基于“香蕉派”的語音交互式機器人
2017-03-27 22:07:47劉潤暄
電子技術與軟件工程 2017年4期


摘 要 本文介紹了一款基于“香蕉派”全語音交互式的智能機器人,它能根據人的語言自動識別“行走”命令或“聊天”內容,并自主行走或與人智能交流。它以Banana PI開源硬件平臺作為控制服務器,通過訊飛平臺的語音識別和GPIO接口控制外置驅動器,實現語音交互式行走等基本功能。實驗證明該機器人能夠準確接收指令并做出反應,可靠性較高。并且無任何外設,使用方便。
【關鍵詞】香蕉派 行走機器人 語音交互 Banana Pi
“香蕉派”(Banana Pi,簡寫為BPI),與“樹莓派”類似,但是硬件配置更高、性能更強,對安卓(Android)系統的支持更好。其中,“樹莓派”(Raspberry Pi,簡寫為RPi/RasPi/RPI)是一款基于ARM的微型電腦主板,只有信用卡大小,其系統基于Linux。它以SD/MicroSD卡為內存硬盤,卡片主板周圍有多個USB接口和以太網接口,可連接鍵盤、鼠標和網線,同時擁有視頻模擬信號的電視輸出接口和HDMI高清視頻輸出接口,具備所有PC的基本功能。
1 機器人系統簡介
本款機器人的特點:
(1)零設置、零輔助,不需要遙控器、手機等任何輔助設備,完全根據語音命令智能響應;
(2)智能化的人機聊天,隨著技術的發展即時提升智能化水平。
硬件可基于“樹莓派”微型電腦主板,采用3代B型,安裝Linux系統,使用C語言進行相應軟件開發。也可以基于“香蕉派”微型電腦主板,采用BPI-M3型號,安裝Android系統,相應軟件開發使用與Java相似度很高的Android開發集成環境。以“香蕉派”為例,描述本機器人的設計開發過程。
2 硬件實現
整個系統分兩步進行開發調試環境的搭建,首先是搭建“香蕉派”核心處理系統。其是一個袖珍的主板卡,但是“麻雀雖小,五臟俱全”,除去“香蕉派”主板外,還需準備一套標準通用的USB鍵盤和鼠標,一個顯示器用于開發調試(開發完成后可以拆除)。兩塊電池用于整個系統供電,最后還需要準備預裝了安卓系統的SD卡(對于SD卡要求讀寫最好在4MB/S以上、容量大于2GB)。
在完成核心處理系統的搭建后,再進行機器人外圍系統的搭建,首先利用訊飛平臺完成對機器人的“行走控制”或“聊天命令”的語音識別,然后利用“香蕉派”的GPIO接口,控制外置驅動器實現電機的使能、正反轉控制。整個系統的硬件框圖如圖1所示。
2.1 “香蕉派”系統板
“香蕉派”BPI-M3是一款8核高性能單板計算機,兼容“樹莓派”,還可以運行Android5.1、Debian linux、Ubuntu linux、Raspberry Pi系統。硬件配置為:1GHz ARM7 8核處理器,2GB LP DDR3內存,千兆以太網口,2個USB接口,支持2K高清視頻輸出。GPIO兼容Raspberry Pi B+,并能運行其ROM Image。開發板的正反面如圖2所示。
2.2 電機驅動板
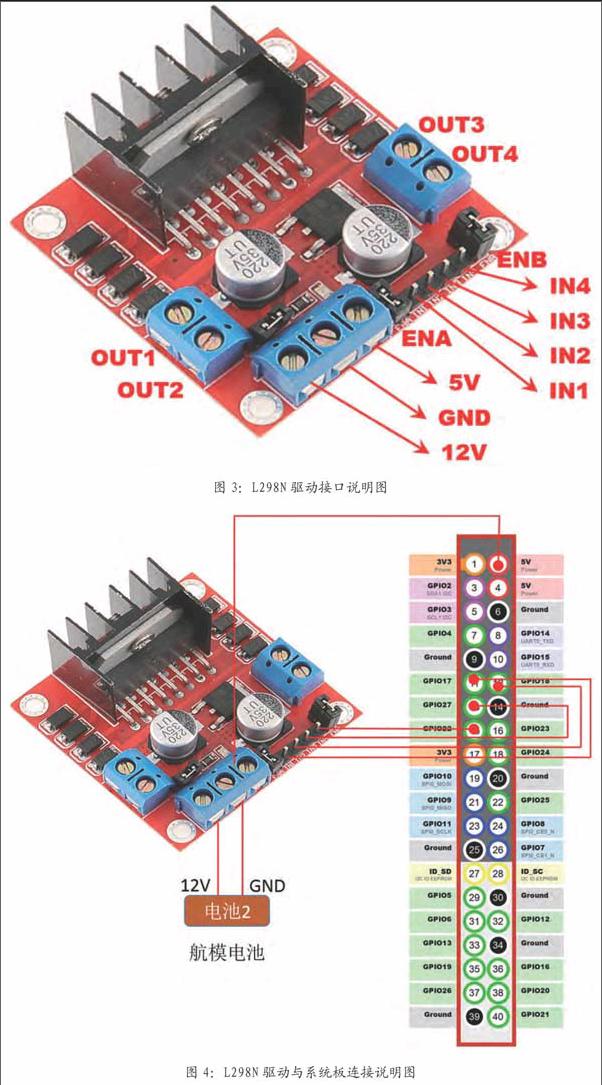
本模塊使用L298N作為主驅動芯片,具有驅動能力強,發熱量低,抗干擾能力強的特點。其實物如圖3所示,其中:
2.2.1 +12V接入口
電壓范圍:+5V~+35V,使用航模電池供電。
2.2.2 電機接口
OUT1、OUT2為電機A輸出;OUT3、OUT4為電機B輸出。
2.2.3 IO接口
ENA和ENB分別為A、B電機的使能端,一開始ENA和ENB各自的上下兩個針腳是用跳線帽連接起來的,拔掉就可以接線了。IN1~IN4為IO控制輸入,與樹莓派的GPIO接口相連接。
2.3 系統板與電機驅動板連接
通過“香蕉派”的GPIO接口,控制電機驅動方向及速度,實現小車的前進、后退、變向。把電機接到L298N驅動板上面,然后把電池的正極接到12v接口,負極接到接地接口,5V輸入從香蕉派的GPIO2接入。IN1、IN2、IN3、IN4分別接“香蕉派”GPIO的11、12、13、15號接口。如圖4所示。
2.4 移動平臺
本機器人使用奧松AS-2WD鋁合金移動平臺,它是2輪驅動,可安裝多款直流電機與伺服舵機,并且可以搭載多款控制器、驅動器、傳感器和無線射頻模塊等。其外形如圖5所示。
2.5 電池與其它附件
電池供電使用兩種:一是10000mAH的充電寶,為“香蕉派”核心處理板供電;二是“格氏ACE 3S 11.1V 2200mAh 30C”無人機航模電池,為電機驅動板供電。“香蕉派”內置麥克,不需要外接,但是無內置喇叭,所以,通過音頻輸出口外接一個綠色球形音箱。
3 軟件實現
本機器人系統的軟件設計主要分為兩類,分別為實現流程框圖如圖6所示。
3.1 語音聽寫
3.2 語音識別
語音識別即語法識別,主要指基于命令詞的識別,識別指定關鍵詞組合的詞匯,或者固定說法的短句。語法識別分云端識別和本地識別,云端和本地分別采用ABNF和BNF語法格式。本機器人使用了云端識別,實現方法如下。
4 總結
經過各硬件模塊組裝及調試,本款機器人完成后的外觀如圖7所示。
經實際使用后,得出本款機器人的智能化程度較高,基礎功能已經比較完善。但依然存在諸多問題,系統多方面有待優化升級。
其中,由于香蕉派內置麥克拾音效果較差,影響了語音識別的質量,可選擇外帶設備提升性能;另外,限于時間原因,后續還需增加紅外避障和自動跟隨功能,紅外避障,就是能夠根據語音指令,自主完成避障行走。自動跟隨,就是在語音設定好跟隨模式后,可智能跟隨在人身邊,亦步亦趨。基于硬件電路圖像處理的視覺導航技術,高智能情感移動機器人等技術是移動機器人發展趨勢。
參考文獻
[1]王江偉.玩轉樹莓派Raspberry Pi[M].北京:北京航空航天大學出版社,2013.
[2]丁偉雄,楊定安,宋曉光.步進電機的控制原理及其單片機控制實現[J].煤礦機械,2005(06).
[3]左國玉,劉文舉,阮曉鋼.聲音轉換技術的研究與進展[J].電子學報,2004(07).
[4]徐國保,尹怡欣,周美娟.智能移動機器人技術現狀及展望[J].機器人技術與應用,2007(02).
作者簡介
劉潤暄(2001-),男,山東省濟南市槐蔭區人。山東省實驗中學2016級。
作者單位
山東省實驗中學 山東省濟南市 250001