中“數(shù)量”為齒數(shù)Z1,“節(jié)距角”為360°/Z1,便可得到齒數(shù)為Z1的齒輪齒形,然后將齒根圓拉伸長度為齒厚B,生成的齒輪如圖2所示。
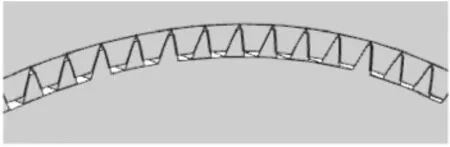
圖2 內(nèi)齒輪副裝配參數(shù)化裝配模型
內(nèi)齒廓的齒槽相當(dāng)于外齒輪的齒廓,內(nèi)齒輪齒廓相當(dāng)于外齒輪的齒槽,因而內(nèi)齒廓參數(shù)建模基本思路是相似的,這里不再詳述。
2.3 內(nèi)齒輪副裝配模型
新建一個(gè)空的裝配文件,導(dǎo)入內(nèi)齒輪建模時(shí)的表達(dá)式即所有表達(dá)式,這樣才能實(shí)現(xiàn)變參。
(1)進(jìn)入草圖環(huán)境,創(chuàng)建兩條平行線且距離為實(shí)際中心距a’.
(2)“添加組件”先添加內(nèi)齒輪,通過“裝配約束>接觸對其>自動判斷軸中心”使內(nèi)齒輪中心與一條線段重合,然后添加外齒輪使其中心與另一條線段重合,選擇“接觸”使內(nèi)齒輪齒廓與外齒輪齒廓接觸,選擇“對齊”使兩齒輪的一個(gè)端面在同一平面上,如圖2所示。
圖2的外齒輪的參數(shù)為:m=2,Z1=126,X1=0.6;內(nèi)齒輪的參數(shù)為:m=2,Z2=128,X2=0.823.圖3的內(nèi)、外齒輪參數(shù)為:m=1.5,Z1=110,X1=0.085,Z2=112,X2=0.398 8.從圖3可看出,在滿足一定條件下,若改變齒輪的齒數(shù)、模數(shù)、變位系數(shù)等參數(shù),整個(gè)內(nèi)齒輪的裝配模型尺寸也隨之改變。
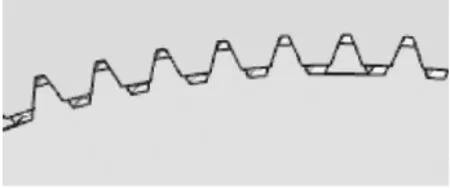
圖3 參數(shù)變化后的內(nèi)齒輪副裝配模型
3 結(jié)論
通過上述內(nèi)齒輪副參數(shù)化建模研究,得到如下結(jié)論:
(1)分析漸開線任一點(diǎn)K,其滾角與壓力角以及漸開線展角之間關(guān)系,引進(jìn)UG的內(nèi)部參數(shù)t,建立了齒頂圓與齒根圓之間漸開線滾角公式,并創(chuàng)建漸開線直角坐標(biāo)方程。
(2)分別建立內(nèi)外齒輪漸開線基本表達(dá)式,并分別進(jìn)行了內(nèi)外齒輪的參數(shù)建模,且建立了內(nèi)齒輪副的裝配模型。結(jié)果表明,該裝配模型,在滿足一定條件下,隨著齒輪參數(shù)變化而變化。
[1]徐強(qiáng),許澤銀,許道益.基于Matlab偏曲軸少齒差行星減速器最大承載能力的研究[J].機(jī)械強(qiáng)度,2014,36(2):222-227.
[2]王書賢,汪云,鄧?yán)姡?基于UG的漸開線斜齒圓柱齒輪參數(shù)化設(shè)計(jì)[J].機(jī)械傳動,2011,35(5):36-38.
[3]李玉龍.泵用斜齒輪副精確模型UG下的快速實(shí)現(xiàn)[J].中國農(nóng)機(jī)化學(xué)報(bào),2013,34(5):171-174.
[4]XU Qiang,XU QiSheng,XU DaoYi.Study on calculations of geometric dimensions and modification coefficients of plane tary gear reducer of less tooth difference with biasing crankshaft based on MATLAB[J].Advanced Materrial Research,2012,644(11):298-303.
[5]張黎驊,鄭平.新編機(jī)械設(shè)計(jì)手冊[M].北京:人民郵電出版社,2008:376-380.
[6]李玉龍,劉焜,鮑仲輔.基于漸開線齒輪展成法的參數(shù)化精確建模[J].現(xiàn)代制造工程,2006(9):70-72.
[7]白劍峰,賀靠團(tuán).基于UG的漸開線圓柱齒輪參數(shù)化設(shè)計(jì)[J].現(xiàn)代制造工程,2006(2):118-121.
Study on UG Axis Deviation of Planetary Reducer in Parametric Gear Modeling Based on Small Tooth Difference
LI Dong-hui,XU Qiang,CHENG Chao-chao
(Department of Mechanical Engineering,Hefei University,Hefei Anhui 230601,China)
In order to create the assembly modeling of internal gear pairs of planetary gear reducer of less tooth difference with biasing crankshaft on variable parameters,the relationships were analyzed among the wrap angle,the pressure angle and the turning angle at any point on the involute curve of the internal gear pairs,the inside parameter t in UG was introduced,the equations of rectangular coordinates of the involute curve between the addendum circle and the dedendum circle were built,the parametric models of the external and internal gears were built,at the same time,the assembly modeling of the internal gear pairs was created.The result shows that the assembly modeling changes with the parameters of internal gear pairs under some conditions,and builds a steady basis for the optimizing design and motion simulation of the mechanism in the future.
planetary gear reducer;Involute curve;pressure angle;parameters
TH132.413
:A
:1672-545X(2017)01-0026-03
2016-10-18
1.安徽省教育廳自然科學(xué)重點(diǎn)項(xiàng)目(kJ2012A247)新型工業(yè)機(jī)器人減速器的研制;2.合肥學(xué)院人才科研基金項(xiàng)目(15RC10)新型變齒厚RV減速器最大承載能力及機(jī)械效率的優(yōu)化研究
李東輝(1994-),男,安徽宿州人,本科,研究方向:機(jī)械設(shè)計(jì)制造;徐強(qiáng)(1962-),男,安徽合肥人,碩士,教授,研究方向:研究方向:機(jī)械設(shè)計(jì)制造。
