一種基于改進(jìn)的混合高斯模型的運(yùn)動(dòng)目標(biāo)檢測算法
2017-03-31 20:03:05李旭健張叢靜
軟件導(dǎo)刊 2016年8期
李旭健+張叢靜


摘 要:在計(jì)算機(jī)視覺應(yīng)用中,復(fù)雜場景運(yùn)動(dòng)目標(biāo)檢測是視頻監(jiān)控、目標(biāo)追蹤的基礎(chǔ),也是智能視頻監(jiān)控領(lǐng)域的研究熱點(diǎn)之一。針對(duì)現(xiàn)有運(yùn)動(dòng)目標(biāo)檢測算法中陰影干擾和參數(shù)初始化粗糙的問題,在混合高斯背景建模的基礎(chǔ)上采用HSV顏色空間替換原有的RGB顏色模式,并提出一種結(jié)合K均值算法與EM算法的參數(shù)初始化方法。實(shí)驗(yàn)表明,該算法可以有效抑制場景中運(yùn)動(dòng)物體的陰影干擾,檢測結(jié)果更加精確,對(duì)復(fù)雜場景下的運(yùn)動(dòng)目標(biāo)有較好的檢測效果。
關(guān)鍵詞關(guān)鍵詞:混合高斯模型;目標(biāo)檢測;EM算法;HSV顏色空間
DOIDOI:10.11907/rjdk.161863
中圖分類號(hào):TP312
文獻(xiàn)標(biāo)識(shí)碼:A :1672-7800(2016)008-0010-03
0 引言
新一代智能視頻監(jiān)控技術(shù)的應(yīng)用范圍越來越廣,涉及計(jì)算機(jī)視覺、模式識(shí)別、人工智能、圖像處理等各個(gè)領(lǐng)域,其中運(yùn)動(dòng)目標(biāo)的實(shí)時(shí)檢測是一個(gè)基礎(chǔ)而又關(guān)鍵的環(huán)節(jié)[1]。目前,在固定攝像頭的監(jiān)控系統(tǒng)中,主要采用的檢測技術(shù)有光流法、幀差法和背景差法。Stauffer基于背景差法最早提出用混合高斯建模來描述漸變的動(dòng)態(tài)背景,對(duì)圖像中像素采用固定數(shù)量的高斯分布,該方法能適應(yīng)緩慢的光照變化,有較好的自適應(yīng)能力[2]。
由于RGB顏色空間對(duì)運(yùn)動(dòng)目標(biāo)的陰影識(shí)別能力很差,所以傳統(tǒng)的混合高斯算法無法有效地抑制陰影,目標(biāo)檢測效果不是很理想。而HSV空間對(duì)運(yùn)動(dòng)目標(biāo)陰影有很好的識(shí)別能力,能有效抑制陰影的干擾。因此本文采用HSV混合高斯建模替代原有的RGB顏色模式,并針對(duì)傳統(tǒng)EM算法對(duì)初始化敏感和運(yùn)行速度慢的問題,提出一種結(jié)合K均值算法與EM算法參數(shù)初始化的改進(jìn)算法。一方面降低了EM算法對(duì)初始值的依賴性;另一方面,也有效提高了收斂速度及混合高斯模型參數(shù)估計(jì)值的精度。實(shí)驗(yàn)表明該算法能有效抑制陰影干擾,對(duì)室外復(fù)雜場景下的運(yùn)動(dòng)目標(biāo)有較好的檢測效果和魯棒性。
1 基于改進(jìn)混合高斯模型的運(yùn)動(dòng)目標(biāo)檢測算法
本文算法主要分3個(gè)階段,第一階段建立背景模型,將RGB顏色模型轉(zhuǎn)化為HSV模式,采用HSV混合高斯建模;第二階段結(jié)合K均值算法與EM算法完成參數(shù)的初始化;第三階段完成運(yùn)動(dòng)目標(biāo)像素值匹配和混合高斯背景模型的更新工作。具體流程見圖1。
1.2 K均值與EM算法結(jié)合的模型參數(shù)初始化
傳統(tǒng)高斯分布利用K均值算法初始化參數(shù),該方法對(duì)噪聲和孤立點(diǎn)數(shù)據(jù)敏感,在復(fù)雜場景中的誤差較大[5]。文獻(xiàn)[6]利用最大期望(EM)算法初始化參數(shù),該算法精準(zhǔn)度較高,收斂穩(wěn)定,但運(yùn)行速度慢且對(duì)參數(shù)初始值敏感,初始化的設(shè)定會(huì)對(duì)結(jié)果產(chǎn)生很大的影響。文獻(xiàn)[7]利用K均值算法對(duì)EM算法進(jìn)行初始化,解決了計(jì)算速度慢的問題,但在選取聚類中心時(shí),隨機(jī)抽取樣本值以及采用矩估計(jì)法計(jì)算參數(shù)迭代的初始值,使得參數(shù)估計(jì)不夠準(zhǔn)確。
本文結(jié)合K均值算法與EM算法初始化模型參數(shù),利用K均值算法先給出混合數(shù)據(jù)的一個(gè)粗略分類,按照分類數(shù)據(jù)給出參數(shù)的原始估計(jì)值,作為 EM算法迭代的初始值。由于抽取的像素樣本不知道歸類于哪個(gè)分布,引入隱藏變量,計(jì)算隱藏變量的對(duì)數(shù)似然函數(shù)的期望,即每個(gè)像素屬于不同模型的概率,最后利用上步求得的最大似然值重新估計(jì)參數(shù)的值,如此反復(fù),直到收斂[9]。該算法加快了EM算法的迭代速度,而且使得初始化結(jié)果更加精確。具體步驟如下:
2 實(shí)驗(yàn)結(jié)果與分析
為檢測本文算法對(duì)運(yùn)動(dòng)目標(biāo)的有效性,對(duì)該算法進(jìn)行實(shí)驗(yàn)驗(yàn)證。實(shí)驗(yàn)計(jì)算機(jī)CPU為Pentium(R) E5300 2.80GHZ,內(nèi)存為2.00GB,仿真軟件為Matlab7.0,對(duì)算法進(jìn)行檢測時(shí),假定各像素之間相互獨(dú)立。
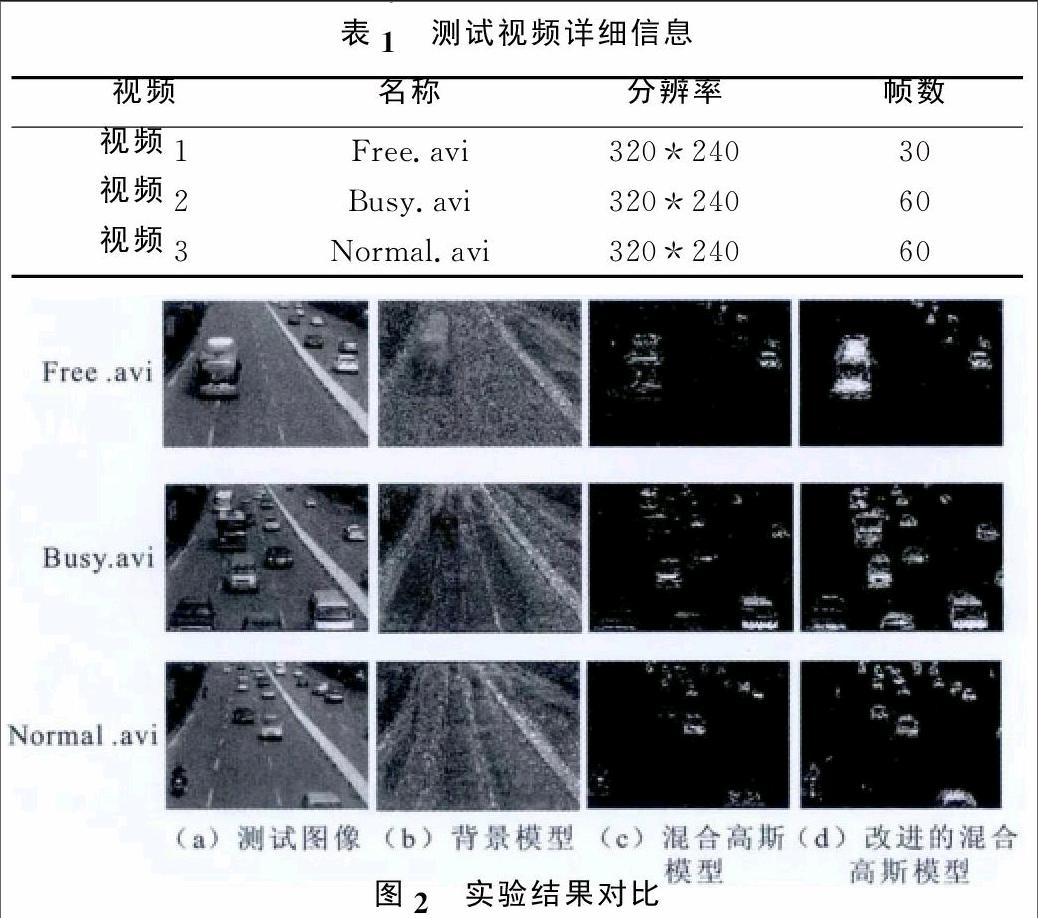
混合高斯模型的最大高斯分布的上限為5,初始權(quán)值取0.3。本次實(shí)驗(yàn)采取了3段視頻,視頻信息如表1所示,檢測效果如圖2所示。
圖2 為兩種方法在3個(gè)測試集進(jìn)行應(yīng)用的結(jié)果,分別為單獨(dú)行駛的車輛Free.avi視頻,多車輛行駛Busy.avi視頻和正常車流量檢測視頻Normal.avi。針對(duì)每一個(gè)視頻,給出了測試圖像、傳統(tǒng)混合高斯分布背景模型、傳統(tǒng)混合高斯分布的前景檢測效果和本文算法的前景檢測效果。縱向效果比對(duì),由于Free.avi視頻中道路上沒有多余的車輛,檢測較為明顯;而Busy.avi視頻中因?yàn)檐囕v較多,受相互疊加的陰影影響,檢測效果稍差;Normal.avi檢測出了主體目標(biāo),效果較好,但是存在明顯的噪聲和空洞。橫
向比對(duì),從檢測圖像(b)、(c)中可以看出,傳統(tǒng)的混合高斯模型算法能夠識(shí)別運(yùn)動(dòng)目標(biāo),但是存在明顯的陰影噪聲和大量空洞[11],目標(biāo)物體檢測不連貫,并且存在漏檢現(xiàn)象。圖像(d)為本文的檢測算法,可以看出,改進(jìn)后的混合高斯算法,抑制陰影的效果較為明顯,檢測的準(zhǔn)確性也有較大提升,不足之處在于依然存在部分空洞和噪聲,需要后續(xù)處理。
3 結(jié)語
本文提出了一種基于改進(jìn)的混合高斯模型的運(yùn)動(dòng)目標(biāo)檢測算法,采用HSV混合高斯建立背景模型,將RGB顏色模型轉(zhuǎn)化為HSV模式,結(jié)合K均值算法與EM算法完成參數(shù)初始化,最后完成運(yùn)動(dòng)目標(biāo)像素值匹配和背景模型的更新。實(shí)驗(yàn)證明,在室外正常陽光照射下,該算法可以有效抑制運(yùn)動(dòng)目標(biāo)陰影,檢測結(jié)果也更加準(zhǔn)確,具有良好的魯棒性。
參考文獻(xiàn):
[1]楊婷婷.交叉口區(qū)域多運(yùn)動(dòng)車輛跟蹤與交通事件檢測[D].合肥:中國科學(xué)技術(shù)大學(xué),2015.
[2]柯佳,詹永照,陳瀟君,等.軌跡和多標(biāo)簽超圖配對(duì)融合的視頻復(fù)雜事件檢測[J].中國圖象圖形學(xué)報(bào),2013(12):26-32.
[3]林慶,徐柱,王士同,等. HSV自適應(yīng)混合高斯模型的運(yùn)動(dòng)目標(biāo)檢測[J]. 計(jì)算機(jī)科學(xué),2010(10):254-256,290.
[4]吳文星. 基于超聲電機(jī)的視頻運(yùn)動(dòng)目標(biāo)跟蹤系統(tǒng)[D].南京:南京航空航天大學(xué),2012.
[5]LIY, LI L.A novel split and merge EM algorithm for gaussianmixture model [C].Proceedings of the 5th International Conference on Natural Computation,2009:479-483.
[6]李百惠,楊庚. 混合高斯模型的自適應(yīng)前景提取[J]. 中國圖象圖形學(xué)報(bào),2013(18):1620-1627.
[7]王軍,柳紅巖.基于三目視覺系統(tǒng)的車輛導(dǎo)引方法[J].計(jì)算機(jī)應(yīng)用.2014(6):54-57.
[8]邵奇可,周宇,李路,等.復(fù)雜場景下自適應(yīng)背景減除算法[J]. 中國圖象圖形學(xué)報(bào),201(6):756-763.
[9]李百惠,楊庚. 混合高斯模型的自適應(yīng)前景提取[J]. 中國圖象圖形學(xué)報(bào),2013(12):1620-1627.
[10]黃文麗,范勇,李繪卓,等. 改進(jìn)的混合高斯算法[J]. 計(jì)算機(jī)工程與設(shè)計(jì),2011(2):592-595.
[11]范文超,李曉宇,魏凱,等.基于改進(jìn)的高斯混合模型的運(yùn)動(dòng)目標(biāo)檢測[J]. 計(jì)算機(jī)科學(xué),2015(5):286-288,319.
[12]李鴻. 基于混合高斯模型的運(yùn)動(dòng)檢測及陰影消除算法研究[D].天津:中國民航大學(xué),2013.
(責(zé)任編輯:陳福時(shí))