修井機(jī)臺(tái)面扶管機(jī)械手虛擬樣機(jī)設(shè)計(jì)
2017-03-27 08:05:07焦偉剛祝克強(qiáng)胡送橋
石油礦場機(jī)械 2017年2期
焦偉剛,祝克強(qiáng),胡 穎,胡送橋
(三一集團(tuán)有限公司 湖南分公司,長沙 410100)①
修井機(jī)臺(tái)面扶管機(jī)械手虛擬樣機(jī)設(shè)計(jì)
焦偉剛,祝克強(qiáng),胡 穎,胡送橋
(三一集團(tuán)有限公司 湖南分公司,長沙 410100)①
為減少修井機(jī)臺(tái)面作業(yè)工人的工作強(qiáng)度,設(shè)計(jì)了一套臺(tái)面扶管機(jī)械手,可替代人工完成危險(xiǎn)的扶管起下油管作業(yè)。借助仿真分析軟件ADAMS和ANSYS聯(lián)合仿真,分析了機(jī)械手從貓道接送管柱至井口的各項(xiàng)運(yùn)動(dòng)參數(shù),為動(dòng)力設(shè)計(jì)選型提供了理論依據(jù);借助剛?cè)狁詈戏椒ǎ治隽朔龉軝C(jī)械手在不同油缸移動(dòng)加速度下的末端抓手抖動(dòng)問題。為扶管機(jī)械手動(dòng)力選型、設(shè)計(jì)改進(jìn)提供了數(shù)據(jù)支撐,縮短了產(chǎn)品設(shè)計(jì)周期。
修井機(jī);扶管機(jī)械手;ADAMS;ANSYS;剛?cè)狁詈希惶摂M樣機(jī)
為了節(jié)約人工成本,降低工人工作危險(xiǎn)性,油田及鉆井承包商要求能夠?qū)崿F(xiàn)自動(dòng)化鉆修井作業(yè)。目前,鉆井自動(dòng)化管柱處理設(shè)備的研發(fā)較多,國內(nèi)外主要鉆機(jī)制造商大多推出了自動(dòng)化管柱處理系統(tǒng)的產(chǎn)品[1-3]。修井作業(yè)相比鉆井作業(yè)工期較短,修井設(shè)備大多采用車載形式[4-6]。
我國大多數(shù)的修井作業(yè)中,除了使用液壓大鉗對(duì)管柱進(jìn)行上卸扣,實(shí)現(xiàn)了半自動(dòng)化之外,其他的井口操作均是人工操作。井口操作主要包括人工對(duì)中油管或抽油桿等管柱,推拉扶液壓大鉗對(duì)管柱進(jìn)行上卸扣;吊環(huán)和吊卡的摘、搬、掛,吊卡銷子的拔和插;油管或抽油桿的自動(dòng)拉、送和排放[7-10]3種工作方式。
針對(duì)修井作業(yè)要求,設(shè)計(jì)了一套小修作業(yè)一體化設(shè)備,包括動(dòng)力貓道、扶管機(jī)械手、移動(dòng)液壓鉗、動(dòng)力卡瓦、動(dòng)力吊卡及接污筒等,成套設(shè)備集中控制,可實(shí)現(xiàn)臺(tái)面無人化。本文分析了扶管機(jī)械手的各項(xiàng)運(yùn)動(dòng)特性,為設(shè)計(jì)改進(jìn)提供數(shù)據(jù)支撐。
1 結(jié)構(gòu)組成
扶管機(jī)械手通過機(jī)械手支座固定在工作平臺(tái)上,由前后4個(gè)臂架組成,4個(gè)臂架通過連接座組成2套平行四邊形結(jié)構(gòu),可實(shí)現(xiàn)機(jī)械手抓手前部始終處于水平運(yùn)動(dòng)狀態(tài)。
扶管機(jī)械手的前后移動(dòng)由1個(gè)油缸推動(dòng)實(shí)現(xiàn);抓手開合由另1個(gè)小油缸實(shí)現(xiàn);抓手上有接管導(dǎo)向板和滾輪,方便油管上下移動(dòng)。如圖1所示。
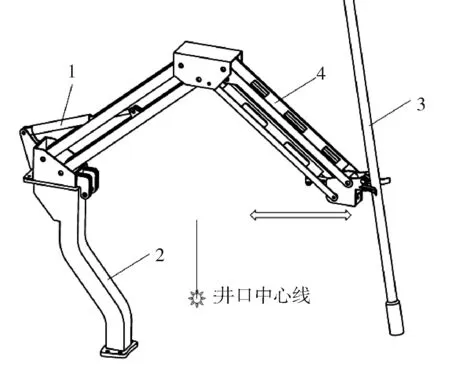
1—油缸;2—基座;3—油管;4—機(jī)械手臂架。
2 虛擬樣機(jī)設(shè)計(jì)計(jì)算

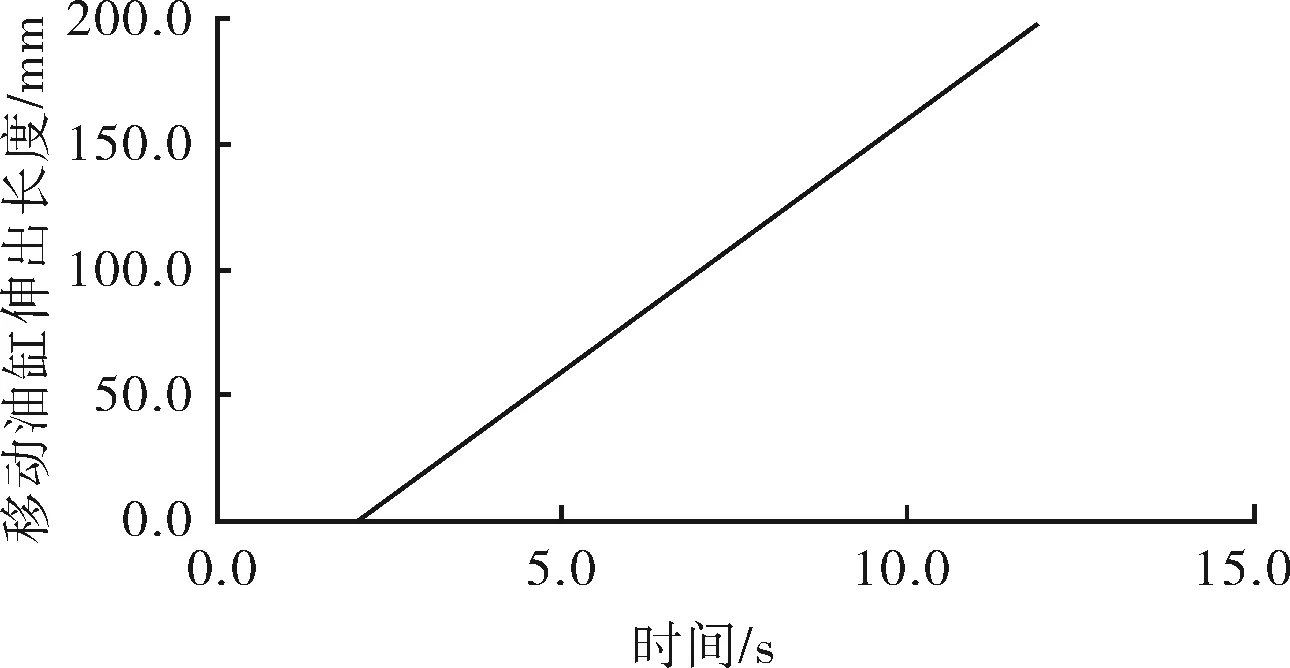
圖2 移動(dòng)油缸隨時(shí)間伸出長度曲線
提取油管的靠力曲線如圖3所示。油管在0~0.3 s自由擺動(dòng);0.3~0.5 s油管與抓手靠上并產(chǎn)生沖擊載荷,沖擊載荷峰值為933 N;0.5~2.0 s油管穩(wěn)定,等待機(jī)械手運(yùn)動(dòng),靠力穩(wěn)定載荷為105 N;2.0~12.0 s油管隨機(jī)械手運(yùn)動(dòng)至井口中心,扶管力逐漸減小。
臂架油缸推力隨時(shí)間變化曲線如圖4所示,根據(jù)整個(gè)運(yùn)動(dòng)過程中臂架油缸的推力變化,可以選擇合適的油缸及油壓,對(duì)液壓系統(tǒng)設(shè)計(jì)提供參考。由圖4可知,在0~0.3 s,臂架處于展開狀態(tài),且油管未接觸,油缸拉力穩(wěn)定在2 651 N;在0.3~0.5 s,油管靠上機(jī)械手抓手,油缸拉力減小到2 095 N,此處拉力減小是因?yàn)楸奂芴幱谡归_狀態(tài),由于自重力會(huì)有繼續(xù)前傾的趨勢,而油管靠力與前傾力方向相反,正好抵消一部分作用力;在0.5~2.0 s,機(jī)械手處于穩(wěn)定等待階段,油缸拉力穩(wěn)定在2 109 N;在2.0~ 12.0 s,油缸推力因臂架重心逐漸后移而逐漸減小,在12.0 s時(shí),油缸拉力為964 N。
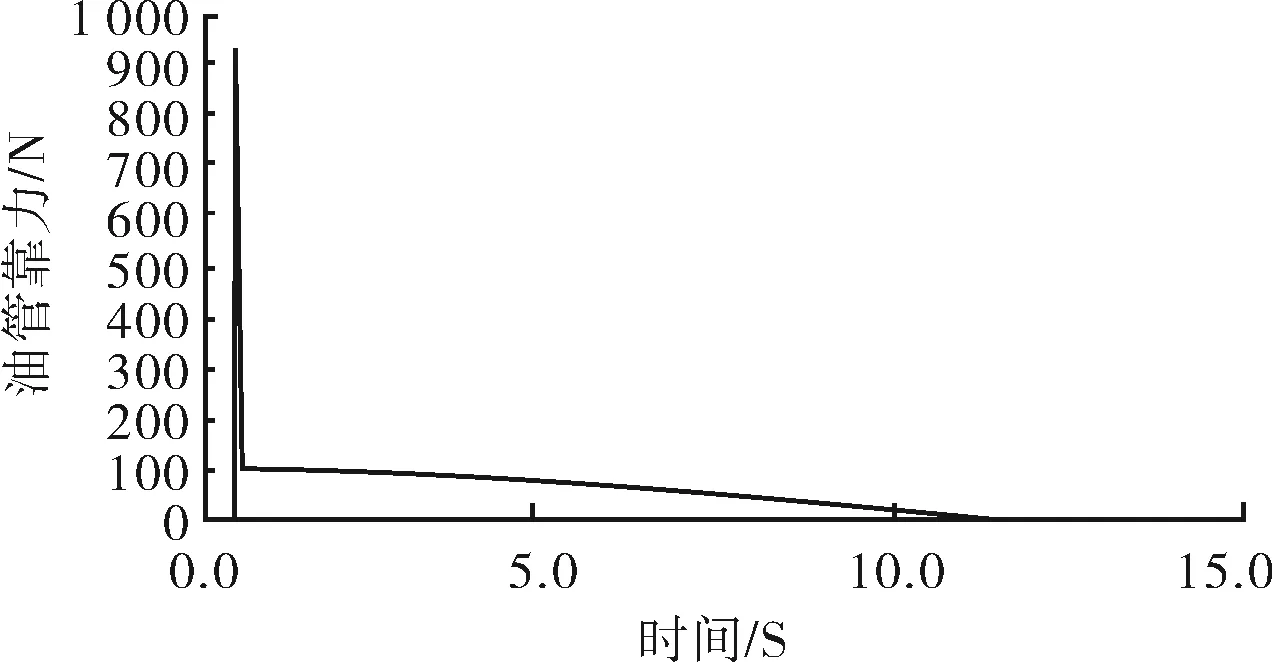
圖3 油管靠力隨時(shí)間變化曲線
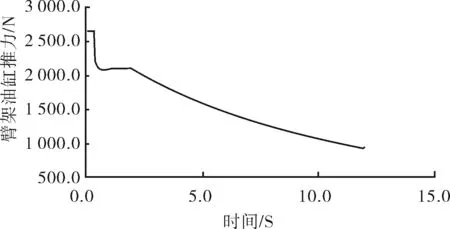
圖4 臂架油缸推力隨時(shí)間變化曲線
提取運(yùn)動(dòng)過程中,后主臂與臂架展開抓手的水平位移間的運(yùn)動(dòng)關(guān)系,如圖5所示。由圖5可知,油缸移動(dòng)和抓手前后移動(dòng)近似成線性關(guān)系,機(jī)械手展開最大位置是距離后主臂鉸點(diǎn)2 330 mm;后主臂轉(zhuǎn)動(dòng)27.8°后,機(jī)械手展開位置是距離后主臂鉸點(diǎn)1 130 mm。線性比例關(guān)系為(2 330-1 130)/27.8=43.1 mm/(°)。可運(yùn)用此比例關(guān)系在機(jī)械手臂架上安裝傾角傳感器來控制臂架的運(yùn)動(dòng)軌跡。
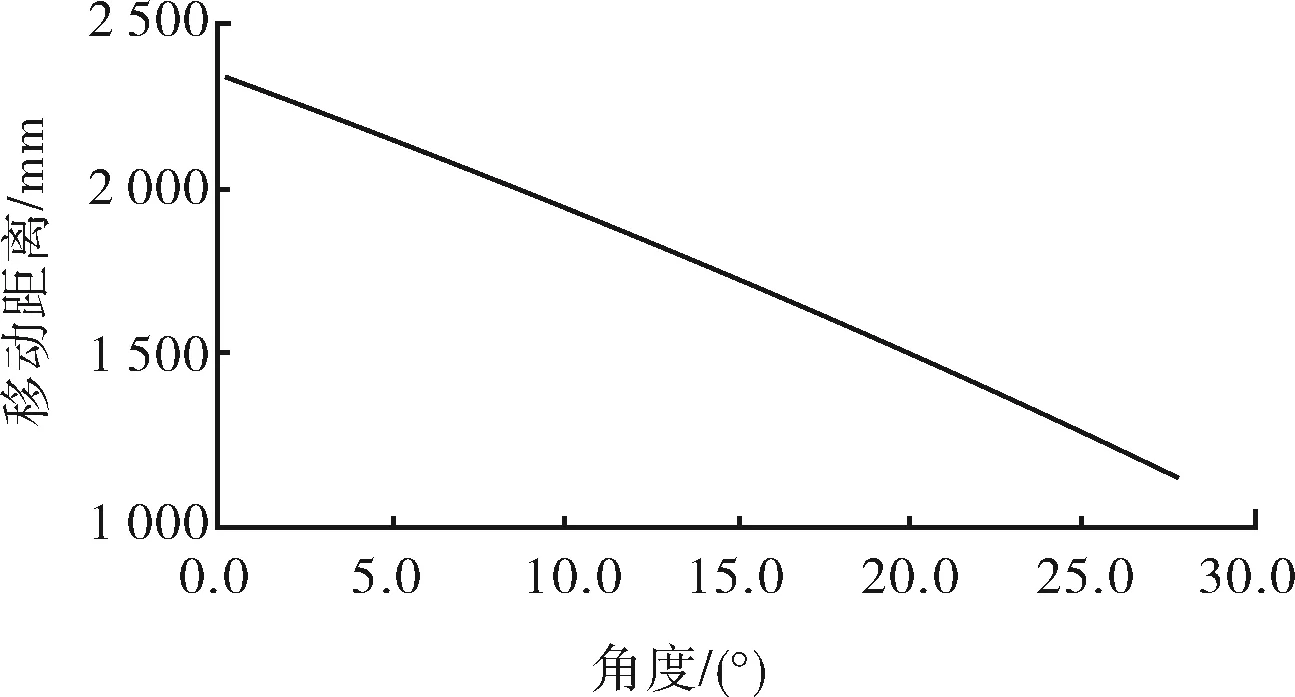
圖5 后主臂與抓手前后移動(dòng)關(guān)系曲線
3 剛?cè)狁詈戏治?/h2>
采用三維建模軟件Pro/e對(duì)扶管機(jī)械手的零部件進(jìn)行簡化,建立機(jī)械手的三維模型;對(duì)臂架的4個(gè)臂及基座進(jìn)行柔性化處理。將臂分別導(dǎo)入ANSYS中劃分網(wǎng)格,定義材料彈性模量為2.1×105MPa,泊松比0.3,密度為7 850 kg/m3。臂架的各鉸點(diǎn)位置建立關(guān)鍵點(diǎn),采用MASS21質(zhì)量單元?jiǎng)澐志W(wǎng)格,關(guān)鍵點(diǎn)和孔面的節(jié)點(diǎn)用剛性區(qū)域連接,用ANSYS的ADAMS接口導(dǎo)出柔性體的模態(tài)中性文件(MNF文件),導(dǎo)出MNF文件要注意單位換算,可在ADAMS中導(dǎo)入模型后核對(duì)。剛?cè)狁詈夏P腿鐖D6所示。
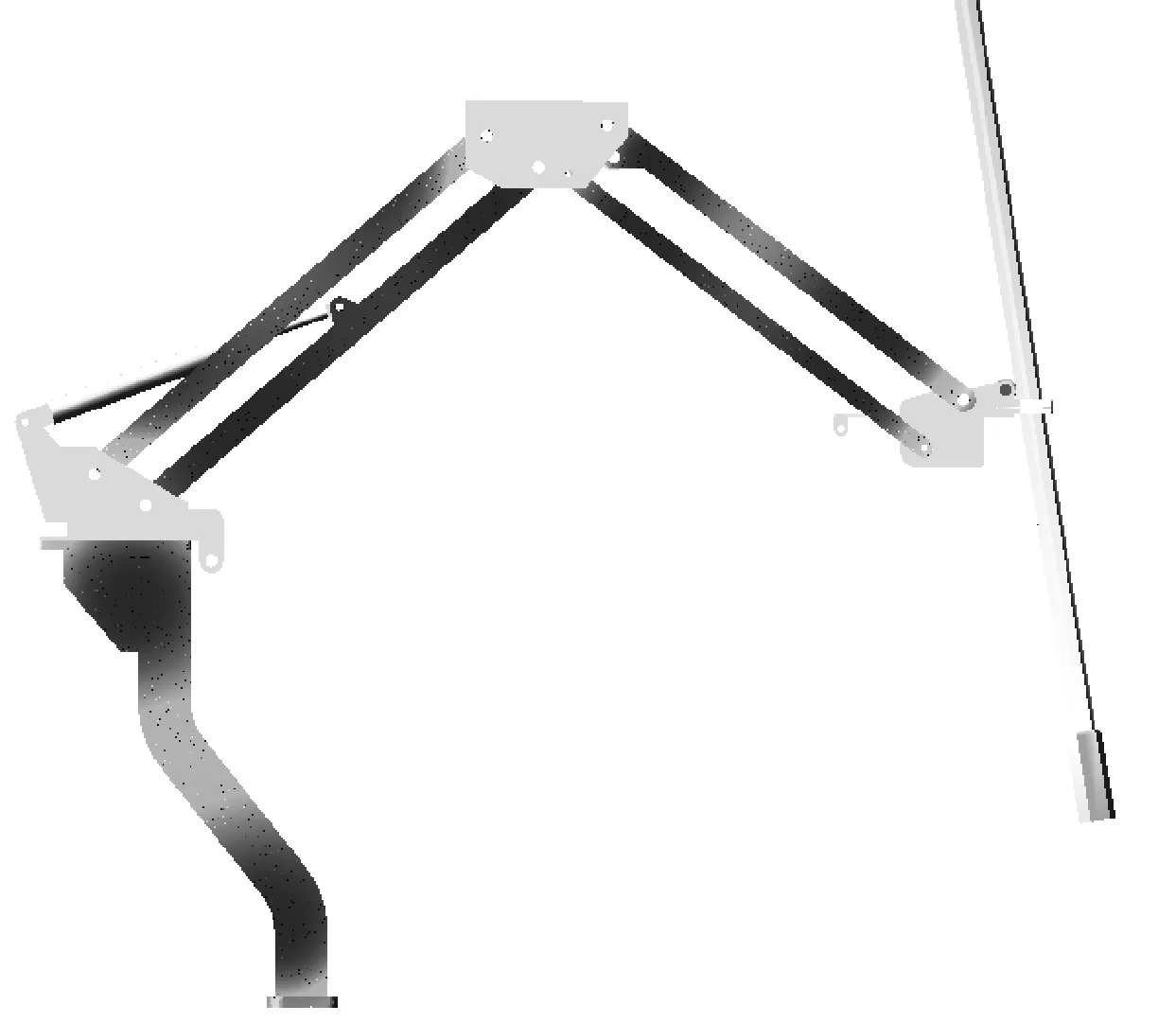
圖6 剛?cè)狁詈夏P?/p>
在柔性體分析中,定義各鉸點(diǎn)鉸接關(guān)系,油缸采用STEP函數(shù)驅(qū)動(dòng),函數(shù)定義為:STEP(time,1,0,1.5,-47.5)+STEP(time,5.5,0,6,47.5),提取機(jī)械手末端抓手的豎直方向和水平方向位移曲線。如圖7~10所示。
根據(jù)圖7~10可知,末端抓手存在振動(dòng)現(xiàn)象,同實(shí)際情況相符;振動(dòng)幅度在豎直方向上相對(duì)剛體曲線主要是向下的振動(dòng),最大偏差3 mm左右,主要是油管靠力對(duì)機(jī)械手造成壓力變形。水平方向上,在0~1.0 s油缸等待階段,靠力最大,產(chǎn)生的水平振動(dòng)也越大;隨著油管隨臂架往井口中心移動(dòng),油管靠力逐漸減小,對(duì)抓手水平方向的影響也逐漸減小;在6.0 s后,油管到井口中心,抓手在0點(diǎn)附件上下振動(dòng)。振動(dòng)幅度在2 mm左右。

圖7 末端抓手水平方向位移對(duì)比

圖8 末端抓手水平方向偏差
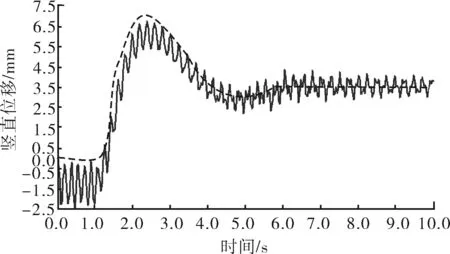
圖9 末端抓手豎直方向位移對(duì)比
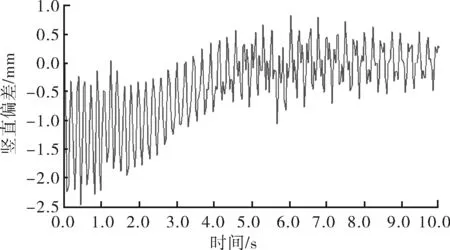
圖10 末端抓手豎直方向偏差
保持油缸總行程及運(yùn)動(dòng)時(shí)間不變,定義不同的油缸運(yùn)動(dòng)加速時(shí)間和勻速度,加速時(shí)間為0.5 s,勻速度47.5 mm/s。修正油缸加速時(shí)間及勻速度分別為0.1 s和45 mm/s。函數(shù)定義為:
STEP(time,1,0,1.1,-45)+STEP(time,5.9,0,6,45),對(duì)比不同加速度下末端抓手的水平和豎直位移偏差,如圖11~12所示。
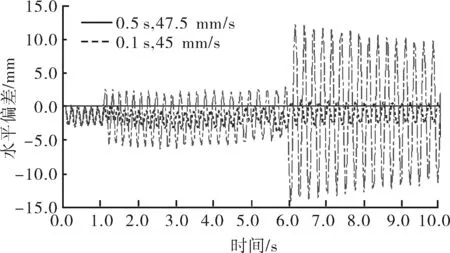
圖11 末端抓手水平方向偏差對(duì)比
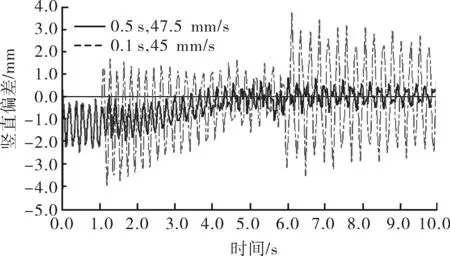
圖12 末端抓手豎直方向偏差對(duì)比
根據(jù)圖11~12可知,不同油缸加速度下,對(duì)機(jī)械手末端抓手的水平及豎直方向位移偏差影響較大。在0~1.0 s等待期,振幅相同;在1.0~6.0 s運(yùn)動(dòng)階段,加速度大,造成的振幅也較大;在6.0~10.0 s停止階段,加速度大,造成的振幅更大,水平振動(dòng)達(dá)到15 mm,豎直振動(dòng)達(dá)到4 mm。設(shè)計(jì)要求機(jī)械手能夠準(zhǔn)確停在井口中心位置,方便上下油管對(duì)扣,這就要求控制油缸的啟動(dòng)及停止加速度,避免末端抓手有較大振動(dòng)。
4 結(jié)語
利用ADAMS剛體運(yùn)動(dòng)分析,得到扶管機(jī)械手的各項(xiàng)理論運(yùn)動(dòng)特性,為油缸動(dòng)力設(shè)計(jì)選型及后續(xù)結(jié)構(gòu)強(qiáng)度計(jì)算提供了理論依據(jù)。利用ANSYS和ADAMS聯(lián)合仿真,分析得到柔性體結(jié)構(gòu)更加符合實(shí)際工況,機(jī)械手末端抓手存在振動(dòng),且振動(dòng)幅度隨油缸運(yùn)動(dòng)特性變化。在不影響運(yùn)動(dòng)效率的前提下,油缸運(yùn)行越平穩(wěn),末端抓手的振動(dòng)幅度越小,越容易控制。需對(duì)臂架結(jié)構(gòu)剛度進(jìn)一步加強(qiáng),同時(shí)優(yōu)化液壓系統(tǒng),避免急啟急停,造成振動(dòng)激勵(lì)。
[1] 何鴻.鉆井平臺(tái)鉆桿自動(dòng)化排放系統(tǒng)方案設(shè)計(jì)[J].石油礦場機(jī)械,2012,41(9):82-84.
[2] 張洪生,楊帆,姚璐璐,等.陸地鉆機(jī)桅桿式鉆桿自動(dòng)排放系統(tǒng)研究[J].機(jī)械制造,2012(2):43-44.
[3] 童征,鄭立臣,牛海峰,等.陸地鉆機(jī)用二層臺(tái)管具排放系統(tǒng)設(shè)計(jì)[J].石油機(jī)械,2011,39(8):27-29.
[4] 熊楚良,黃松和,朱鵬飛.碼垛機(jī)器人剛?cè)狁詈蟿?dòng)力學(xué)仿真分析[J].包裝工程,2015,10(19):84-88.
[5] 王江勇,王基生,張俊俊,等.單自由度柔性機(jī)械臂剛?cè)狁詈蟿?dòng)力學(xué)仿真研究[J].機(jī)械設(shè)計(jì)與制造,2012(12):54-56.
[6] 肖易萍,常玉連,李晉,等.扶正機(jī)械手推送油管的機(jī)液聯(lián)合仿真分析[J].石油礦場機(jī)械,2011,40(1):51-54.
[7] 王巖.新型修井作業(yè)油管移運(yùn)自動(dòng)化系統(tǒng)設(shè)計(jì)與仿真[D].大慶:東北石油大學(xué),2011.
[8] 耿玉廣,谷全福,孫連會(huì),等.小修作業(yè)遠(yuǎn)程起下管柱裝置的研制[J].石油機(jī)械,2015,43(10):96-101.
[9] 張喜慶,沈君芳,牟忠良,等.油田修井作業(yè)自動(dòng)化裝備研制[J].石油礦場機(jī)械,2015,44(9):64-67.
[10] 常玉連,姜開勛,攀巖松,等.鉆修井作業(yè)中管柱處理系統(tǒng)的技術(shù)發(fā)展[J].石油機(jī)械,2012,40(1):87-94.
Racking Platform Pipe-handling Robot Virtual Prototype Design
JIAO Weigang,ZHU Keqiang,HU Ying,HU Songqiao
(HunanBranch,SanyGroupCo.,Ltd.,Changsha410100,China)
In order to reduce platform worker frequent tripping operation,the Racking Platform Pipe-handling Robot is used to replace worker to handle the dangerous work in platform.In this paper,joint simulation analysis software ADAMS and ANSYS simulation are used to analyze all movement parameters of the Pipe-handling Robot from the cat to the well,for the subsequent dynamic selection it provides a theoretical basis for design,the analysis method of rigid-flexible coupling was the simulation for the end gripper jitter under different oil cylinder acceleration power,for the power selection,design improvements provides date support,shorten the design cycle.Keywords:workover rig;pipe-handling robot;ANSYS;ADAMS;rigid-flexible coupling;virtual prototype
2016-09-18 作者簡介:焦偉剛(1982-),男,河南內(nèi)黃人,主要從事石油機(jī)械設(shè)備產(chǎn)品設(shè)計(jì)及研發(fā)工作,E-mail:fyxyd@163.com。
1001-3482(2017)02-0035-04
TE935
A
10.3969/j.issn.1001-3482.2017.02.008
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
故事大王(2016年7期)2016-09-22 17:30:08
計(jì)算物理(2014年2期)2014-03-11 17:01:44
