基于擾動(dòng)觀測(cè)器與最小二乘法慣量辨識(shí)的永磁同步電機(jī)控制
2017-04-12 02:59:45丁遠(yuǎn)揚(yáng)
電機(jī)與控制應(yīng)用 2017年3期
關(guān)鍵詞:系統(tǒng)
丁遠(yuǎn)揚(yáng), 孫 鑫
(上海大學(xué) 機(jī)電工程與自動(dòng)化學(xué)院,上海 200072)
基于擾動(dòng)觀測(cè)器與最小二乘法慣量辨識(shí)的永磁同步電機(jī)控制
丁遠(yuǎn)揚(yáng), 孫 鑫
(上海大學(xué) 機(jī)電工程與自動(dòng)化學(xué)院,上海 200072)
將擾動(dòng)觀測(cè)器(DOB)用于永磁同步電機(jī)(PMSM)的控制能夠有效抑制外部力矩?cái)_動(dòng),但由于PMSM參數(shù)存在時(shí)變和不確定性,導(dǎo)致DOB的控制品質(zhì)下降。提出采用遞推加權(quán)最小二乘法對(duì)變化后的轉(zhuǎn)動(dòng)慣量進(jìn)行辨識(shí),將修正后的轉(zhuǎn)動(dòng)慣量用于DOB。仿真試驗(yàn)表明,該方法能夠高精度地對(duì)轉(zhuǎn)動(dòng)慣量進(jìn)行實(shí)時(shí)在線辨識(shí),提高了電機(jī)在變負(fù)載情況下的抗外部力矩?cái)_動(dòng)的能力。
永磁同步電機(jī); 擾動(dòng)觀測(cè)器; 最小二乘; 慣量辨識(shí)
0 引 言
現(xiàn)今各行各業(yè)對(duì)伺服電機(jī)的控制精度提出了越來越高的要求,以用于數(shù)控機(jī)床、機(jī)器人等的高品質(zhì)控制。影響伺服控制系統(tǒng)控制品質(zhì)的擾動(dòng)主要有兩種:設(shè)定值擾動(dòng)與外部擾動(dòng)。伺服控制系統(tǒng)的控制器通常主要用于解決設(shè)定值擾動(dòng),最終使得系統(tǒng)輸出能夠又快又準(zhǔn)地跟隨設(shè)定值的變化;但實(shí)際系統(tǒng)中,負(fù)載突變、靜摩擦及庫倫摩擦干擾等外部擾動(dòng),往往不可避免,通常是利用反饋環(huán)節(jié)與前饋控制對(duì)其進(jìn)行有限的抑制。文獻(xiàn)[1-2]利用魯棒控制使得系統(tǒng)在外部擾動(dòng)的作用下保持穩(wěn)定,但一般魯棒控制系統(tǒng)并不工作在最優(yōu)狀態(tài),是以犧牲系統(tǒng)的性能來確保系統(tǒng)穩(wěn)定性的。
文獻(xiàn)[1-2]都采用的是一種相對(duì)被動(dòng)的方法抑制外部擾動(dòng)。日本學(xué)者大西公平(K.Ohnishi)提出了擾動(dòng)觀測(cè)器(Disturbance Observer,DOB)的概念[3],通過一種相對(duì)主動(dòng)的方法對(duì)外部擾動(dòng)進(jìn)行估計(jì),并將估計(jì)值實(shí)時(shí)補(bǔ)償?shù)较到y(tǒng)以抵消外部擾動(dòng)。該方法因其簡單有效而得到了許多學(xué)者的關(guān)注,如文獻(xiàn)[4]提出了基于H∞范數(shù)優(yōu)化的DOB Q濾波器設(shè)計(jì),文獻(xiàn)[5]證明了最小相位是DOB穩(wěn)定的必要條件,文獻(xiàn)[6]提出了適用于PID控制下的非最小相位對(duì)象的DOB結(jié)構(gòu)。
DOB利用控制量、被控量與被控對(duì)象的標(biāo)稱模型來對(duì)外部擾動(dòng)進(jìn)行估計(jì),因此被控對(duì)象標(biāo)稱模型的精確度將極大地影響DOB的補(bǔ)償精度。在交流電機(jī)實(shí)際應(yīng)用中,負(fù)載轉(zhuǎn)矩突變或者機(jī)械參數(shù)(主要指轉(zhuǎn)動(dòng)慣量)變化會(huì)對(duì)系統(tǒng)期望的性能造成明顯的不良影響。針對(duì)上述問題,如果能夠通過系統(tǒng)辨識(shí)方法得到精度更高的被控對(duì)象模型或者部分模型,獲得更加接近于實(shí)際對(duì)象的模型,將提高DOB估計(jì)擾動(dòng)的能力,能夠使得系統(tǒng)的控制性能更加突出。文獻(xiàn)[7]利用朗道離散遞推算法辨識(shí)伺服系統(tǒng)中轉(zhuǎn)動(dòng)慣量,但是該算法只能用于開環(huán)系統(tǒng)的辨識(shí),無法進(jìn)行高精度的在線實(shí)時(shí)慣量辨識(shí)。
本文提出一種基于遞推加權(quán)最小二乘法(Recursive Least Square,RLS)的慣量辨識(shí)與DOB相結(jié)合的伺服控制方法。該方法使用RLS進(jìn)行在線實(shí)時(shí)慣量辨識(shí),并將辨識(shí)所得慣量參數(shù)用于DOB。通過仿真計(jì)算,驗(yàn)證了所提方法能夠提高系統(tǒng)的標(biāo)稱模型精度,以及DOB對(duì)外部擾動(dòng)估計(jì)的精度,從而提高了系統(tǒng)的抗外部擾動(dòng)的性能。
1 永磁同步電機(jī)數(shù)學(xué)模型
文獻(xiàn)[8]給出了面貼式永磁同步電機(jī)(Permanent Magnet Synchronous Motor,PMSM)調(diào)速系統(tǒng)框圖,如圖1所示。該系統(tǒng)采用SVPWM方式進(jìn)行控制。采用id=0控制,Ld=Lq=L,則dq同步旋轉(zhuǎn)坐標(biāo)系下的PMSM解耦模型為
(1)
(2)
式中:R、L——定子繞組電阻與電感;
J——轉(zhuǎn)動(dòng)慣量;
B——摩擦因數(shù)。
考慮時(shí)延與死區(qū)的SVPWM電壓源逆變器傳遞函數(shù)為
(3)
式中:Ts——逆變器的控制周期;
Td——延遲時(shí)間。
圖1中Ke為反電動(dòng)勢(shì)常數(shù),Kt為轉(zhuǎn)矩常數(shù),TL為負(fù)載轉(zhuǎn)矩。
速度環(huán)中的主控制器采用PI控制:
(4)
電流環(huán)中的副控制器也采用PI控制:
(5)
式中:kp1、kp2——比例增益系數(shù);
ki1、ki2——積分增益系數(shù)。
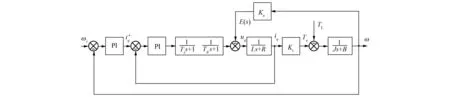
圖1 PMSM的SVPWM控制框圖
2 DOB的設(shè)計(jì)
2.1 DOB原理
PMSM調(diào)速系統(tǒng)一般包括兩個(gè)閉環(huán):電流環(huán)(內(nèi)環(huán))和速度環(huán)(外環(huán))。速度環(huán)的輸出量對(duì)調(diào)速系統(tǒng)極為重要,一般對(duì)速度環(huán)的要求是跟蹤給定速度的過渡時(shí)間短、超調(diào)量小,穩(wěn)態(tài)后速度波動(dòng)小、跟蹤精度高;在外部環(huán)境改變或系統(tǒng)突加負(fù)載的情況下,速度降落少,恢復(fù)時(shí)間短。此外,由于對(duì)電機(jī)輸出速度有重要影響的力矩?cái)_動(dòng)在電流環(huán)外面,所以電流環(huán)控制器對(duì)其沒有直接的補(bǔ)償作用。基于上述考慮,將DOB用于速度環(huán)控制,以提高抗轉(zhuǎn)矩?cái)_動(dòng)的能力。

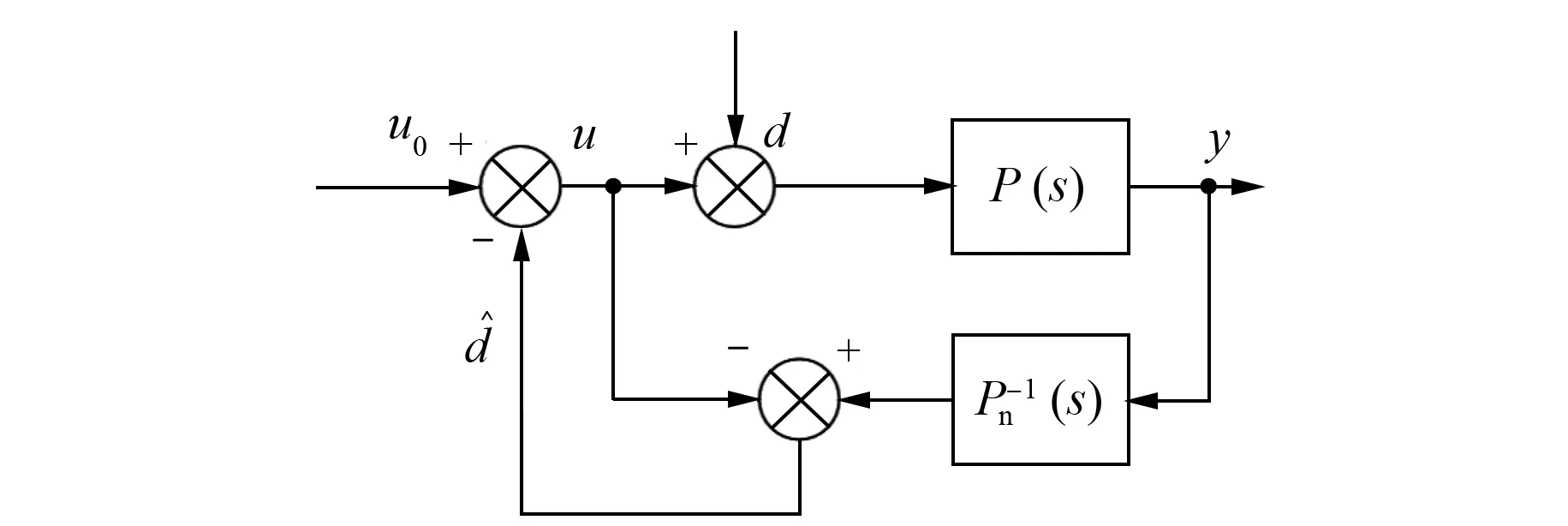
圖2 DOB原理圖

2.2 調(diào)速系統(tǒng)DOB設(shè)計(jì)
在PMSM調(diào)速系統(tǒng)中,負(fù)載轉(zhuǎn)矩TL為主要外部擾動(dòng),因此設(shè)計(jì)DOB對(duì)其進(jìn)行觀測(cè)并進(jìn)行補(bǔ)償。基于DOB的PMSM控制框圖如圖4所示。
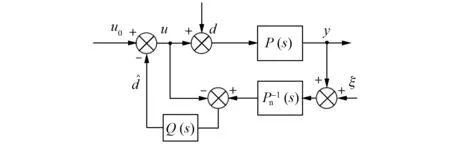
圖3 改進(jìn)的DOB結(jié)構(gòu)圖
由于逆變器的控制周期Ts與延遲時(shí)間Td均十分小,可將電流環(huán)簡化等效為1。若忽略反電動(dòng)勢(shì)常數(shù)Ke,則可將基于DOB的PMSM SVPWM控制框圖簡化為圖5所示。對(duì)圖5進(jìn)行方框圖變換后得到圖6,圖6將轉(zhuǎn)矩?cái)_動(dòng)TL變?yōu)榈刃щ娏鲾_動(dòng)iL,可得到等效擾動(dòng)觀測(cè)值為
(6)
其中:
(7)
(8)
低通濾波器Q(s)采用一階低通的形式,時(shí)間常數(shù)τ取采樣周期Ts的10倍[7]。
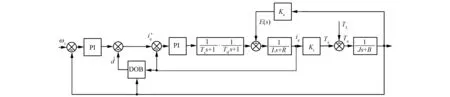
圖4 基于DOB的PMSM SVPWM控制框圖

圖5 簡化的基于DOB的PMSM SVPWM控制框圖
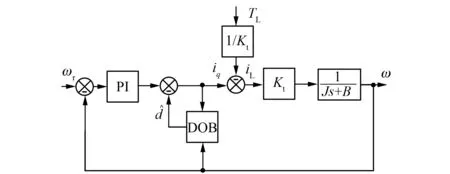
圖6 經(jīng)變換的基于DOB的PMSM SVPWM控制框圖
3 DOB參數(shù)辨識(shí)
由于DOB對(duì)負(fù)載擾動(dòng)TL的觀測(cè)為在線實(shí)時(shí)進(jìn)行,因此對(duì)轉(zhuǎn)動(dòng)慣量的辨識(shí)也必須是在線實(shí)時(shí)進(jìn)行。本文運(yùn)用RLS對(duì)系統(tǒng)參數(shù)進(jìn)行在線估計(jì),該方法具有計(jì)算量小、辨識(shí)精度高等特點(diǎn)。
RLS的遞推算法為
(9)
(10)
(11)
式中:λ——遺忘因子;
z(m+1)——當(dāng)前時(shí)刻的測(cè)量值;
h(m+1)——對(duì)象輸入輸出量的歷史信息;


Km+1——增益修正矩陣。
基于RLS與DOB的PMSM SVPWM控制框圖如圖7所示。遞推加權(quán)最小二乘模塊以電流環(huán)的反饋值iq與轉(zhuǎn)速反饋值ω作為輸入信號(hào)來對(duì)轉(zhuǎn)動(dòng)慣量J進(jìn)行辨識(shí)。
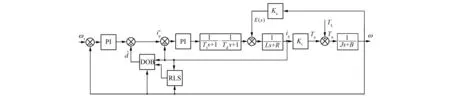
圖7 基于RLS與DOB的PMSM SVPWM控制框圖
待辨識(shí)對(duì)象模型為
(12)
對(duì)Pn(s)進(jìn)行Z變換后得到對(duì)象模型的離散形式:
(13)
(14)
歷史信息矩陣h(m+1),由m時(shí)刻的電流環(huán)的反饋值iq與轉(zhuǎn)速反饋值ω組成。
(15)
4 仿真分析
4.1 系統(tǒng)描述
圖7中PMSM控制框圖的參數(shù)取值如表1所示。
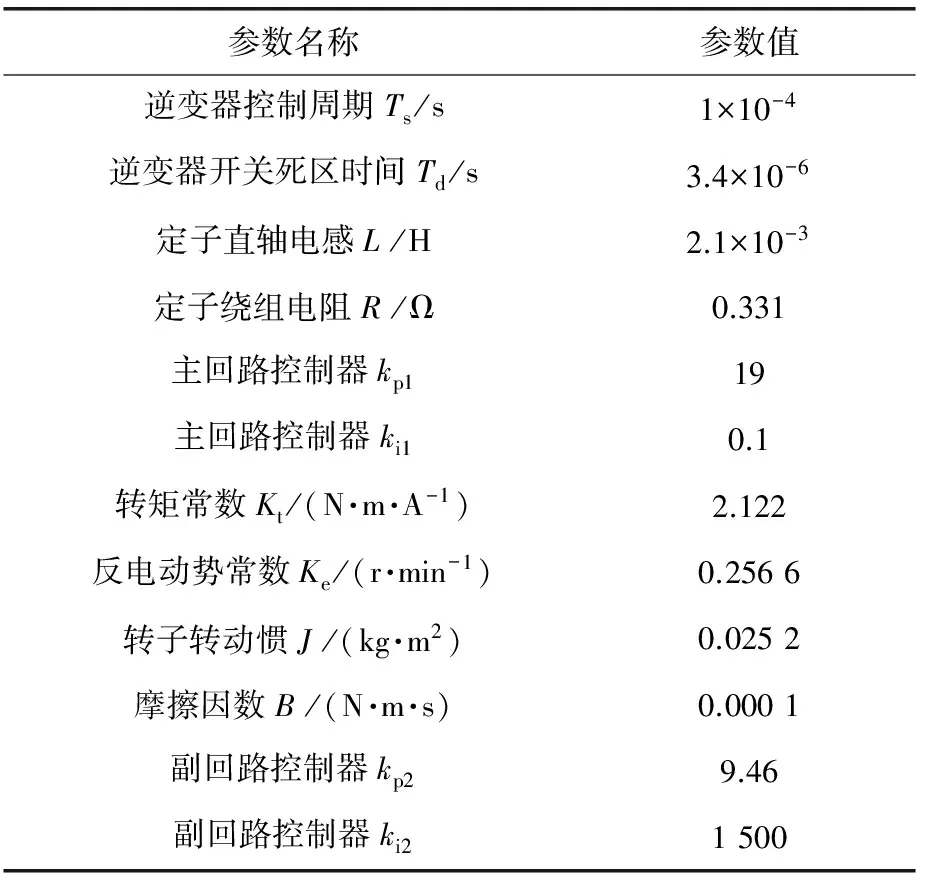
表1 PMSM控制系統(tǒng)參數(shù)表
DOB的輸出值為
(16)
若式(16)中的轉(zhuǎn)動(dòng)慣量J與摩擦因數(shù)B無法測(cè)得,則取電機(jī)空載時(shí)的標(biāo)稱值作為DOB的參數(shù),此時(shí)得到擾動(dòng)觀測(cè)值為
(17)
4.2 結(jié)果分析
對(duì)PMSM系統(tǒng)采取雙環(huán)PI控制,在不包含DOB與包含DOB的兩種情況下施加外部力矩,進(jìn)行抗擾動(dòng)試驗(yàn)。在500 r/min的轉(zhuǎn)速下突加75 N·m外部力矩,轉(zhuǎn)速響應(yīng)曲線如圖8所示。點(diǎn)狀線為不包含DOB的速度響應(yīng)曲線,在施加外部力矩后,轉(zhuǎn)速下降至498.2 r/min,并無法回升至500 r/min的轉(zhuǎn)速設(shè)定值,轉(zhuǎn)速控制有余差。圖8中虛線為包含DOB的轉(zhuǎn)速控制系統(tǒng),在施加外部力矩后,轉(zhuǎn)速下降至498.75 r/min,經(jīng)過0.005 s后回升并穩(wěn)定在設(shè)定值500 r/min。PMSM轉(zhuǎn)速控制系統(tǒng)引入DOB能夠有效提升抗外部力矩?cái)_動(dòng)的能力。
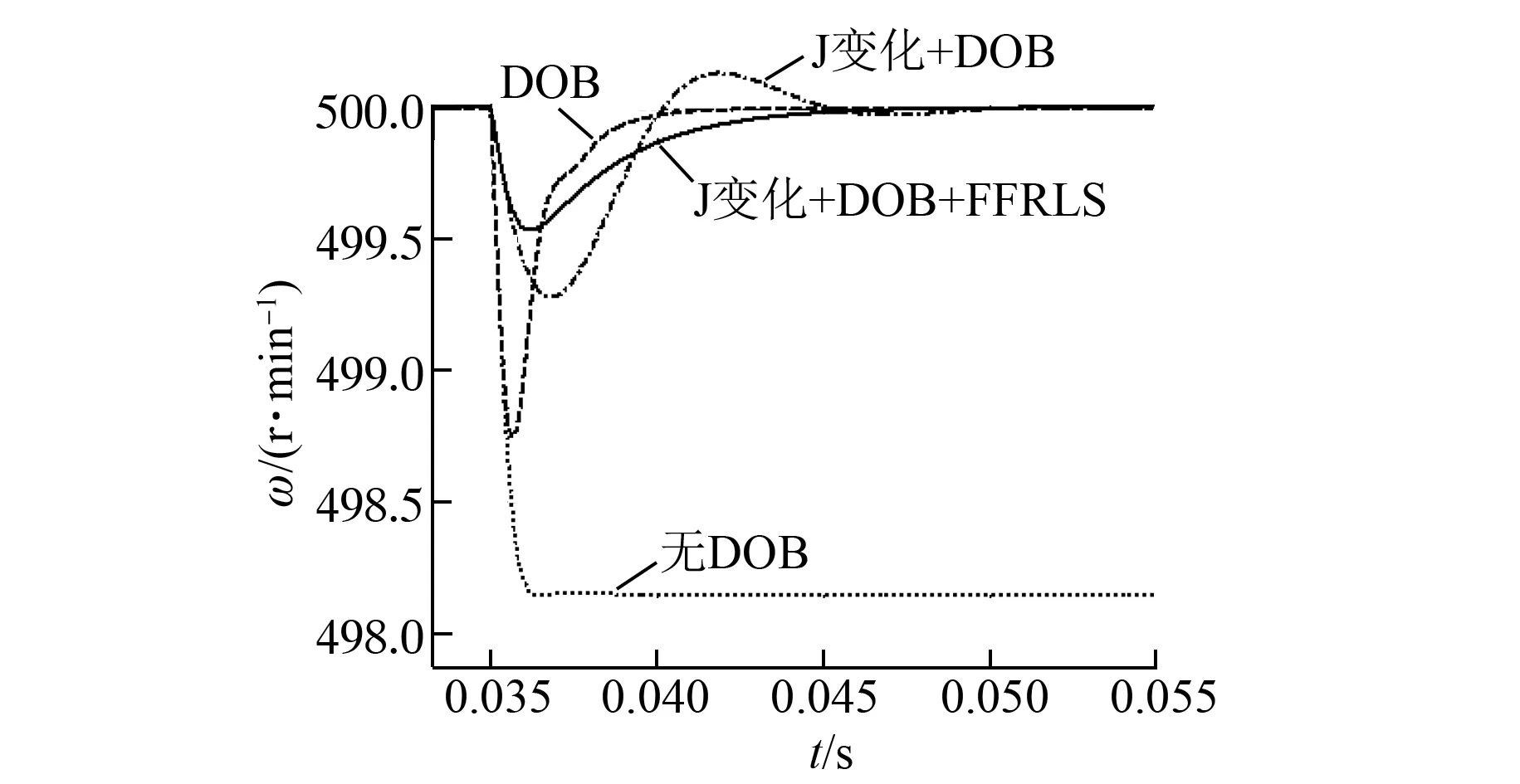
圖8 轉(zhuǎn)速控制響應(yīng)曲線圖
由式(16)可知,DOB的觀測(cè)精度取決于兩個(gè)參數(shù):轉(zhuǎn)動(dòng)慣量J和摩擦因數(shù)B。若電機(jī)不為空載,則此時(shí)實(shí)際轉(zhuǎn)動(dòng)慣量與電機(jī)的標(biāo)稱值不同,DOB的精度也會(huì)受到較大影響。電機(jī)空載時(shí)的轉(zhuǎn)動(dòng)慣量為0.025 2 kg·m2,若將實(shí)際轉(zhuǎn)動(dòng)慣量增大至0.1 kg·m2,而此時(shí)DOB的參數(shù)J仍然取0.025 2 kg·m2,在外部力矩?cái)_動(dòng)下,轉(zhuǎn)速響應(yīng)曲線如圖8點(diǎn)劃線所示。此時(shí)轉(zhuǎn)速下降至499.28 r/min,后又超速至500.14 r/min,經(jīng)過了0.011 s后才穩(wěn)定在設(shè)定值500 r/min。因此實(shí)際轉(zhuǎn)動(dòng)慣量增大后,抗外部力矩?cái)_動(dòng)所需的時(shí)間更長,且轉(zhuǎn)速波動(dòng)更大。
運(yùn)用RLS能夠有效的對(duì)轉(zhuǎn)動(dòng)慣量進(jìn)行在線辨識(shí)。當(dāng)電機(jī)實(shí)際轉(zhuǎn)動(dòng)慣量發(fā)生變化時(shí),經(jīng)過辨識(shí)的轉(zhuǎn)動(dòng)慣量將被引入到DOB的參數(shù)之中。在突加外部力矩?cái)_動(dòng)時(shí),速度響應(yīng)曲線如圖8實(shí)線所示,轉(zhuǎn)速下降至499.54 r/min,經(jīng)過0.009 s后回升并穩(wěn)定在設(shè)定值500 r/min。加入?yún)?shù)辨識(shí)的DOB具有更加好的性能,相較于無直接采用標(biāo)稱值的DOB,抗外部力矩?cái)_動(dòng)所需調(diào)整時(shí)間更短,轉(zhuǎn)速波動(dòng)更小。
采用RLS辨識(shí)轉(zhuǎn)動(dòng)慣量的過程如圖9所示。轉(zhuǎn)動(dòng)慣量的初值設(shè)為電機(jī)空載時(shí)的標(biāo)稱值,在電機(jī)從禁止升速至額定轉(zhuǎn)速的過程中,RLS模塊根據(jù)測(cè)得的q軸電流iq與當(dāng)前轉(zhuǎn)速ω,由式(9)~式(13),可在每個(gè)控制周期計(jì)算出轉(zhuǎn)動(dòng)慣量并逐步逼近實(shí)際值。如圖9所示,當(dāng)電機(jī)起動(dòng)0.009 s時(shí),RLS辨識(shí)的轉(zhuǎn)動(dòng)慣量為0.101 2 kg·m2,十分接近實(shí)際值0.1 kg·m2。
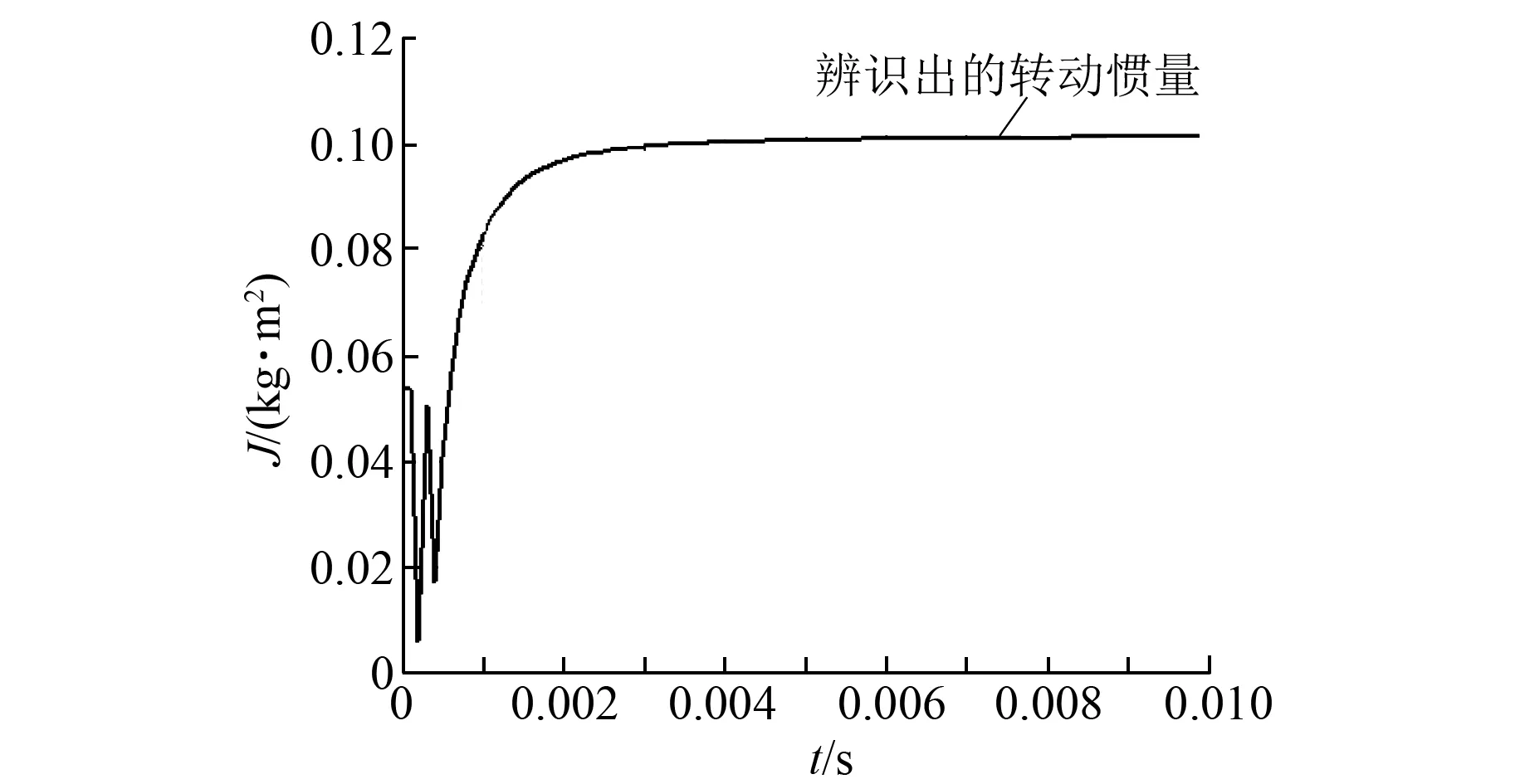
圖9 基于RLS的轉(zhuǎn)動(dòng)慣量辨識(shí)
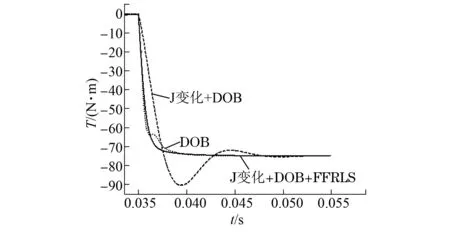
圖10 外部力矩補(bǔ)償曲線
在施加外部力矩后,RLS配合DOB進(jìn)行力矩補(bǔ)償,如圖10所示。點(diǎn)狀線為電機(jī)空載時(shí)DOB所補(bǔ)償?shù)牧兀摼€為增大轉(zhuǎn)動(dòng)慣量后DOB所補(bǔ)償?shù)牧亍S蓤D10可見,增大轉(zhuǎn)動(dòng)慣量后,力矩補(bǔ)償時(shí)的波動(dòng)更大,所需的穩(wěn)定時(shí)間更長。實(shí)線為增大轉(zhuǎn)動(dòng)慣量后采用RLS配合DOB進(jìn)行的力矩補(bǔ)償,可見對(duì)轉(zhuǎn)動(dòng)慣量進(jìn)行參數(shù)辨識(shí)后,力矩補(bǔ)償更快、更穩(wěn)定。
5 結(jié) 語
針對(duì)PMSM參數(shù)存在時(shí)變和不確定性,DOB的控制品質(zhì)下降問題,本文提出了將基于最小二乘慣量辨識(shí)的DOB用于PMSM的控制。本文對(duì)PMSM SVPWM控制框圖進(jìn)行了簡化與方框圖變換,并以此系統(tǒng)設(shè)計(jì)了DOB。在雙閉環(huán)PI調(diào)速系統(tǒng)中,DOB能有效抑制外部力矩?cái)_動(dòng)對(duì)電機(jī)轉(zhuǎn)速的影響。當(dāng)轉(zhuǎn)動(dòng)慣量出現(xiàn)變化時(shí),采用標(biāo)稱參數(shù)設(shè)計(jì)的DOB出現(xiàn)性能下降。本文對(duì)變換后的基于DOB的PMSM SVPWM系統(tǒng)進(jìn)行了參數(shù)辨識(shí),采用RLS對(duì)變化后的轉(zhuǎn)動(dòng)慣量進(jìn)行辨識(shí),將修正后的轉(zhuǎn)動(dòng)慣量用于DOB。仿真試驗(yàn)表明,該方法能夠高精度地對(duì)轉(zhuǎn)動(dòng)慣量進(jìn)行實(shí)時(shí)在線辨識(shí),具有計(jì)算量較小,能夠提高電機(jī)在變負(fù)載情況下的抗外部力矩?cái)_動(dòng)能力等優(yōu)點(diǎn)。
[1] 楊書生,鐘宜生.永磁同步電機(jī)轉(zhuǎn)速伺服系統(tǒng)魯棒控制器設(shè)計(jì)[J].中國電機(jī)工程學(xué)報(bào),2009,29(3): 84-90.
[2] YING L, CHEN Y Q, HYO A, et al.Fractional order robust control for cogging effect compensation in PMSM position servo systems: stability analysis and experiments[J].Control Engineering Practice, 2010, 18(9): 1022-1103.
[3] OHNISHI K.A new servo method in mechatronics[J].Transactions of Japanese Society of Electrical ENG, 1987(1): 83-86.
[4] SU J, WANG L, YUN J.A design of disturbance observer in standard H ∞ control framework: design of disturbance observer inframework[J].International Journal of Robust and Nonlinear CONT, 2014, 25(16): 2894-2910.
[5] HYUNGBO S H, YOUNG.State space analysis of disturbance observer and a robust stability condition[J].Decision and Control, 2007: 2193-2198.
[6] SON Y I, HYUNGBO S, JO N H, et al.Design of disturbance observer for non-minimum phase systems using PID controllers[C]∥ Proceedings of Sice Annual Conference, Vols 1-8.345 E 47TH ST, New York, NY 1001: IEEE, 2007: 196-201.
[7] 潘書娜,李世華,陳夕松.永磁同步電機(jī)調(diào)速系統(tǒng)的自適應(yīng)復(fù)合控制算法[C]∥ 2009年中國智能自動(dòng)化會(huì)議,2009: 5.
[8] 王莉娜,朱鴻悅,楊宗軍.永磁同步電動(dòng)機(jī)調(diào)速系統(tǒng)PI控制器參數(shù)整定方法[J].電工技術(shù)學(xué)報(bào),2014,29(5): 104-117.
Permanent Magnet Synchronous Motor Control Based on Disturbance Observer and Inertia Identification with Least Square
DINGYuanyang,SUNXin
(School of Mechatronic Engineering and Automation, Shanghai University, Shanghai 200072, China)
The disturbance observer for permanent magnet synchronous motor (PMSM) can effectively restrain the external torque disturbance.Since the parameters of PMSM are time-varying and uncertainty, the performance of disturbance observer declines.A recursive weighted least squares estimation was used to identify the moment of inertia after change.The corrected moment of inertia was used to the disturbance observer.The simulation results showed that this method could precisely identify the moment of inertia online.The method improved the ability of motor to restrain external torque disturbance when the load change.
permanent magnet synchronous motor (PMSM); disturbance observer (DOB); least square; inertia identification
丁遠(yuǎn)揚(yáng)(1992—),男,碩士研究生,研究方向?yàn)闄z測(cè)與控制。
TM 301.2
A
1673-6540(2017)03- 0040- 06
2016 -08 -31
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
