汽車防碰撞系統設計與制作
2017-03-28 15:26:42朱立宗姚志明許凌志
山東工業技術 2017年4期
朱立宗+姚志明+許凌志

摘 要:利用紅外雷達,及超聲波,毫米波等雷達測距及攝像頭探測汽車前方路況并實時反饋給ECU,由ECU判斷前方障礙物的距離,同時車內攝像頭判斷駕駛員是否注意路況,結合兩者情況并進行監控,實現防碰撞的功能。
關鍵詞:汽車;防碰撞;系統;設計制作
DOI:10.16640/j.cnki.37-1222/t.2017.04.177
0 引言
隨著汽車行駛速度的提高,道路交通的復雜化,以及雨雪霧等復雜天氣的影響,對于行車安全出現了越來越多的隱患。本設計采用紅外雷達,超聲波,納米波等雷達及攝像頭探測前方路況,同時車內攝像頭檢測駕駛員駕駛狀態的防碰撞系統,既可以減少交通事故,又可以減少誤剎率。
系統的組成與工作原理:
1 系統的組成
汽車防碰撞系統的組成部分:超聲波毫米波等測距雷達收發模塊以及紅外側面及后方雷達預警模塊:完成雷達信號的發送和接收;數據采集調制模塊:實時的采集回波信號 ,并且進行相應的數模轉換,以供信息處理系統的使用;信息處理模塊:ECU接收來自數據采集調制系統的信息,并且進行數據分析,從而判斷行駛安全性;聲光報警顯示模塊:主要是兩種測距雷達,即毫米波測距雷達、超聲波測距雷達,雷達產生所需的波頻信號 ,通過聲音和燈光報警 ,根據不同的安全情況 ,進行報警 ,并且對相應信息進行顯示 ;輔助制動模塊:控制電子制動器、離合器等,在緊急情況下輔助駕駛員制動汽車,同時安全帶預緊裝置工作,保護駕駛員;傳感器模塊 :通過汽車轉向系統傳感器 、油門踏板位置傳感器 、制動踏板位置傳感器、溫度、速度等傳感器綜合感知汽車行駛狀態,同時采用室內駕駛員監控攝像頭判斷駕駛員的頭部轉向及眼睛打開程度來判斷駕駛員是否進入疲勞駕駛,從而減少誤警率和虛警率;路況選擇控制模塊 :主要包括系統開關和路況模式選擇開關,控制系統開閉和不同路況模式的選擇,以及輸入鍵盤進行路況控制。
2 系統的工作原理
系統由超聲波測距雷達,納米波測距雷達測量前方障礙物的實時距離,攝像頭判斷前方道路行人的情況,紅外測距雷達測量障礙物的距離,車內攝像頭采集駕駛員頭部轉向及眼睛打開程度,以及通過油門踏板位置傳感器,制動踏板位置傳感器,判斷駕駛員的駕駛狀態,所有雷達及探頭采集到的信息反饋給ECU,通過預先設定的標準值存于ECU中,判斷所反饋的信息是否超過標準值,超過后系統將做出相應的聲光報警或采取緊急制動措施,系統根據速度的快慢,決定制動力矩的大小,從而達到更好的制動效果
3 系統的控制
(1) 硬件控制系統的組成,主要由控制核心MCU宏晶公司生產的STC89C52。該芯片具有價格低廉,性價比高的優點,足以應對該系統的需求。
MCU根據測距模塊輸入的信號進行處理,與系統的標定值進行比較對比,計算測距模塊輸入的信號是否超過標定值,根據超出的百分比進行相應的控制信號輸出,當測距模塊輸入的數值超過標定值,系統開始出現警示燈亮,當該數值超過標定值的百分之五進行蜂鳴器的報警,當輸入數值超過百分之十,人體的剎車反應無法趕上碰撞之前把車剎停的一個數值時,系統進行自主剎車,同時系統將根據速度的快慢進行不同力矩的剎車,只要駕駛員有踩剎車的動作,系統將會停止剎車,由駕駛員來完成。
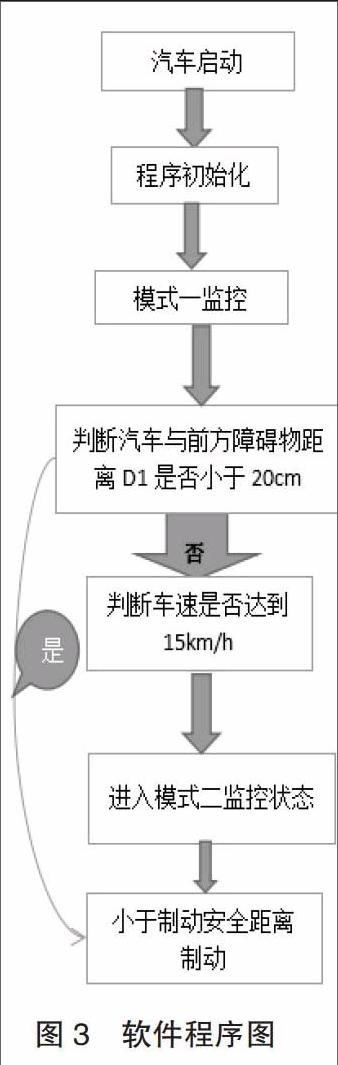
(2)軟件系統的設計,汽車啟動,程序初始化,判斷車速是否到達監控模15km/h,判斷汽車與前方障礙物的距離,是否小于安全距離D1,小于安全距離D1汽車制動,當踩下剎車,程序松開自動剎車。車速到達15km/h進入監控模式二、當汽車進入安全距離時,汽車警示燈閃爍,當汽車進入制動安全距離,系統產生制動力。軟件程序圖如圖3所示。
4 數據采集模塊
系統采用HY-SRF05超聲波模塊用于側方位測量,由于實驗條件有限使用的是模型車,所以不采用毫米波雷達。模塊工作原理:采用IO觸發測距,給至少10us的高電平信號;模塊自動發送8個40khz的方波,自動檢測是否有信號返回;有信號返回,通過IO輸出一高電平,高電平持續的時間就是超聲波從發射到返回的時間.測試距離=(高電平時間*聲速(340M/S))/2;本模塊可提供全套測距程序:C51,PIC18F877,超聲波LCD1602顯示,超聲波LCD12864顯示,數碼管顯示,串口顯示等,測距參考程序。攝像頭采用行車紅外攝像頭。
5 系統執行模塊
執行模塊由蜂鳴器,LED等,步進電機組成,步進電機驅動制缸完成制動任務。步進電機采用QS-M42 伺服電機監控電機搭載的編碼器的反饋調整電流值,因此即使在急劇的負載變化或急加速時也不會失步,可持續運轉,可在低速區域內輸出高轉矩,因此可用于頻繁實施急加速急停的高速寸動動作及旋轉臺控制。步進電機與指令同步動作,因此不存在對脈沖指令的響應延遲。根據電機的負載狀態控制電流,大幅減少了步進電機所特有的發熱及振動。進行控制時,不必擔心發熱或振動,定位停止時無振蕩。
6 結束語
在設計的過程中,充分考慮了系統的可行性,及設備的工作性能等方面。采用超聲波,攝像頭等雷達來達到測距的目的,達到了實時監測路況,近距離報警,安全距離內剎車的功能,能夠對汽車起到安全保護作用。該系統操作簡單,工作穩定,具有一定的實用性。
參考文獻:
[1]李朝青,劉艷玲編著.單片機原理及接口技術(第四版)[J].
[2]劉樹峰,呂釗欽編著.多路況下汽車防碰撞及行人保護預警系統設計[J].
[3]秦波,徐仕斌,徐瑤,廖禎芳編著.模型汽車防碰撞系統的設計[J].
[4]金桐,張保平編著.防碰撞無線通信汽車黑匣子的系統設計[J].
[5]陳中,朱代忠編著.基于STC89C52單片機的控制系統設計[J].
本文系廣西科技大學2016年自治區級大學生創新創業訓練計劃項目《汽車防碰撞系統設計與制作》成果。
作者簡介:朱立宗(1980-),廣西貴港人,講師,主要從事載運工具運用工程、CAE、職業教育研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
