光電系統(tǒng)光軸與機械軸同軸度測試方法
2017-03-30 08:11:29高洋洋景文博尹超平王曉曼張汝平
長春理工大學(xué)學(xué)報(自然科學(xué)版) 2017年1期
高洋洋,景文博,尹超平,王曉曼,張汝平
(1.長春理工大學(xué)電子信息工程學(xué)院,長春 130022;2.長春理工大學(xué)光電工程學(xué)院,長春 130022;3.大陸汽車電子(連云港)有限公司,長春 130000)
光電系統(tǒng)光軸與機械軸同軸度測試方法
高洋洋1,景文博2,尹超平3,王曉曼1,張汝平1
(1.長春理工大學(xué)電子信息工程學(xué)院,長春 130022;2.長春理工大學(xué)光電工程學(xué)院,長春 130022;3.大陸汽車電子(連云港)有限公司,長春 130000)
同軸度是光學(xué)系統(tǒng)的重要技術(shù)指標(biāo)。目前比較先進的方法是利用激光準(zhǔn)直方法測量同軸度,但其僅僅認(rèn)為同軸度屬于二維的范疇,忽略了其三維空間性,即在三維空間里水平與俯仰方向同軸度之間的相互影響。因此,提出一種基于三維空間建模的方法,對同軸度進行測試。首先,建立機械軸與光軸的空間關(guān)系模型;其次,定位光斑質(zhì)心;再次,對獲得的光斑圖像坐標(biāo),進行圓軌跡擬合;最后,將光斑圓軌跡上的任一點坐標(biāo)代入到光軸與機械軸的旋轉(zhuǎn)模型,即可獲得二者的同軸度。實驗結(jié)果表明:俯仰偏轉(zhuǎn)角度對水平偏轉(zhuǎn)角度的影響不可忽略,該方法使水平方向的同軸度測量精度得到顯著提高。此方法對于同軸度的評估具有十分重要的應(yīng)用價值。
同軸度;高分辨率CCD;光斑質(zhì)心亞像素定位;旋轉(zhuǎn)矩陣
炮口軸線的偏差是影響坦克射擊精度的重要因素之一,這就要求標(biāo)校火炮炮口線的光電系統(tǒng)有非常出色的質(zhì)量,即高標(biāo)準(zhǔn)的精度。但是在集成組裝光電系統(tǒng)的時候難免會使電子校炮鏡的光軸與外部套筒的機械軸發(fā)生偏離,所以對電子校炮鏡的同軸度的精確檢測是保證該光電系統(tǒng)精度的關(guān)鍵。
同軸度的測量方法有很多,主要包括目視瞄準(zhǔn)靶板法、平行光管法[1]、火炮瞄準(zhǔn)激光光電靶法、基于圖像處理的投影靶板法等[2],大多是利用光學(xué)方法、機械方法,或者是兩者相結(jié)合的方法,不但過程復(fù)雜,而且使用的儀器和設(shè)備也不是十分先進,基本都需要人工判讀或者人工目視瞄準(zhǔn),這其中摻雜著大量的人為干擾因素,測量精度不是很高[3]。本文采用的圖像處理技術(shù)和機器視覺相結(jié)合的檢測模式,彌補了人眼識別率有限和不穩(wěn)定的不足,并且把思考方式從二維平面提升到了三維空間,從三維空間關(guān)聯(lián)性入手,充分地考慮了造成同軸度誤差的角度影響因素,有效地保證了測量精度。
1 同軸度測量系統(tǒng)工作原理
圖1為光電系統(tǒng)同軸度測量示意圖。同軸度是指校炮鏡光軸對火炮機械軸的變動量,如果該變動量的值為零,則代表這兩條軸線同軸,即利用標(biāo)準(zhǔn)炮口來測試光電系統(tǒng)的同軸度。首先,使平行光光管發(fā)出的平行光光軸與標(biāo)準(zhǔn)炮口的機械軸重合;其次,將校炮鏡放到標(biāo)準(zhǔn)炮口里面,光斑成像在上位機顯示界面上;最后,對采集到的光斑位置與成像界面的中心位置進行比較,若校炮鏡光軸與標(biāo)準(zhǔn)炮口的機械軸重合,則光斑顯示成像界面的中心位置,代表二者同軸,否則,成像在除中心以外其他的位置,代表二者不同軸。

圖1 光電系統(tǒng)同軸度測量系統(tǒng)工作原理圖
根據(jù)CCD成像原理建立空間坐標(biāo)系,如圖2所示。以鏡頭處為坐標(biāo)原點,鏡頭焦距為f,空間直角坐標(biāo)系OXYZ的Z軸與機械軸重合,空間直角坐標(biāo)系OX'Y'Z'的Z'軸與校炮鏡的光軸重合,A1A'1代表炮口的機械軸空間指向,B1B'1代表校炮鏡的光軸空間指向,點A'1是CCD視場的中心,點B'1表示機械軸與光軸不重合時平行光光斑位置。對于空間直角坐標(biāo)系OX'Y'Z',相當(dāng)于對空間直角坐標(biāo)系OXYZ繞X旋轉(zhuǎn)α角度,繞Y軸旋轉(zhuǎn)β角度,形成新的空間直角坐標(biāo)系。其中,繞X軸旋轉(zhuǎn),可以對俯仰角度進行調(diào)整,繞Y軸旋轉(zhuǎn),可以對水平角度進行調(diào)整。

圖2 同軸度模型
根據(jù)機械軸與光軸的空間關(guān)系特性,可以通過以下原理,求得二者的同軸度。
2 機械軸與光軸的三維空間特性


假設(shè)A'1先繞X軸旋轉(zhuǎn),再繞Y軸旋轉(zhuǎn),得到新的空間點A"1,其坐標(biāo)為:




其中,α表示俯仰方向的角度,β表示水平方向的角度,二者的角度單位是秒。
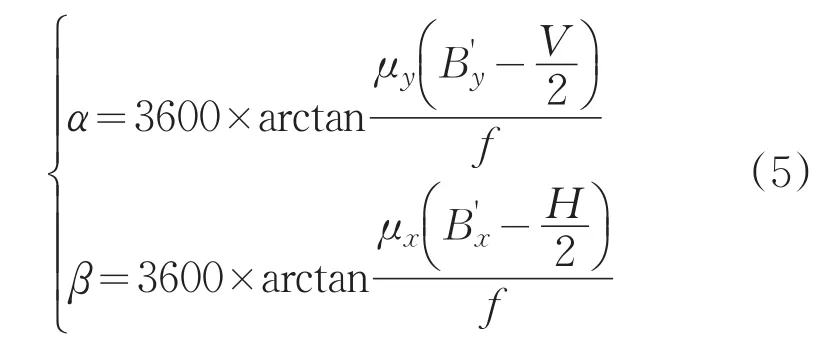
通過上面的三維旋轉(zhuǎn)模型推導(dǎo)過程,可以很好地解釋機械軸與光軸的三維空間關(guān)系,表明水平方向的偏轉(zhuǎn)角度,不僅受二維空間的自身角度偏轉(zhuǎn)的影響,同時也受到來自于俯仰方向的偏轉(zhuǎn)角度的影響,而激光準(zhǔn)直測量方法[4],是一種基于二維空間的同軸度計算方法,它認(rèn)為水平和垂直兩個方向上的角度,都是通過公式(4)中計算α的思想獲得,如公式(5)所示,它沒有充分地考慮光軸與機械軸的三維空間關(guān)聯(lián)性。
利用圖像學(xué)方法,在已知圖像中光斑成像點的坐標(biāo)時,就可以根據(jù)公式(4)這個旋轉(zhuǎn)模型,計算出光軸與機械軸在水平及俯仰方向的同軸度。
3 光斑質(zhì)心提取
準(zhǔn)確提取光斑質(zhì)心坐標(biāo)是基于圖像處理方法測量精度的關(guān)鍵。首先對圖像進行分割,用以梯度為基礎(chǔ)的邊緣信息引進全局閾值處理[5],得到目標(biāo)的二值圖像;其次,鎖定目標(biāo)區(qū)域;最后利用亞像素算法定位光斑質(zhì)心,原理框圖如圖3所示。

圖3 光斑質(zhì)心提取方法框圖
觀察光斑圖像,它是一種典型的大背景區(qū)域上一個小物體組成的圖像,其直方圖將會有一個較大的波峰。設(shè)f(x,y)是輸入圖像,先用Sobel算子進行邊緣檢測,如圖4所示是Sobel算子模板[6]:
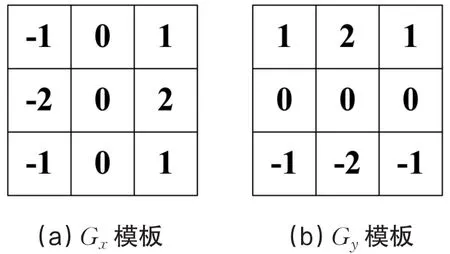
圖4 Sobel算子模板
獲得梯度幅值圖像;對其進行Otsu閾值分割,產(chǎn)生一幅二值圖像gT(x,y),在從f(x,y)中選取對應(yīng)于“強”邊緣像素的下一步中,該圖像用做一幅模板圖像;僅用f(x,y)中對應(yīng)于gT(x,y)中像素值為1的位置的像素計算直方圖;用這個直方圖全局地分割f(x,y),其中Otsu閾值分割公式[7]如(5)所示:

其中,T為閾值。
在二值圖像上手動選取光斑區(qū)域。最后對光斑的質(zhì)心進行計算,具體計算如公式(6),得到光斑質(zhì)心。
4 圓軌跡的擬合技術(shù)
在以像素為單位的光斑圖像中,炮口的機械軸過圖像的中心點,當(dāng)光軸與機械軸不同軸時,多次旋轉(zhuǎn)校炮鏡與標(biāo)準(zhǔn)炮口,目標(biāo)的成像軌跡大致以圓形呈現(xiàn),圓擬合過程如圖5所示:

圖5 圓軌跡擬合
其中,B'0,...,B'n表示n組光斑質(zhì)心位置,Ri代表每個光軸成像點距離機械軸成像點的距離,R代表光斑質(zhì)心擬合后圓軌跡的半徑。在實際圖像中,設(shè)A1'的坐標(biāo)是A1'(xa,ya),B'i的坐標(biāo)是B'i(xa,ya),則Ri及R的計算公式(7)如下所示:

其中,i代表實驗次數(shù)。
這樣,當(dāng)我們已知一個平面圓的圓心及半徑,可通過圓上任意一點帶入到旋轉(zhuǎn)模型公式(4)中,即可知道校炮鏡與炮口的同軸度。
5 實驗數(shù)據(jù)及結(jié)果分析
在實驗過程中,采用分辨率是768×576,像元尺寸是8.3×8.3μm的CCD,焦距是200mm的鏡頭對光斑圖像進行采集。采用光斑質(zhì)心提取算法對圖像進行處理,其過程如圖6所示。其中一幅光斑圖像如(a)所示;其直方圖如(b)所示;首先對光斑圖像進行Sobel算子邊緣檢測,再對其進行Otsu閾值分割,閾值為113,得到一幅梯度幅度圖像(d);(e)為圖(c)與圖(d)之積形成的圖像;圖(f)是圖(e)所示圖像中非零像素的直方圖;(g)以直方圖(f)為基礎(chǔ),用Otsu閾值處理分割圖像的結(jié)果。閾值為68,在該直方圖中處在兩個波峰間的位置。手動選取光斑區(qū)域,再對區(qū)域內(nèi)的光斑進行亞像素質(zhì)心定位,如圖(h)所示。

圖6 光斑質(zhì)心提取
在實際試驗過程中進行10次操作,獲得10組光斑數(shù)據(jù),剔除距離最大值點(383.6263,288.2250)與距離最小值點(382.3358,287.8354),對剩余8組數(shù)據(jù)進行圓擬合,算得圓軌跡半徑為R=0.4025個像素,圓心坐標(biāo)為(384.0383,287.9463),可得光斑軌跡圓如圖7所示:

圖7 圓軌跡擬合
在擬合的軌跡圓上任意選擇一點(384.6075,288.5155),減去偏移量(0.0383,0.0537),得到一個相對于理論中心(384,288)的點(384.5692,288.4518),將此點代入旋轉(zhuǎn)模型公式(4),得知此時光軸與機械軸的同軸度為:

其中,α代表俯仰方向,β代表水平方向。
當(dāng)利用激光準(zhǔn)直方法測量同軸度時,將點(384.5692,288.4518)代入到公式(5)中進行計算,得到二者的同軸度為:

由此可以知道,利用本文推導(dǎo)的三維空間關(guān)系模型,表明俯仰方向偏轉(zhuǎn)角度對水平方向偏轉(zhuǎn)角度的影響不可忽略,此旋轉(zhuǎn)模型使測量精度得到顯著提高,可以很好地計算出光學(xué)系統(tǒng)的同軸度。
6 結(jié)論
在光電系統(tǒng)的同軸度測量系統(tǒng)中,光軸與機械軸軸線間的旋轉(zhuǎn)模型、光斑質(zhì)心的提取及軌跡圓半徑的計算,對同軸度的測試起著十分重要的作用。本文提出的測試方法,能夠高效、便捷地對光電系統(tǒng)同軸度進行測量,而且有效的保證了測量精度,為同軸度的測量提供了可靠、有效的依據(jù)。
[1]劉波.火炮同步精度測試系統(tǒng)研究[D].長春:長春理工大學(xué),2011.
[2]蔡懷宇,李雪鵑.火炮平行性測量系統(tǒng)的設(shè)計[J].光學(xué)技術(shù),2007,33(5):699-701.
[3]鄭江濤.角度同步精度測量系統(tǒng)設(shè)計[D].南京:南京理工大學(xué),2015.
[4]王震.基于圖像處理的測角精度和同軸度測量方法[D].長春:長春理工大學(xué),2012.
[5]Rafael C,Gon zalez.數(shù)字圖像處理[M].第三版.北京:電子工業(yè)出版社,2011.
[6]白俊江,洪春勇.基于Sobel的邊緣檢測方法[J].電腦知識與技術(shù),2009,5(21):5847-5849.
[7]Ma N,Wang J X.Dynamic threshold for SPWVD parameter estimation based on Otsu algorithm[J]. JournalofSystemsEngineeringandElectronics,2013,6(12):919-924.
Artillery Coaxial Precision Test Method
GAO Yangyang1,JING Wenbo2,YIN Chaoping3,WANG Xiaoman1,ZHANG Ruping1
(1.School of Electronics and Information Engineering,Changchun University of Science and Technology,Changchun 130022;2.School of Optoelectronic Engineering,Changchun University of Science and Technology,Changchun 130022;3.Continental Automotive Corporation(LianYunGang)Co.,Ltd,Changchun 130000)
Coaxial degree is an important technical index of optical system.At present,the advanced method is to use the laser collimation method to measure the coaxial degree,But it is only considered that the coaxial degree belongs to two-dimensional category,ignore its three-dimensional space,the mutual influence between horizontal and pitching direction in three dimensional space,therefore,this paper proposes a method based on 3D space modeling to test the coaxial degree.First of all,the establishment of the mechanical axis and the optical axis of the spatial relation model;secondly,facula centroid location;thirdly,the coordinates of spot images are obtained,circular trajectory fitting;finally,the circular spot trajectory coordinates of an arbitrary point substitution to the optical axis and mechanical axis of rotation model,will be awarded two coaxial precision.The experimental results show that:the influence of pitch angle on horizontal deflection can not be ignored,the accuracy of the coaxial degree measurement in horizontal direction is significantly improved.Therefore,this method has very important application value for the evaluation of the coaxial degree.
coaxial degree;high resolution CCD;spot centroid sub pixel localization;rotation matrix
TP391.41
A
1672-9870(2017)01-0089-04
2016-09-05
高洋洋(1987-),女,碩士研究生,E-mail:837027999@qq.com
景文博(1980-),男,副教授,E-mail:wenbojing@sina.com
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電腦報(2019年40期)2019-09-10 07:22:44
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
科技知識動漫(2016年8期)2016-07-29 20:40:09
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21