基于回流能量調(diào)節(jié)的液壓執(zhí)行機(jī)構(gòu)運動位移控制仿真研究
2022-09-20 05:04:44呂文龍張廣毅
機(jī)床與液壓 2022年9期
關(guān)鍵詞:信號
呂文龍,張廣毅
(1.新鄉(xiāng)職業(yè)技術(shù)學(xué)院數(shù)控技術(shù)系,河南新鄉(xiāng) 453000; 2.鄭州大學(xué)機(jī)械與動力工程學(xué)院,河南鄭州 450001)
0 前言
隨著中國制造業(yè)的迅猛發(fā)展,液壓技術(shù)也得到了很大的改進(jìn)。液壓技術(shù)具有傳動穩(wěn)定、抗負(fù)載能力強(qiáng)及響應(yīng)速度快等優(yōu)點,目前廣泛應(yīng)用于工業(yè)機(jī)器人、挖掘機(jī)、汽車及導(dǎo)彈發(fā)射等領(lǐng)域。液壓系統(tǒng)通常由5個部分構(gòu)成:動力元件(液壓泵);執(zhí)行元件(液壓馬達(dá)、液壓缸等);控制元件(液壓閥);輔助元件(油箱、管路蓄能器等);工作介質(zhì)(液壓油)。液壓缸通常用作驅(qū)動系統(tǒng)中的執(zhí)行機(jī)構(gòu),在驅(qū)動過程中能夠獲得較大的力。液壓執(zhí)行機(jī)構(gòu)數(shù)學(xué)模型相對復(fù)雜,存在控制方向未知、比例閥零點不準(zhǔn)確等問題,傳統(tǒng)控制方法很難得到令人滿意的控制效果。因此,研究更好的控制系統(tǒng),對于液壓技術(shù)的發(fā)展至關(guān)重要。
目前,為改善液壓執(zhí)行機(jī)構(gòu)控制系統(tǒng)輸出效果,國內(nèi)外科研工作者對液壓執(zhí)行機(jī)構(gòu)控制系統(tǒng)進(jìn)行了許多理論研究。文獻(xiàn)[3-4]研究了液壓執(zhí)行機(jī)構(gòu)模糊PID控制方法,介紹了變排量液壓馬達(dá)系統(tǒng)原理,設(shè)計了模糊PID控制器,通過模糊規(guī)則對PID參數(shù)進(jìn)行調(diào)節(jié),搭建液壓系統(tǒng)仿真模型,液壓系統(tǒng)在響應(yīng)速度和穩(wěn)定性方面得到了改善。文獻(xiàn)[5-6]研究了液壓執(zhí)行機(jī)構(gòu)神經(jīng)網(wǎng)絡(luò)滑模控制系統(tǒng),建立液壓驅(qū)動平面簡圖模型,推導(dǎo)出液壓缸位置運動方程,利用神經(jīng)網(wǎng)絡(luò)算法對滑模控制器進(jìn)行逼近,采用MATLAB軟件對液壓缸活塞運動軌跡進(jìn)行仿真,提高了液壓執(zhí)行機(jī)構(gòu)運動軌跡的控制精度。文獻(xiàn)[7-8]研究了電液伺服液壓執(zhí)行機(jī)構(gòu)位置的滑模控制方法,建立了液壓執(zhí)行機(jī)構(gòu)簡圖,分析了液壓執(zhí)行機(jī)構(gòu)工作原理,對液壓執(zhí)行機(jī)構(gòu)進(jìn)行數(shù)學(xué)建模,推導(dǎo)出液壓缸流量方程,設(shè)計滑模變結(jié)構(gòu)控制器,通過仿真檢驗了執(zhí)行機(jī)構(gòu)的位置跟蹤效果,液壓執(zhí)行機(jī)構(gòu)運動位置精度得到了提高。以上研究的液壓執(zhí)行機(jī)構(gòu)控制精度雖然有所提高,但是在突變位移信號或者重載狀態(tài)下,其運動位移跟蹤誤差較大。對此,本文作者建立回流能量調(diào)節(jié)的液壓系統(tǒng)模型裝置簡圖,推導(dǎo)液壓流量和動力學(xué)方程。引用滑模控制器并進(jìn)行改進(jìn),設(shè)計超螺旋滑模控制的液壓系統(tǒng)。為從理論上驗證液壓控制系統(tǒng)的穩(wěn)定性,采用李雅普諾夫函數(shù)對超螺旋滑模控制器進(jìn)行驗證,通過MATLAB軟件對液壓執(zhí)行機(jī)構(gòu)運動位移跟蹤信號進(jìn)行仿真,并與傳統(tǒng)滑模控制器的輸出效果進(jìn)行對比,為進(jìn)一步研究液壓執(zhí)行機(jī)構(gòu)運動位移控制系統(tǒng)提供參考。
1 系統(tǒng)數(shù)學(xué)模型
液壓系統(tǒng)模型如圖1所示。液壓泵工作時,將油箱里面的油吸入到液壓缸無桿腔,通過差動閥將有桿腔中的油返回到無桿腔中,從而推動活塞桿快速前進(jìn)。當(dāng)壓力過高時,通過安全閥將油返回到油箱中。
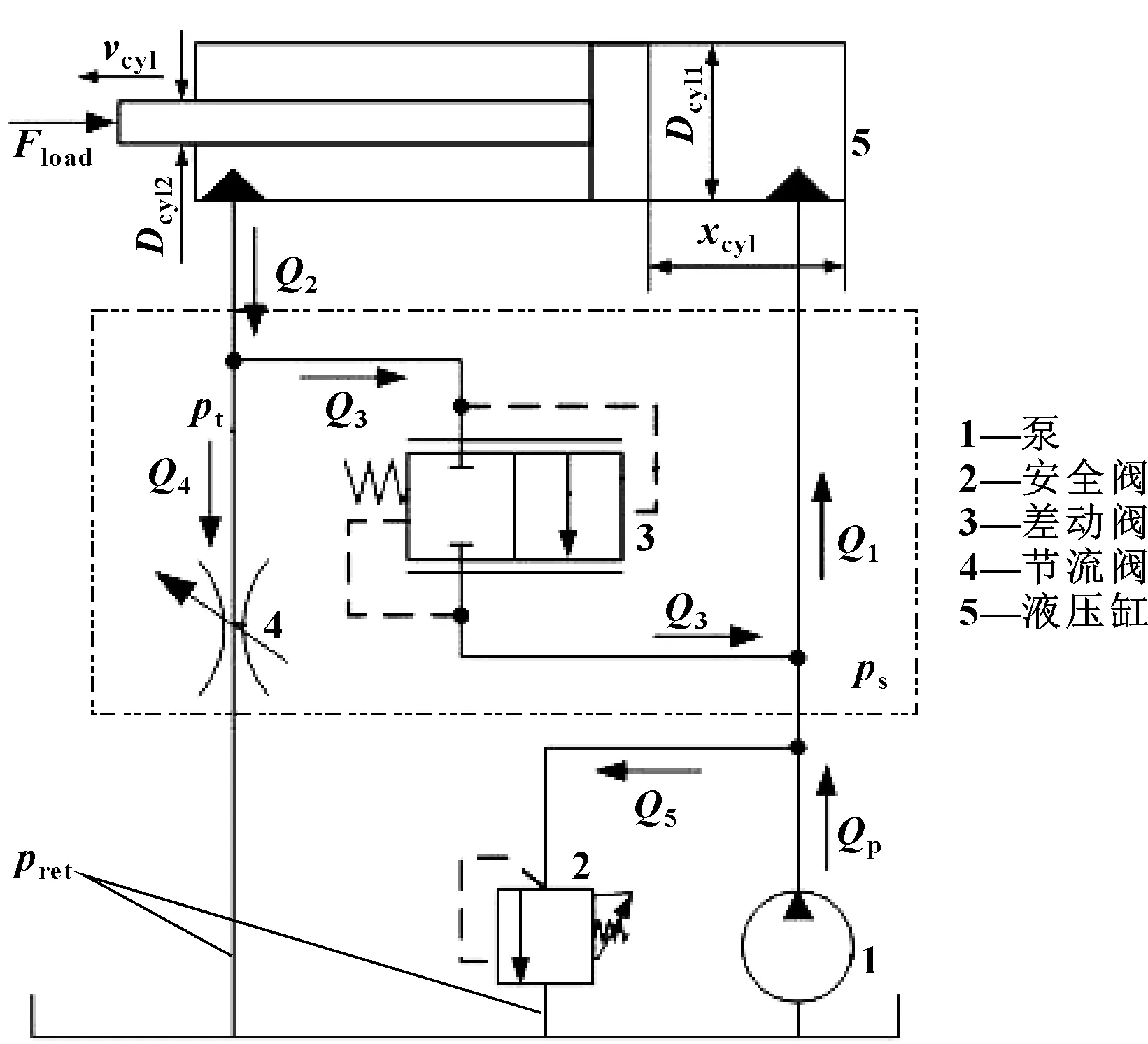
圖1 液壓系統(tǒng)模型
如果沒有通過差動閥的流量,液壓執(zhí)行機(jī)構(gòu)理論速度計算公式為
(1)
式中:=-,為進(jìn)入無桿腔油的流量,為泵的流量,為安全閥的流量;為液壓缸直徑。
在一個帶有差動閥的系統(tǒng)中,執(zhí)行機(jī)構(gòu)的回流被引導(dǎo)回供給管路,使用相同的定速泵可以顯著改變活塞桿的速度,獲得的連桿速度可能低于、等于或高于返回運動速度,但是活塞速度的計算復(fù)雜得多,因為=-+,其中:差動閥的流量取決于有效負(fù)載和節(jié)流閥設(shè)置,則泵產(chǎn)生的流量數(shù)學(xué)模型可以定義為
(2)
式中:為啟動時間。
供給管路的壓力隨時間變化的計算公式為

(3)
式中:為流體體積模量;為活塞運動位移;為活塞無桿腔截面積;為供給管路體積。
同樣,節(jié)流閥壓力隨時間變化的計算公式為

(4)
式中:為液壓缸有桿腔的流出流量;為差動閥的流量;為通過節(jié)流閥的流量;為活塞桿的截面積;為負(fù)載管路體積。
活塞桿運動速度和加速度分別定義為
(5)

(6)
式中:為供給管路壓力;為負(fù)載管路壓力;為負(fù)載;為阻尼系數(shù);為活塞質(zhì)量。
根據(jù)活塞桿運動速度,得到和分別為
=
(7)
=(-)
(8)
差動閥升程運動方程為

(9)
(10)
式中:為差動閥的直徑;為差動閥的速度;為阻尼系數(shù);為剛度系數(shù);為摩擦因數(shù);為差動閥的質(zhì)量。
根據(jù)伯努利方程,差動閥流量方程為
(11)
=π
(12)
式中:為差動閥的間隙;為差動閥流量系數(shù);為流體密度。
節(jié)流閥流量的計算方法與類似,只是在這種情況下,節(jié)流間隙有一個固定區(qū)域,具體取決于。操作員可使用閥門旋鈕調(diào)整間隙區(qū)域。當(dāng)回流管壓力低于負(fù)載管壓力時,計算公式為
(13)
式中:為回油管壓力;為節(jié)流閥流量系數(shù);為節(jié)流閥的間隙。
通過安全閥的流量的運動方程具有以下形式:
(14)
(15)
初始彈簧張力,在供應(yīng)管路中的壓力超過20 MPa時提供閥門開啟所需的力。在這種情況下,形成直徑為、寬度為的圓柱形間隙。因此,流量計算公式為
(16)
其中:
=π
(17)
2 控制系統(tǒng)
2.1 超螺旋滑模控制
超螺旋滑模控制是對傳統(tǒng)滑模控制的改進(jìn),是一種高階滑模控制方法,能夠使滑動變量和對應(yīng)的導(dǎo)數(shù)趨向于零,有效降低滑模控制器的抖動幅度。
液壓系統(tǒng)狀態(tài)變量設(shè)置為

(18)
液壓系統(tǒng)執(zhí)行機(jī)構(gòu)位置表達(dá)式定義為
(19)
式中:、、為未知參數(shù);為流量控制方向;=Δ+,Δ為零點偏離信號,為外部干擾;為控制信號。
假設(shè)1:輸入信號的導(dǎo)數(shù)為連續(xù)有界。
控制系統(tǒng)誤差變量設(shè)置為
(20)
滑模面定義為
=++
(21)
對滑模面進(jìn)行求導(dǎo)后得到:
′=++++++-?
(22)
超螺旋滑模控制器設(shè)計為
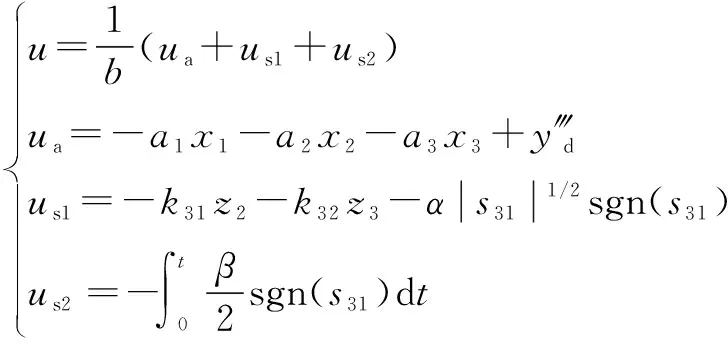
(23)
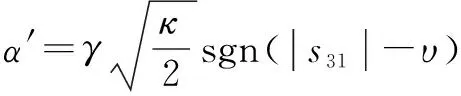
=2
(24)
式中:、為控制器時變增益;、、、為任意正數(shù)。
采用超螺旋滑模控制的液壓執(zhí)行機(jī)構(gòu)控制流程如圖2所示。
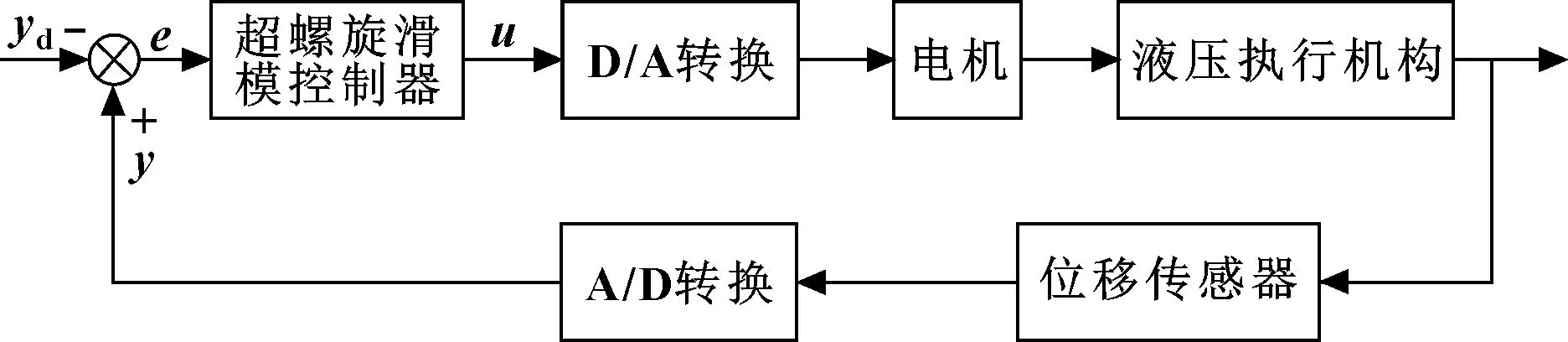
圖2 液壓執(zhí)行機(jī)構(gòu)位移控制
2.2 控制系統(tǒng)穩(wěn)定性分析
根據(jù)李雅普諾夫函數(shù)可得:
(25)
對公式(25)求導(dǎo)可得:
′=(++++++
-?)
(26)
將式(23)(24)代入式(26)得:
′=

(27)
(28)
則′可以表示為
′=[-||12sgn()-sgn()]
(29)
若>0,則式(29)變?yōu)?/p>
′=-||32-(-)||
(30)
即只要>,就可以得到′<0。
若<0,則式(29)變?yōu)?/p>
′=-||32-(+)||
(31)
即只要>-,就可以得到′<0。
由以上分析可知,選取合適的參數(shù),滿足以上條件時就可以得到′<0。根據(jù)李雅普諾夫穩(wěn)定性判別定理,可得超螺旋滑模控制系統(tǒng)是穩(wěn)定的。
3 結(jié)果與分析
通過仿真實驗驗證滑模控制器和超螺旋滑模控制器的控制效果,采用MATLAB軟件對液壓執(zhí)行機(jī)構(gòu)運動位置跟蹤誤差進(jìn)行仿真,并對仿真結(jié)果進(jìn)行對比和分析。仿真初始參數(shù)如表1所示。
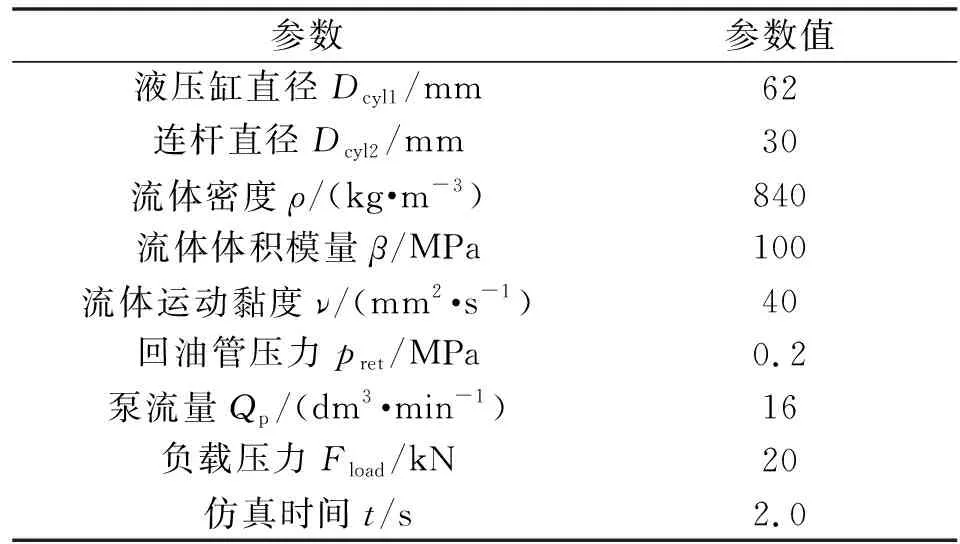
表1 仿真參數(shù)
假設(shè)執(zhí)行機(jī)構(gòu)運動位移為正弦波信號和階躍波信號,在無負(fù)載狀態(tài)下,液壓執(zhí)行機(jī)構(gòu)正弦波、階躍波信號跟蹤結(jié)果分別如圖3、圖4所示。在有負(fù)載狀態(tài)下,液壓執(zhí)行機(jī)構(gòu)正弦波、階躍波信號跟蹤結(jié)果分別如圖5、圖6所示。
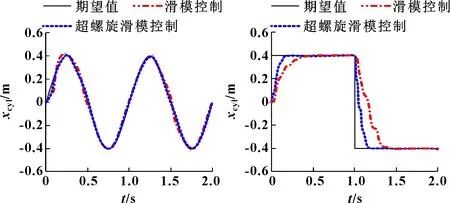
圖3 正弦波信號跟蹤(Fload=0) 圖4 階躍波信號跟蹤(Fload=0)
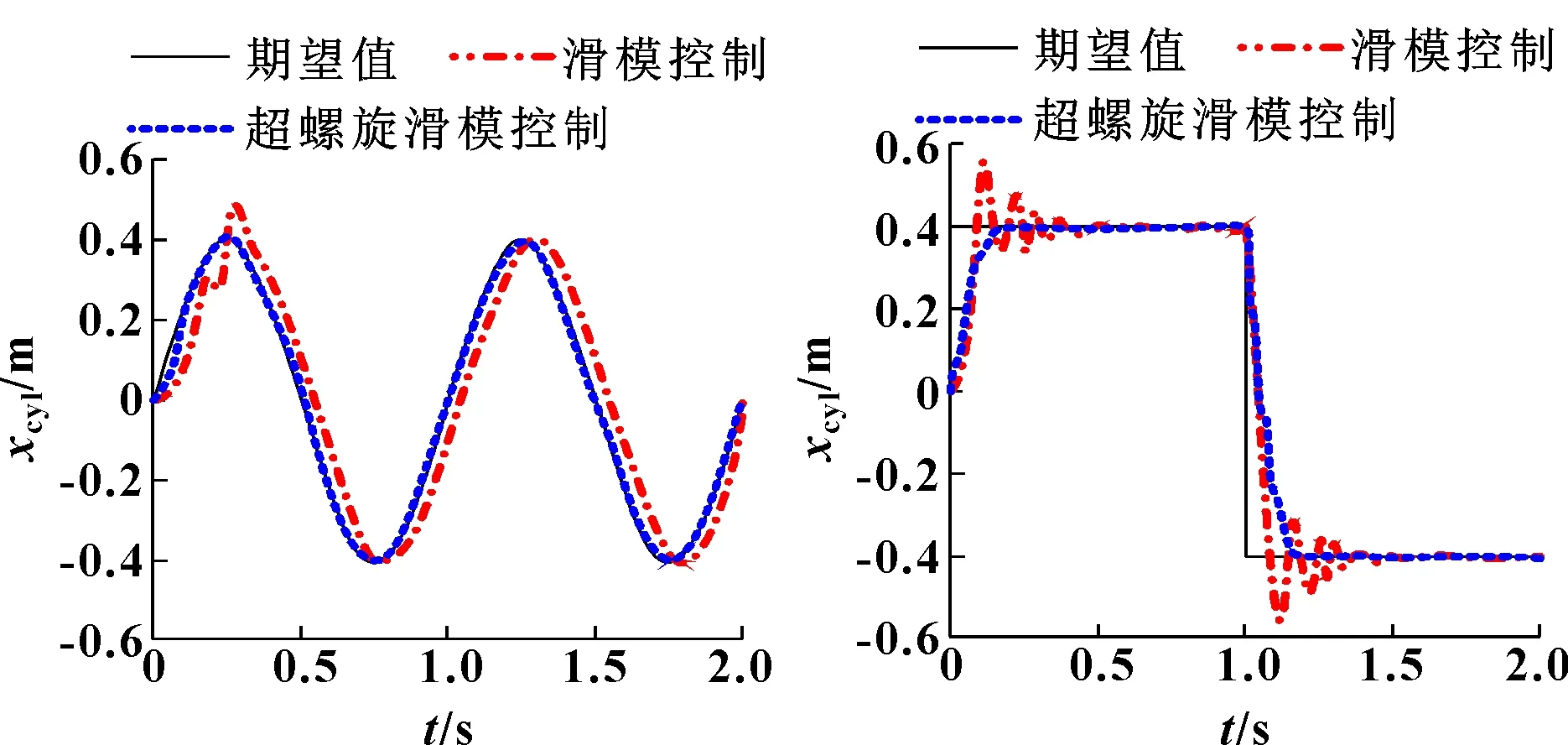
圖5 正弦波信號跟蹤(Fload=20kN) 圖6 階躍波信號跟蹤(Fload=20 kN)
由圖3可知:跟蹤信號為正弦波信號時,在空載情況下,采用滑模控制器時,液壓執(zhí)行機(jī)構(gòu)位移跟蹤在025后才達(dá)到穩(wěn)定狀態(tài);采用超螺旋滑模控制器時,液壓執(zhí)行機(jī)構(gòu)位移跟蹤在009后就達(dá)到了穩(wěn)定狀態(tài),自適應(yīng)調(diào)節(jié)時間縮短了64。兩種控制器在穩(wěn)定前都有偏離,差別不大,但是穩(wěn)定后運動位移與期望值偏差都較小。由圖4可知:跟蹤信號為階躍波時,在空載情況下,采用滑模控制器時,液壓執(zhí)行機(jī)構(gòu)位移跟蹤在041后才達(dá)到穩(wěn)定狀態(tài);采用超螺旋滑模控制器時,在017后就達(dá)到了穩(wěn)定狀態(tài),自適應(yīng)調(diào)節(jié)時間縮短了585,超調(diào)量都為0,穩(wěn)定后運動位移與期望值偏差較小。由圖5可知:跟蹤信號為正弦波時,在負(fù)載為20的情況下,采用滑模控制器時,液壓執(zhí)行機(jī)構(gòu)位移跟蹤在033后才達(dá)到穩(wěn)定狀態(tài),穩(wěn)定后運動位移與期望值偏差較大;采用超螺旋滑模控制器時,在009后就達(dá)到了穩(wěn)定狀態(tài),自適應(yīng)調(diào)節(jié)時間縮短了723,穩(wěn)定后運動位移與期望值偏差較小。由圖6可知:跟蹤信號為階躍波時,在負(fù)載為20的情況下,采用滑模控制器時,液壓執(zhí)行機(jī)構(gòu)位移跟蹤在05后才達(dá)到穩(wěn)定狀態(tài),超調(diào)量為375;采用超螺旋滑模控制器時,液壓執(zhí)行機(jī)構(gòu)位移跟蹤在017后就達(dá)到了穩(wěn)定狀態(tài),超調(diào)量為0,自適應(yīng)調(diào)節(jié)時間縮短了66,穩(wěn)定后運動位移與期望值偏差較小。因此,在同等條件下,采用超螺旋滑模控制的液壓執(zhí)行機(jī)構(gòu)時,執(zhí)行機(jī)構(gòu)運動位移跟蹤精度較好,自適應(yīng)調(diào)整時間較短,控制效果較好。
4 結(jié)語
針對液壓執(zhí)行機(jī)構(gòu)運動位移精度較低的問題,設(shè)計回流能量調(diào)節(jié)的液壓系統(tǒng)。采用超螺旋滑模控制器,通過仿真驗證液壓執(zhí)行機(jī)構(gòu)位移信號跟蹤效果。主要結(jié)論如下:
(1)在負(fù)載狀態(tài)下,液壓執(zhí)行機(jī)構(gòu)采用滑模控制器時,執(zhí)行機(jī)構(gòu)運動位移與期望值偏差較大,而采用超螺旋滑模控制器時,執(zhí)行器運動位移與期望值偏差較小,控制系統(tǒng)很快能達(dá)到穩(wěn)定狀態(tài)。
(2)液壓執(zhí)行機(jī)構(gòu)運動位移跟蹤誤差與設(shè)計的位移跟蹤信號有關(guān),階躍波信號在開始階段產(chǎn)生突變,偏差較大,自適應(yīng)調(diào)節(jié)時間較長,跟蹤效果較差。
(3)采用超螺旋滑模控制器能夠降低液壓執(zhí)行機(jī)構(gòu)運動位移跟蹤誤差,在空載或負(fù)載狀態(tài)下,都能夠達(dá)到較好的液壓執(zhí)行機(jī)構(gòu)控制效果,通過仿真進(jìn)一步驗證了設(shè)計的合理性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
