一種新的無刷雙饋電機(jī)軸帶系統(tǒng)矢量控制方案*
2017-04-12 02:59:37王曉梅常國梅徐國林烏云翔邵詩逸
電機(jī)與控制應(yīng)用 2017年3期
王曉梅, 孫 健, 常國梅, 徐國林, 烏云翔, 邵詩逸
(北京賽思億電氣科技有限公司,北京 100097)
一種新的無刷雙饋電機(jī)軸帶系統(tǒng)矢量控制方案*
王曉梅, 孫 健, 常國梅, 徐國林, 烏云翔, 邵詩逸
(北京賽思億電氣科技有限公司,北京 100097)
無刷雙饋電機(jī)(BDFM)由于其無刷設(shè)計(jì)具備高可靠性,并且BDFM僅需要使用一個部分功率變頻器,可降低系統(tǒng)總成本。這些特性非常適用于速度范圍被嚴(yán)格限制的軸帶發(fā)電。提出了一種基于功率繞組磁鏈同步坐標(biāo)系的矢量控制方案,能夠?qū)崿F(xiàn)穩(wěn)定的獨(dú)網(wǎng)運(yùn)行。詳細(xì)介紹了控制的數(shù)學(xué)模型和相關(guān)推導(dǎo),并進(jìn)行了穩(wěn)態(tài)和瞬態(tài)性能的試驗(yàn)驗(yàn)證。
無刷雙饋電機(jī); 矢量控制; 軸帶系統(tǒng); 獨(dú)網(wǎng)
0 引 言
無刷雙饋電機(jī)(Brushless Doubly Fed Motor,BDFM)有兩個獨(dú)立的定子繞組,兩者之間在機(jī)械和電磁上完全獨(dú)立。一般來說,一個繞組直接與電網(wǎng)相連,稱為功率繞組(Power Winding,PW);另一個繞組與變頻器[1]相連,稱為控制繞組(Control Winding,CW)。雖然兩個三相定子繞組是繞在相同的鐵心上,但如果兩個繞組采用特殊的極對數(shù)組合,可實(shí)現(xiàn)電磁上的完全去耦合。在各種極對數(shù)組合中,4/8和2/6是應(yīng)用最廣泛的[2-3]。BDFM采用類鼠籠結(jié)構(gòu)或繞組式設(shè)計(jì)的轉(zhuǎn)子實(shí)現(xiàn)兩個定子繞組之間的間接耦合[3]。
由于BDFM的控制繞組僅吸收轉(zhuǎn)差功率,故只需使用部分功率變頻器即可[4]。變頻器的功率與電機(jī)調(diào)速范圍密切相關(guān)[5],當(dāng)轉(zhuǎn)速范圍較小時,可以大大降低變頻器的功率及相應(yīng)的成本。此外,BDFM沒有滑環(huán)和碳刷,因此具有更高的可靠性,需要更少的維護(hù)。
在設(shè)計(jì)研究上,國內(nèi)外對于BDFM的設(shè)計(jì)方法[3]、容量計(jì)算[1]、仿真方法[6]和電磁設(shè)計(jì)[7]等多方面進(jìn)行了較為成熟的研究。目前的研究重點(diǎn)已經(jīng)逐漸轉(zhuǎn)移到BDFM的應(yīng)用領(lǐng)域[8]。
在過去幾年的應(yīng)用中,BDFM被認(rèn)為是一種解決風(fēng)力發(fā)電的理想解決方案[9-10]。學(xué)術(shù)界已經(jīng)對其控制方法[11-12]、不平衡運(yùn)行[13],以及在電網(wǎng)電壓跌落時的低電壓穿越[14-15]開展了廣泛研究。近來,軸帶發(fā)電被認(rèn)為是BDFM的另一個潛在研究領(lǐng)域[16]。在軸帶發(fā)電系統(tǒng)中,主推進(jìn)柴油機(jī)驅(qū)動BDFM向船舶負(fù)載供電。采用軸帶電機(jī)的優(yōu)勢在于可以降低燃料成本、減少發(fā)電機(jī)維護(hù)費(fèi)用及潤滑費(fèi)用[17]。對于定槳矩系統(tǒng),發(fā)電機(jī)的轉(zhuǎn)速由主推進(jìn)柴油機(jī)決定,所以要求軸帶系統(tǒng)適應(yīng)轉(zhuǎn)速變化的同時能為負(fù)載提供一個輸出恒定頻率的電源[18]。
風(fēng)力發(fā)電和軸帶發(fā)電的相似之處在于兩者都處于限定的轉(zhuǎn)速范圍之內(nèi)。這樣的工作環(huán)境非常適合BDFM配備部分功率變頻器的系統(tǒng)[19]。但是,這兩個應(yīng)用之間仍然存在明顯的區(qū)別:軸帶發(fā)電系統(tǒng)能夠?qū)崿F(xiàn)獨(dú)網(wǎng)運(yùn)行,而風(fēng)力發(fā)電系統(tǒng)卻要連接一個大電網(wǎng)。在獨(dú)網(wǎng)運(yùn)行時,軸帶發(fā)電系統(tǒng)需保證負(fù)載變化時輸出電壓仍然穩(wěn)定。根據(jù)最新的報道,目前最大的容量應(yīng)用于軸帶發(fā)電的BDFM是700 kW[20]。
本文旨在提出一種基于獨(dú)網(wǎng)條件下的PW定子磁鏈定向的矢量控制方案[11]。
1 BDFM的基本原理及建模
1.1 基本操作
圖1所示為一個無刷雙饋軸帶發(fā)電系統(tǒng),PW連接網(wǎng)側(cè)逆變器端,CW連接在機(jī)側(cè)逆變器端,BDFM的速度由兩個定子繞組的頻率決定,不受扭矩影響,可表示為
(1)
式中:ωr、ω1、ω2——轉(zhuǎn)子、PW和CW的角頻率;p1、p2——PW和CW的極對數(shù)。
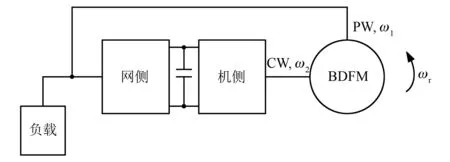
圖1 無刷雙饋軸帶發(fā)電系統(tǒng)
由于PW的角頻率ω1是恒定的50 Hz,轉(zhuǎn)子轉(zhuǎn)速ωr是由主柴油機(jī)決定的,CW的頻率必須滿足式(1)以保證BDFM保持在同步運(yùn)行模式下。
本文主要研究電機(jī)的控制策略,即機(jī)側(cè)部分,網(wǎng)側(cè)控制部分本文不做討論。
1.2 矢量控制的數(shù)學(xué)表征
BDFM在同步運(yùn)行模式下的矢量控制算式如式(2)~式(8)所示。
(2)
(3)
(4)
(5)
(6)
(7)
(8)
式中:u、i、R、L、Ψ——電壓、電流、電阻、電感和磁鏈;
下標(biāo)1、2、r——PW、CW及轉(zhuǎn)子;
上標(biāo)*——復(fù)共軛;
Te——轉(zhuǎn)矩。
從式(2)~式(8)中可以很清楚地看到PW和CW間沒有直接的磁耦,轉(zhuǎn)子是連接兩個定子繞組的介質(zhì)。
2 控制方案
2.1 電壓控制環(huán)
最終的控制目的是無論負(fù)載條件如何,均需穩(wěn)定PW的輸出電壓,即控制目標(biāo)為u1d和u1q。如果把式(2)直接投影到d軸和q軸上,可得
(9)
(10)
當(dāng)u1足夠大時,則可以忽略R1i1的下降。穩(wěn)態(tài)Ψ1是常數(shù),則dΨ1/dt≈0。因此,式(9)和式(10)可近似為
(11)
(12)
式(3)可在dq軸上分解為
(13)
(14)
綜合考慮BDFM模型,可得到ψ1和i2的關(guān)系為
(15)
(16)

σ1——PW的漏抗系數(shù)[11]。
因此-i2q控制Ψ1d,-i2d控制Ψ1q。值得注意的是,線性增益K0跟速度有關(guān),D0d和D0q非常大,可視為擾動,其影響將在后文中討論。
總而言之,控制關(guān)系如式(7)所示,并在圖2中給出了控制方案。
(17)
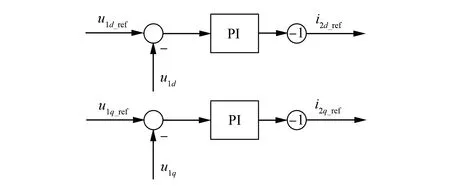
圖2 電壓控制環(huán)
2.2 電流控制環(huán)
同樣,從式(11)和式(12),i2和u2在兩個軸可以建立關(guān)系:
(18)
(19)
K1,D1d和D1q可表示為
相對于K0,D0d,D0q和K1是恒定的。同時D1d和D1q相對較小,式(18)和式(19)建立了如下控制關(guān)系:
這個關(guān)系被稱為電流控制環(huán),如圖3所示。
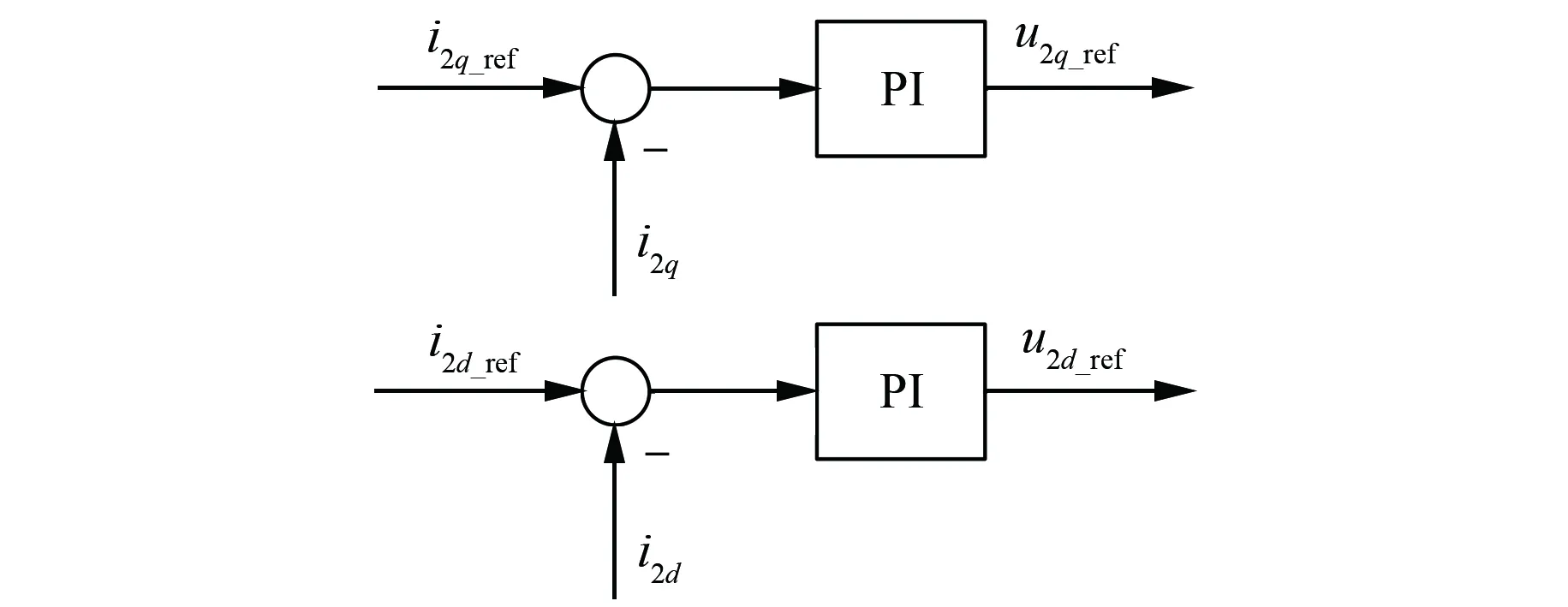
圖3 電流控制環(huán)
2.3 矢量控制方案
綜上所述,可以建立如下控制環(huán):
(20)
(21)
該控制方案示意圖如圖4所示。控制方案中,PW的控制頻率為50Hz,通過對頻率的積分得到PW磁鏈角θ1。轉(zhuǎn)子的位置信息θr由編碼器提供。為了配合PW磁鏈,如果忽略電阻下降,u1d_ref設(shè)置為0,u1q_ref根據(jù)實(shí)際所需電壓的大小來設(shè)置。
2.4 控制方案的討論
式(20)和式(21)中給出的控制鏈包括D0d,D0q,D2d和D2q的擾動部分。這些擾動來自轉(zhuǎn)子繞組與兩個定子繞組間的耦合。
這四個擾動項(xiàng)中,理論分析表明,D2d和D2q小到可以忽略不計(jì),但是D0d和D0q較大。雖然通過解耦方案可以用來補(bǔ)償擾動,但解耦補(bǔ)償將高度依賴于機(jī)器參數(shù)并且涉及復(fù)雜的計(jì)算,所以本
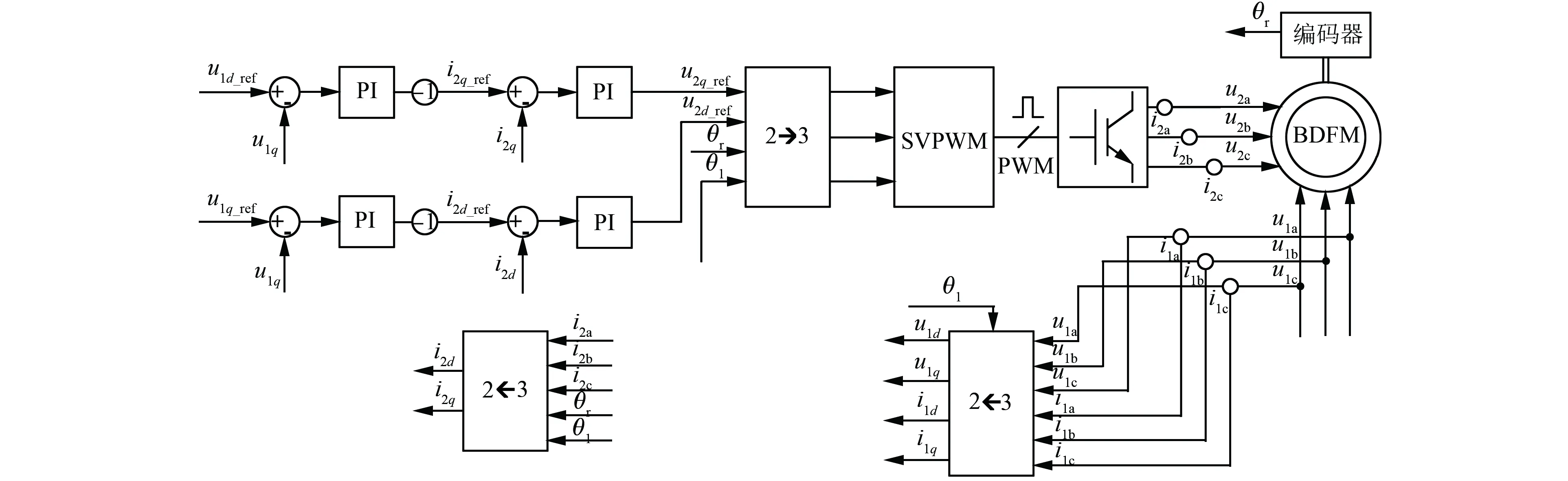
圖4 控制方案
文沒有采用這種方法,而是使用PI控制器來實(shí)現(xiàn)補(bǔ)償。這可能導(dǎo)致動態(tài)響應(yīng)能力相對較差。
此外,由于D2d和D2q相比D0d和D0q影響較小,可以看出電流環(huán)比電壓環(huán)具有更好的動態(tài)特性,并且該特性將在試驗(yàn)中得到驗(yàn)證。
3 試驗(yàn)數(shù)據(jù)
3.1 試驗(yàn)平臺的搭建
為了驗(yàn)證所提出的控制方案,建立了一個60kWBDFM的試驗(yàn)臺,用于驗(yàn)證控制性能。其參數(shù)如表1所示。
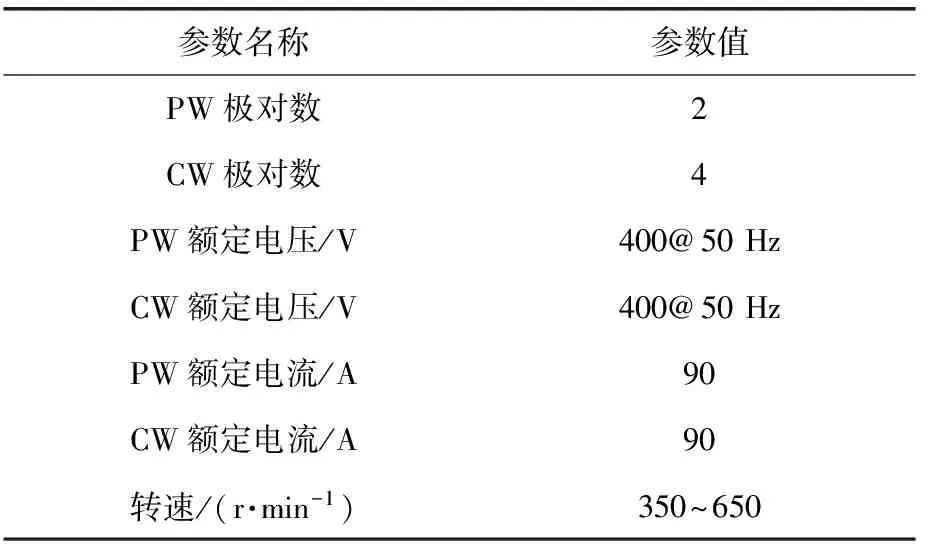
表1 BDFM參數(shù)
BDFM原理樣機(jī)連接了一個可調(diào)速的原動機(jī),模擬變化的主軸。將BDFM樣機(jī)連接到一個變頻器,該變頻器使用本方案所提出的矢量控制算法。變頻器中的網(wǎng)側(cè)和機(jī)側(cè)是完全相同的硬件,通常稱為背靠背結(jié)構(gòu)。該系統(tǒng)網(wǎng)側(cè)與傳統(tǒng)的網(wǎng)側(cè)相同,其控制目標(biāo)是與電網(wǎng)同步,維持直流母線電壓。在整個試驗(yàn)過程中,直流母線電壓保持在730 V。機(jī)側(cè)使用x86 Celeron 650 MHz CPU的控制器,滿足0.4 ms的控制回路的刷新時間。
PW通過接觸器連接到4個電阻箱,為BDFM提供負(fù)載。每個電阻箱可以提供15 kW、400 V的負(fù)載,4個電阻箱最大可提供60 kW的負(fù)載。因此,可以通過控制相應(yīng)的接觸器,實(shí)現(xiàn)15 kW的瞬態(tài)負(fù)載變化。
3.2 穩(wěn)定狀態(tài)下的控制性能
該控制要求軸帶發(fā)電系統(tǒng)提供可接受的穩(wěn)定電源,并通過PW電壓和兩個定子繞組中的電流進(jìn)行評估。
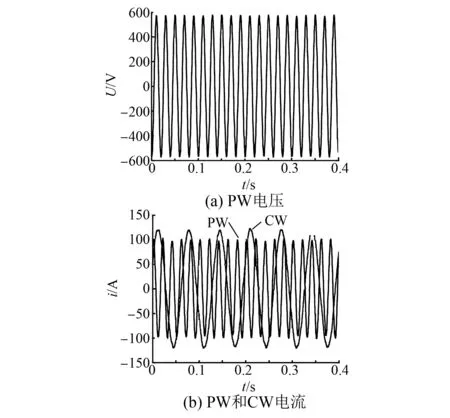
圖5 BDFM在650 r/min和60 kW時的穩(wěn)態(tài)性能
圖5給出了650 r/min和60 kW(滿載)的試驗(yàn)結(jié)果。顯然,PW和CW均能平穩(wěn)運(yùn)行,并且PW能向負(fù)載提供正弦電壓。在設(shè)計(jì)轉(zhuǎn)速范圍和不同負(fù)載條件下進(jìn)行測試。當(dāng)轉(zhuǎn)速下降到250 r/min并且無負(fù)載情況下,達(dá)到最差的總諧波失真(THD)為5.01%。因此,該矢量控制方案可以實(shí)現(xiàn)穩(wěn)定的操作,并且沒有嚴(yán)重的電壓畸變。
3.3 負(fù)載變化時的動態(tài)性能
轉(zhuǎn)速為600 r/min,負(fù)載功率為30 kW,當(dāng)15 kW的電阻箱突然被加載到PW上時,電壓波形如圖6(a)所示,其中可以觀察到約有10.7%的電壓下降,幾秒鐘后PW電壓便回到基準(zhǔn)水平。這種現(xiàn)象是由于上述所提到的擾動所致。圖6(b)提供的電流環(huán)波形中,當(dāng)負(fù)荷突然增大,i2d可以立刻響應(yīng)并跟蹤。i2d的恢復(fù)時間為0.5 s。i2q也有相似的性能,這里沒有給出。如圖6(c)所示,直流母線電壓也有一個短暫的電壓突降。
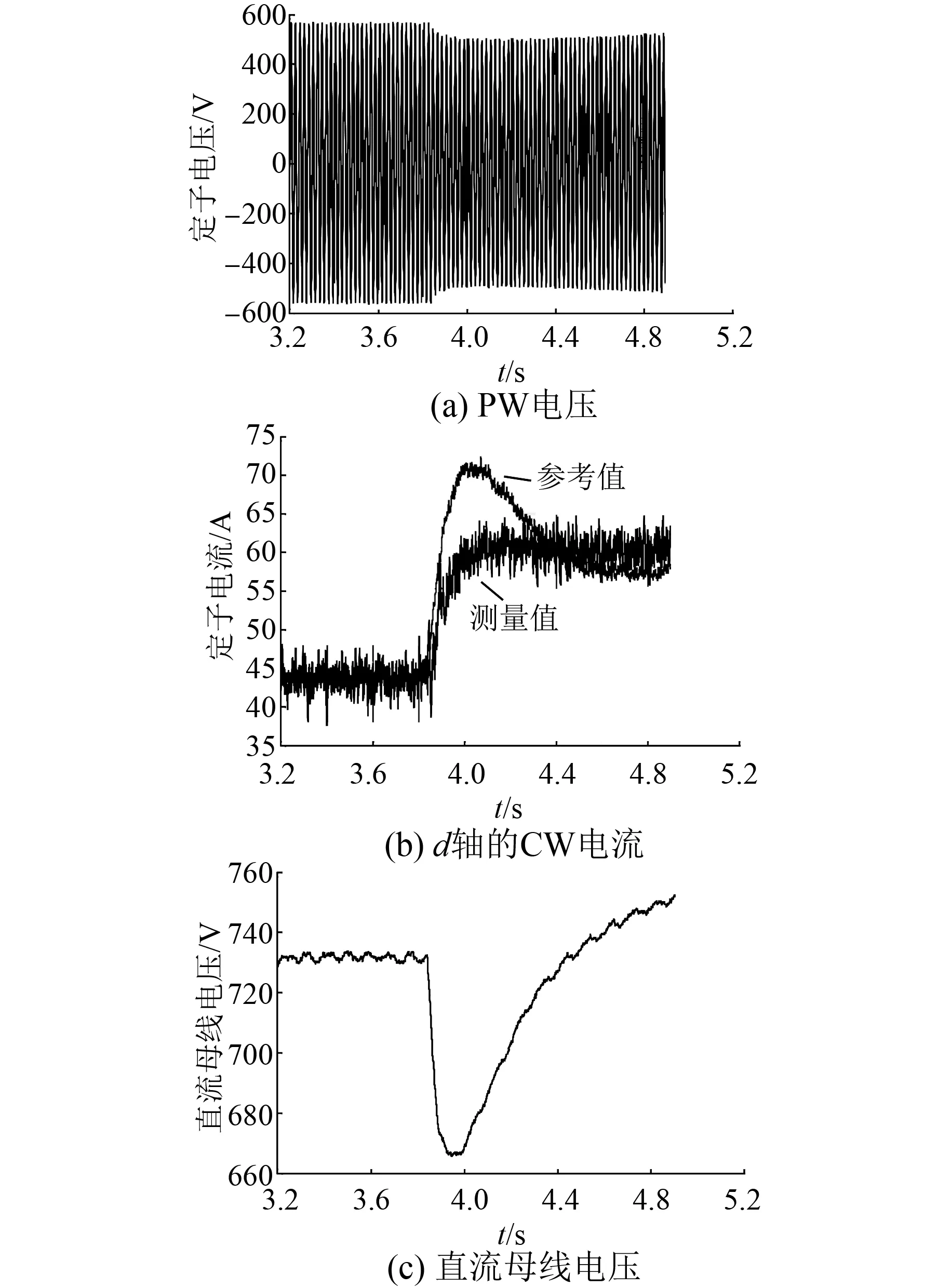
圖6 BDFM運(yùn)行在600 r/min,負(fù)載從30 kW上升到45 kW時的動態(tài)性能
當(dāng)BDFM在350 r/min,從30 kW卸載到15 kW時,數(shù)據(jù)結(jié)果如圖7所示。
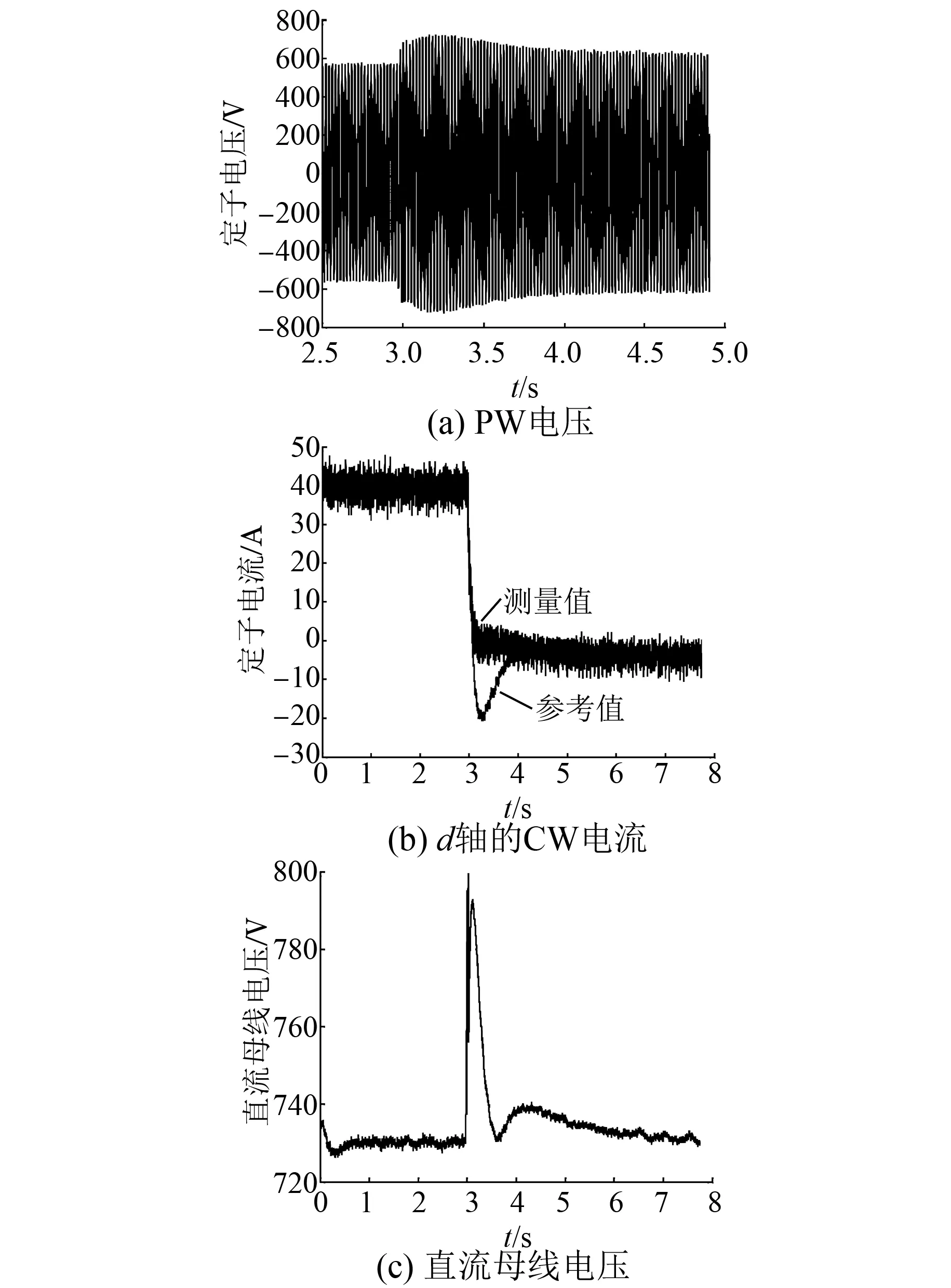
圖7 BDFM運(yùn)行在350 r/min,負(fù)載從30 kW下降到15 kW時的動態(tài)性能
相比于第一種情況,如圖7(a)所示的PW電壓,經(jīng)歷1.5 s的瞬態(tài)響應(yīng)時間,電壓上升了28.6%。圖7(b)顯示了電流環(huán)的控制性能響應(yīng)時間小于1 s。在圖7(c),直流母線電壓從730 V上升至800 V,甚至激活動態(tài)制動電路將額外的能量消耗在制動電阻上,以保護(hù)變流器的IGBT。在這兩個測試中,不難發(fā)現(xiàn)電流環(huán)控制的動態(tài)響應(yīng)效果優(yōu)于電壓環(huán)控制。這是因?yàn)殡妷涵h(huán)控制存在更大的擾動。
3.4 速度變化時的動態(tài)性能
在船舶操作過程中,軸速度可能會急劇變化。但在這種情況下,仍需保持軸帶發(fā)電系統(tǒng)的正常運(yùn)行。因此,本文對軸帶電機(jī)系統(tǒng)的動態(tài)性能進(jìn)行了試驗(yàn)研究。
圖8(a)所示為感應(yīng)電動機(jī)的速度在12 s內(nèi)從450 r/min 調(diào)整到680 r/min。在此期間,負(fù)載保持在45 kW。PW的電壓波形如圖8(b)所示,最大時增加12.5%,但最后又回到參考值。i2q成功追蹤到它的參考值。當(dāng)負(fù)載恒定時,隨著轉(zhuǎn)速的增加,由于功率下降,總電流是下降的,如圖8(c)所示。直流母線的電壓波動為3.4%,如圖8(d)所示。
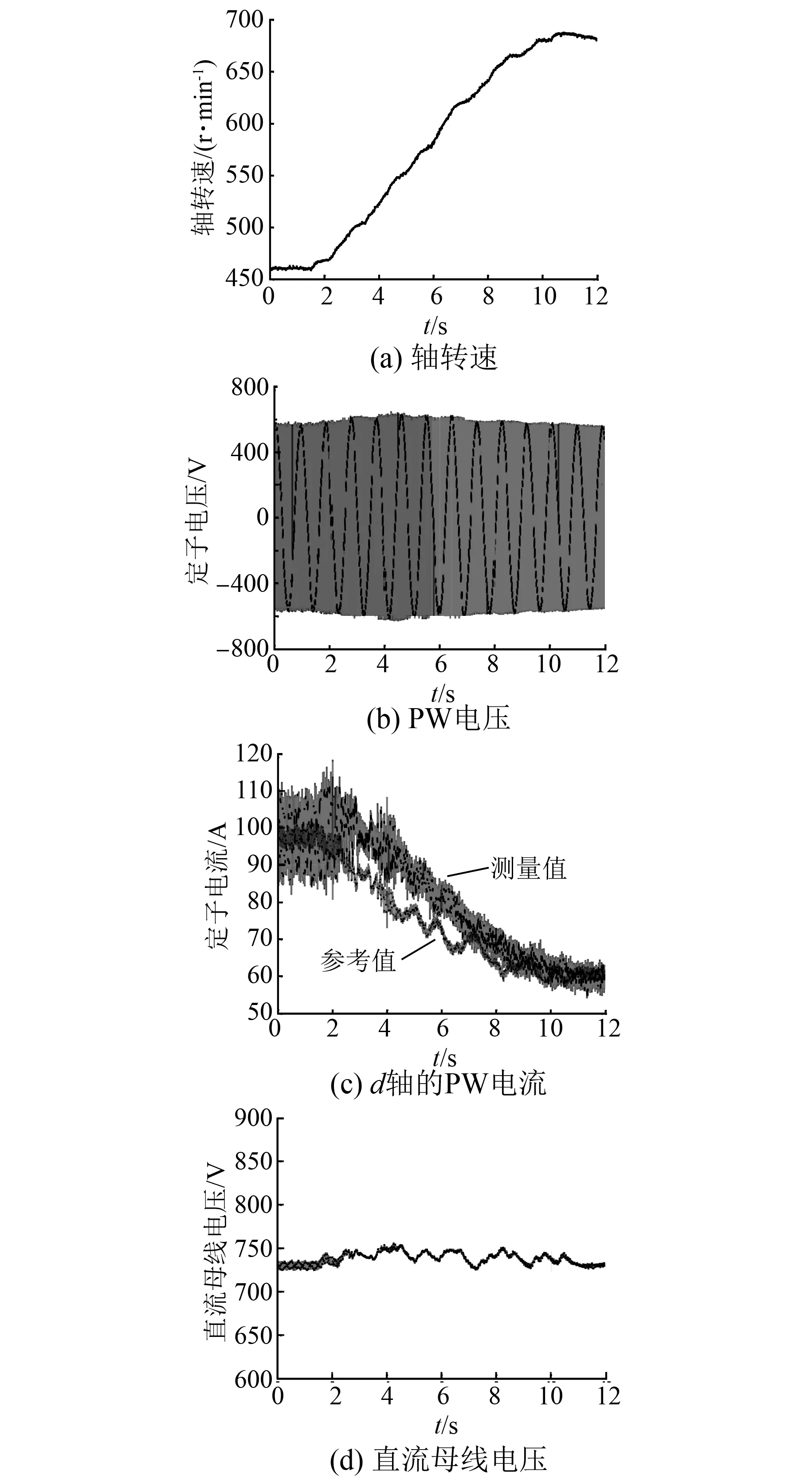
圖8 BDFM運(yùn)行在45 kW,轉(zhuǎn)速從450 r/min上升到680 r/min時的動態(tài)性能
4 結(jié) 語
本文提出了以獨(dú)立軸帶系統(tǒng)為目的的矢量控制器。該控制器基于功率繞組磁鏈,文中做了理論分析,并且通過穩(wěn)態(tài)和動態(tài)試驗(yàn)驗(yàn)證了該控制方案。結(jié)果表明,這種控制結(jié)構(gòu)能夠達(dá)到預(yù)期的性能,但是由于擾動的存在,響應(yīng)速度會有延遲,所以提高該控制器的動態(tài)響應(yīng)能力是未來的研究方向。
[1] MCMAHON R A, ROBERTS P C, WANG X, et al.Performance of BDFM as generator and motor[J].IEE Proceedings Electrical Power Applications, 2006, 153(2): 289-299.
[2] ZHOU D, SPEE R.Synchronous frame model and decoupled control development for doubly-fed machines[C]∥ Power Electronics Specialists Conference PESC 94 Record, 25th Annual IEEE,1994: 1229-1236.
[3] WAND X, MCMAHON R A, TAVNER P J.Design of the brushless doubly-fed (induction) machine[C]∥ Electric Machines & Drives Conference, IEEE, 2007: 1508-1513.
[4] 葛啟楨.船用軸帶無刷雙饋發(fā)電系統(tǒng)的實(shí)用控制技術(shù)研究[D].北京: 中國艦船研究院,2015.
[5] WANG X, ROBERTS P C, MCMAHON R A.Studies of inverter ratings of BDFM adjustable speed drive or generator systems[J].Power Electronics and Drives Systems IEEE, 2006: 337-342.
[6] 賈磊,王雪帆,熊飛.700 kW船用軸帶無刷雙饋發(fā)電機(jī)的設(shè)計(jì)與測試[J].電工技術(shù)學(xué)報,2016,31(15): 32-42.
[7] 熊飛.繞線轉(zhuǎn)子無刷雙饋電機(jī)建模分析和電磁設(shè)計(jì)研究[D].武漢: 華中科技大學(xué),2010.
[8] 陶忠良,趙文卓.無刷雙饋電機(jī)(BDFM)工業(yè)領(lǐng)域應(yīng)用研究[J].科技資訊,2014(34): 55.
[9] MCMAHON R A, WANG X, ABDI E, et al.The BDFM as a generator in wind turbines[C]∥ Power Electronics and Motion Control Conference 12th International, 2006: 1859-1865.
[10] LOGAN T G, WARRINGTON J, SHAO S, et al.Practical deployment of the brushless doubly-fed machine in a medium scale wind turbine[C]∥ International Conference on Power Electronics and Drive Systems, 2009, 56(10): 470-475.
[11] SHAO S, ABDI E, BARATI F, et al.Stator-flux oriented vector control for brushless doubly fed induction generator[J].IEEE Transactions on Industrial Electronics, 2009, 56(10): 4220-4228.
[12] 黃守道,王耀南,王毅,等.無刷雙饋電機(jī)有功和無功功率控制研究[J].中國電機(jī)工程學(xué)報,2005,25(4): 87-93.
[13] SHAO S, LONG T, ABDI E, et al.Dynamic control of the brushless doubly fed induction generator under unbalanced operation[J].IEEE Transactions on Industrial Electronics, 2013, 60(6): 2465-2476.
[14] LONG T, SHAO S, MALLIBAND P, et al.Crowbarless fault ride-through of the brushless doubly fed induction generator in a wind turbine under symmetrical voltage dips[J].IEEE Transactions on Industrial Electronics, 2013, 60(7): 2833-2841.
[15] LONG L, SHAO S, ABDI E, et al.Asymmetrical low-voltage ride through of bush less doubly fed induction generators for the wind power generation[J].IEEE Transactions on Energy Conversion, 2013, 28(3): 502-511.
[16] XIONG F, WANG X.Design and performance analysis of a brushless doubly-fed machine for stand-alone ship shaft generator systems[C]∥ International Conference on Electrical and Control Engineering, 2011: 2114-2117.
[17] 李恒玖.船用無刷雙饋軸帶發(fā)電系統(tǒng)控制研究[D].大連: 大連海事大學(xué),2015.
[18] LIU Y, XUE S.Control strategy of the shaft-driven generator based on the PWM converters[C]∥ International Conference on Methods and Models in Automation and Robotics, 2011: 178-181.
[19] 許順隆,陳景鋒,吳德烽.基于無刷雙饋發(fā)電機(jī)的船舶新型軸帶發(fā)電系統(tǒng)[J].中國航海,2013,36(4): 64-67.
[20] 陳赟.無刷雙饋電機(jī)特性仿真研究[D].武漢: 華中科技大學(xué),2013.
A New Vector Control Scheme for Brushless Doubly Fed Motor in Shaft Generation*
WANGXiaomei,SUNJian,CHANGGuomei,XUGuolin,WUYunxiang,SHAOShiyi
(Beijing CSE Electric Technology Co., Ltd., Beijing 100097, China)
Brushless doubly fed induction motor (BDFM) offered the merit of high reliability due to its brushless operation.Furthermore, when the BDFM was supplied with a fractionally-rated converter, the total system cost decreases.These characteristics were suitable in the application of shaft generation in which the speed range was strictly limited.A vector control scheme oriented on the power winding flux reference frame to achieve stable stand-alone operation was proposed.Detailed mathematical model was introduced before the control structure was explained.Experimental results on steady state and transient performance were carried out to verify the control scheme.
brushless doubly fed motor (BDFM); vector control; shaft generation; stand-alone
國家科技支撐計(jì)劃課題資助項(xiàng)目(2014BAG04B02)
王曉梅(1988—),女,研究方向?yàn)殡姎饪刂葡到y(tǒng)、電氣傳動、軸帶發(fā)電。 孫 健(1989—),男,助理工程師,研究方向?yàn)殡姎饪刂葡到y(tǒng)、電氣傳動、軸帶發(fā)電。 常國梅(1982—),女,碩士研究生,工程師,研究方向?yàn)殡姎饪刂葡到y(tǒng)、電氣傳動、軸帶發(fā)電。
TM 301.2
A
1673-6540(2017)03- 0011- 06
2016 -10 -21
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(jī)(2020年3期)2020-11-06 09:07:42
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
測控技術(shù)(2018年5期)2018-12-09 09:04:50
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
自動化博覽(2014年12期)2014-02-28 22:34:39
