狹長受限空間錨節(jié)點定位的測距儀雙側(cè)自由設(shè)站法*
2017-04-13 09:18:56劉志平朱丹彤張秋昭
傳感技術(shù)學報 2017年2期
關(guān)鍵詞:方法
劉志平,朱丹彤,楊 磊,張秋昭
(中國礦業(yè)大學環(huán)境與測繪學院,江蘇徐州221116)
狹長受限空間錨節(jié)點定位的測距儀雙側(cè)自由設(shè)站法*
劉志平*,朱丹彤,楊 磊,張秋昭
(中國礦業(yè)大學環(huán)境與測繪學院,江蘇徐州221116)
針對現(xiàn)有的狹長受限空間下錨節(jié)點定位方法的不足,在大地四邊形和自由設(shè)站法基礎(chǔ)上提出了基于測距儀的中線設(shè)站法和雙側(cè)自由設(shè)站法控制網(wǎng)布設(shè)方法。多余觀測、待估坐標協(xié)因數(shù)陣等比較分析表明,所提出的測距儀雙側(cè)自由設(shè)站法為最優(yōu)布網(wǎng)方法。最后,討論了雙側(cè)自由設(shè)站法控制網(wǎng)圖形強度優(yōu)化函數(shù)及策略,并利用Leica-S910手持激光測距儀開展中國礦大室內(nèi)外定位場錨節(jié)點定位試驗,結(jié)果完全滿足錨節(jié)點定位精度要求。
錨節(jié)點定位;雙側(cè)自由設(shè)站法;手持測距儀;狹長受限空間
狹長受限空間是一種最常見的建筑結(jié)構(gòu)形式[1-3](主要有建筑走廊、交通隧道、礦井巷道等),其特點是長度尺寸遠大于寬度且為封閉或半封閉空間,該類空間范圍內(nèi)用戶位置服務(wù)是導航定位領(lǐng)域“最后一公里”的關(guān)鍵難題[4-5]。狹長受限空間的室內(nèi)定位多使用由錨節(jié)點構(gòu)成的無線傳感器網(wǎng)絡(luò)WSN(Wireless Sensor Networks),通過測量用戶到多個錨節(jié)點的距離或信號強度等信息實現(xiàn)定位[6-9]。顯然,確定錨節(jié)點的位置即錨節(jié)點定位,是進行高精度室內(nèi)定位的前提條件。目前,現(xiàn)有的錨節(jié)點定位方法主要有GPS和人工配置2種方法[10-11],其中,衛(wèi)星信號受遮擋等因素導致GPS法在狹長受限空間內(nèi)的可用性極差;人工配置法則存在較大的人工標定誤差且受限于建筑結(jié)構(gòu)圖保密要求。此外,如何在應(yīng)急條件下有效地進行無線傳感器網(wǎng)絡(luò)構(gòu)建,并快速準確地確定錨節(jié)點位置顯得尤為重要[12-14]。因此,需要探討適用于狹長受限空間的錨節(jié)點快速定位新方法。
Leica-S910手持激光測距儀別稱“掌上”全站儀,測量精度為mm級、測量范圍達200 m,其高精度便攜式特點滿足狹長受限空間的快速定位要求。一般地,錨節(jié)點多固定在狹長受限空間兩側(cè)墻體上,傳統(tǒng)三角測量或?qū)Ь€測量法架站困難,而 Leica-S910因小尺寸(61 mm×32 mm×164 mm)能夠較好地解決該難題。鑒此,首先探討現(xiàn)有的錨節(jié)點控制網(wǎng)布設(shè)方法,即大地四邊形法和中間自由設(shè)站法(高鐵無砟軌道控制網(wǎng)建立方法)[15-17],在此基礎(chǔ)上提出了改進的中間自由設(shè)站法、雙側(cè)自由設(shè)站法,進而給出了基于自由網(wǎng)平差和坐標轉(zhuǎn)換的錨節(jié)點定位方法。其次,從控制網(wǎng)多余觀測數(shù)、錨節(jié)點坐標參數(shù)協(xié)因數(shù)陣和控制網(wǎng)圖形強度優(yōu)化函數(shù)等方面對4種控制網(wǎng)方案進行比較研究。最后,利用中國礦業(yè)大學室內(nèi)外定位場實測數(shù)據(jù)進行應(yīng)用研究,結(jié)果驗證了本文所提出的雙側(cè)自由設(shè)站法為最優(yōu)布設(shè)方法。
1 狹長受限空間錨節(jié)點定位方法
1.1 錨節(jié)點控制網(wǎng)設(shè)計
1.1.1 現(xiàn)有控制網(wǎng)設(shè)計方案
顧及狹長受限空間自身特點和錨節(jié)點定位快速性要求,現(xiàn)有的能夠適用于狹長受限空間的錨節(jié)點定位控制網(wǎng)布設(shè)方法為測距儀大地四邊形法和中線自由設(shè)站法,分別記為方案1、方案2,具體布網(wǎng)形式如圖1、圖2所示。
圖1為基于測距儀大地四邊形的錨節(jié)點控制網(wǎng)。其具體要求為:直接在錨節(jié)點設(shè)站觀測,相鄰四邊形沿走向公共一條邊形成四邊網(wǎng),觀測記錄所有相鄰錨節(jié)點形成的水平邊長或平距值。若有已知的高等級點,應(yīng)進行聯(lián)測。
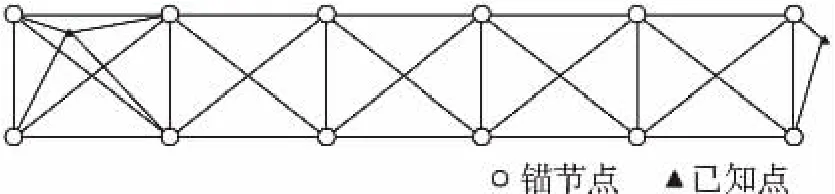
圖1 大地四邊形設(shè)站法
圖2為基于測距儀中線自由設(shè)站法的錨節(jié)點控制網(wǎng)。該控制網(wǎng)采用測距后方交會原理,不同于基于邊角交會原理的高速鐵路無砟軌道CPⅢ控制網(wǎng)[15-17]和隧道洞內(nèi)平面控制網(wǎng)[18]。具體要求為:在相鄰4個錨節(jié)點的中心位置(四邊形網(wǎng)中線位置附近)自由設(shè)置觀測站,觀測記錄觀測站至前、后視方向各三對錨節(jié)點的水平邊長或平距值,自由設(shè)置站點移動策略為向前推進兩對錨節(jié)點。此外,若有已知的高等級點,應(yīng)進行聯(lián)測。

圖2 中線自由設(shè)站法
1.1.2 控制網(wǎng)設(shè)計新方案
由于狹長受限空間內(nèi)已知高等級點一般較少或缺失,上述測距儀大地四邊形和中線自由設(shè)站法圖形強度很弱,導致上述布網(wǎng)方法難以滿足狹長受限空間下錨節(jié)點定位的精度要求。鑒此,下文提出基于改進中線自由設(shè)站法和雙側(cè)自由設(shè)站法的錨節(jié)點控制網(wǎng)方案,分別記為方案3、方案4,具體布網(wǎng)形式如圖3、圖4所示。
圖3為基于改進中線自由設(shè)站法的錨節(jié)點控制網(wǎng),該方法結(jié)合了大地四邊形和中線自由設(shè)站法,通過增加相鄰錨節(jié)點的平距觀測量,企圖提高圖形強度。
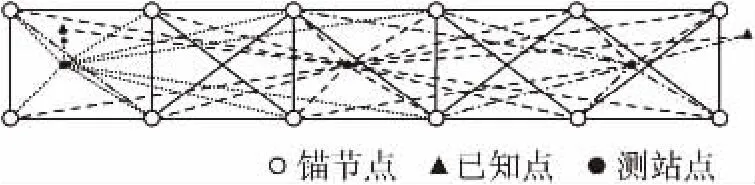
圖3 改進的中線自由設(shè)站法
圖4為基于雙側(cè)自由設(shè)站法的錨節(jié)點控制網(wǎng)。該方法與改進的中線自由設(shè)站法基本相同,區(qū)別在于圖3僅僅沿四邊形網(wǎng)中線設(shè)置觀測站,而圖4采用雙側(cè)設(shè)站方式,雙側(cè)觀測站同步推進且位置盡量靠近墻體或結(jié)構(gòu)體。若有已知高等級點,在通視條件下應(yīng)進行聯(lián)測。

圖4 大地四邊形+雙側(cè)自由設(shè)站法
1.2 錨節(jié)點定位方法
狹長受限空間錨節(jié)點定位數(shù)據(jù)處理步驟如圖5所示。首先,選擇上一節(jié)介紹的方法布設(shè)并建立錨節(jié)點控制網(wǎng);其次,利用Leica-S910手持測距儀進行平面邊長或平距觀測;再次,建立距離觀測值的誤差方程組,并根據(jù)自由網(wǎng)平差方法迭代求解待求錨節(jié)點的坐標值和方差-協(xié)方差陣;最后利用已知公共點進行坐標轉(zhuǎn)換,實現(xiàn)室內(nèi)外坐標框架統(tǒng)一和外符合精度評定。

圖5 錨節(jié)點定位數(shù)據(jù)處理步驟
下文重點介紹圖5中的錨節(jié)點定位數(shù)據(jù)處理方法。本文錨節(jié)點控制網(wǎng)為測距或測邊自由網(wǎng),須先建立距離觀測值的誤差方程。設(shè)兩錨節(jié)點i,j坐標分別為(Xi,Yi)、(Xj,Yj),則兩點之間距離的平差值^Lij可由下式表示

式中:Lij為距離觀測值,vL為觀測改正數(shù)為待求錨節(jié)點的坐標平差值。
對式(1)右端進行泰勒級數(shù)展開至一階項,可得誤差方程

對所有水平邊長或平距觀測量按上述方法建立誤差方程,則可形成誤差方程組。一般情況下,狹長受限空間內(nèi)沒有已知錨節(jié)點坐標,導致控制網(wǎng)缺乏足夠的起算基準,因此需采用秩虧自由網(wǎng)平差方法[19]。換言之,若誤差方程組的系數(shù)矩陣記為B,則相應(yīng)的法方程系數(shù)陣N=BTPB為秩虧矩陣。因此,為了獲得唯一解必須引入約束基準,此時平差函數(shù)模型可表示如下

式中:n,u,d分別為距離觀測的總數(shù)、待估錨節(jié)點數(shù)、附加基準數(shù),V為距離觀測值改正向量,為錨節(jié)點坐標改正向量,l為常數(shù)項,STx為附加約束條件,Px為基準權(quán)陣。
本文采用重心基準為約束條件,其相應(yīng)的約束矩陣STx和基準權(quán)陣Px分別為
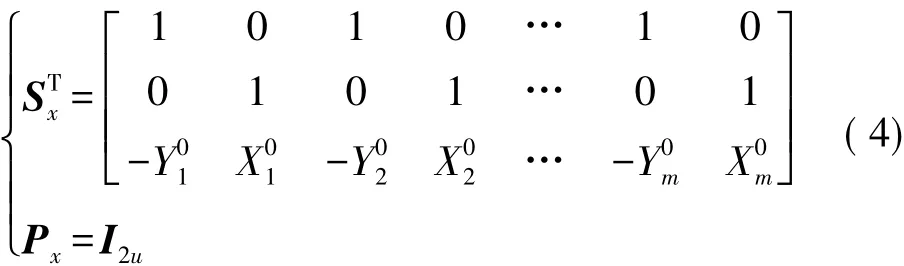
式中:I2u表示2u階單位陣。
根據(jù)最小二乘原理VTPV+2KT(STPx)=min進行求解,可得待估錨節(jié)點的坐標改正數(shù)及其相應(yīng)的協(xié)因數(shù)陣、方差-協(xié)方差陣估計式

式中:Q'=(N+PxSSTPx)-1,N=BTPB,σ0為單位權(quán)中誤差,P為觀測權(quán)陣,Q^x^x表示協(xié)因數(shù)陣,其大小可以反映控制網(wǎng)圖形強度的高低。
2 應(yīng)用結(jié)果及分析
2.1 控制網(wǎng)方案比較
為比較上述4種布網(wǎng)方案優(yōu)劣,利用 Leica-S910在中國礦業(yè)大學室內(nèi)外定位場進行實驗,并通過協(xié)因數(shù)比較控制網(wǎng)圖形強度,測試范圍為中國礦業(yè)大學環(huán)境與測繪學院四樓C區(qū)走廊,走廊總長度約70 m,寬度為2.3 m,在墻體兩側(cè)布設(shè)15個錨節(jié)點,取相鄰錨節(jié)點之間的橫向間距為2.3 m(走廊寬度),縱向間距約為8.8 m(取值依據(jù)見2.2.1),分別使用上述4種方案設(shè)計實驗(以走廊前進方向為縱向正向,橫向正向與其構(gòu)成右手準則,坐標系定義詳見2.2.2節(jié)),按照式(5)計算各方案協(xié)因數(shù)陣,并通過比較縱橫向協(xié)因數(shù)和多余觀測分量確定最佳布網(wǎng)方案。各方案統(tǒng)計結(jié)果如表1所示,協(xié)因數(shù)計算結(jié)果如圖6所示。
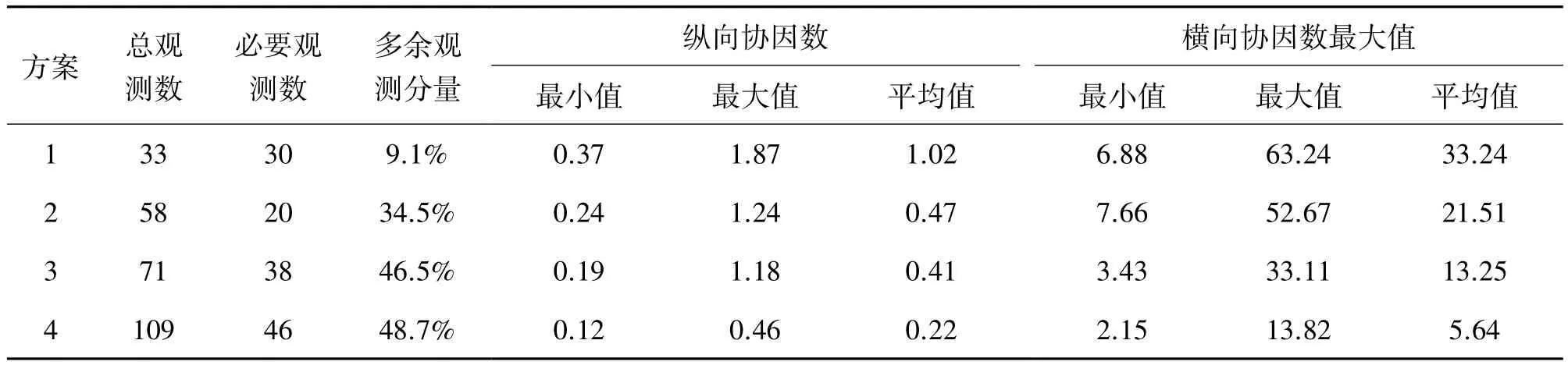
表1 控制網(wǎng)方案1~4統(tǒng)計結(jié)果
從表1可以看出,方案1~4的橫向協(xié)因數(shù)均遠大于縱向協(xié)因數(shù)(這與無砟鐵路、隧道等情況下的協(xié)因數(shù)分布情況基本一致),故狹長型控制網(wǎng)應(yīng)重點分析橫向協(xié)因數(shù)。上述4個方案中,方案1縱橫向協(xié)因數(shù)均為最大,方案2與方案3效果較為接近,但較方案1的縱橫向協(xié)因數(shù)有顯著減小,方案4縱橫向協(xié)因數(shù)最小(縱向均值為0.22、橫向均值為5.64),表明方案4通過兩側(cè)設(shè)置站點顯著提高了橫向的圖形強度,在4個方案中效果最佳。此外,從多余觀測分量也可發(fā)現(xiàn),方案4的多余分量為48.7%,遠遠高于其他3個方案。綜合考慮,建議采用方案4的布網(wǎng)形式。
圖6顯示了各錨節(jié)點的縱橫向協(xié)因數(shù),較全面比較了方案1~4的優(yōu)劣,進一步驗證了方案4為最佳方案。限于篇幅,不再贅述。
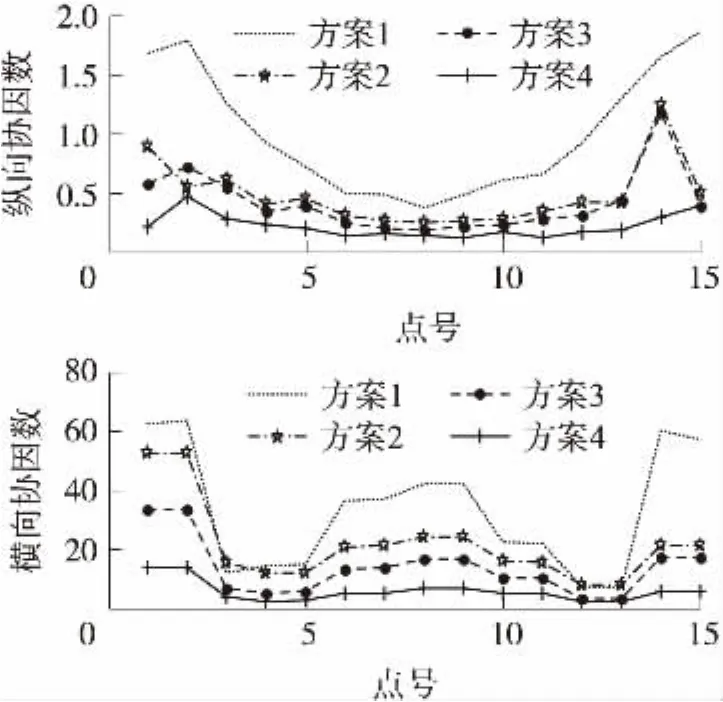
圖6 方案1~4協(xié)因數(shù)計算結(jié)果
2.2 雙側(cè)自由設(shè)站法
2.2.1 控制網(wǎng)優(yōu)化
控制網(wǎng)圖形強度除了受不同布設(shè)方法制約,還受相鄰錨節(jié)點之間的橫向間距和縱向間距等影響,而橫向間距一般取狹長受限空間范圍的寬度。因此,為得到雙側(cè)自由設(shè)站法控制網(wǎng)的最佳幾何圖形強度,本文對協(xié)因數(shù)與橫向縱向間距、錨節(jié)點個數(shù)的關(guān)系進行模擬研究。模擬方案為:(A)選定15對錨節(jié)點,變化橫向、縱向間距,統(tǒng)計協(xié)因數(shù)的變化情況;(B)固定橫向間距為2.3 m,變化縱向間距、錨節(jié)點對數(shù),統(tǒng)計協(xié)因數(shù)的變化情況,模擬結(jié)果見圖7所示。
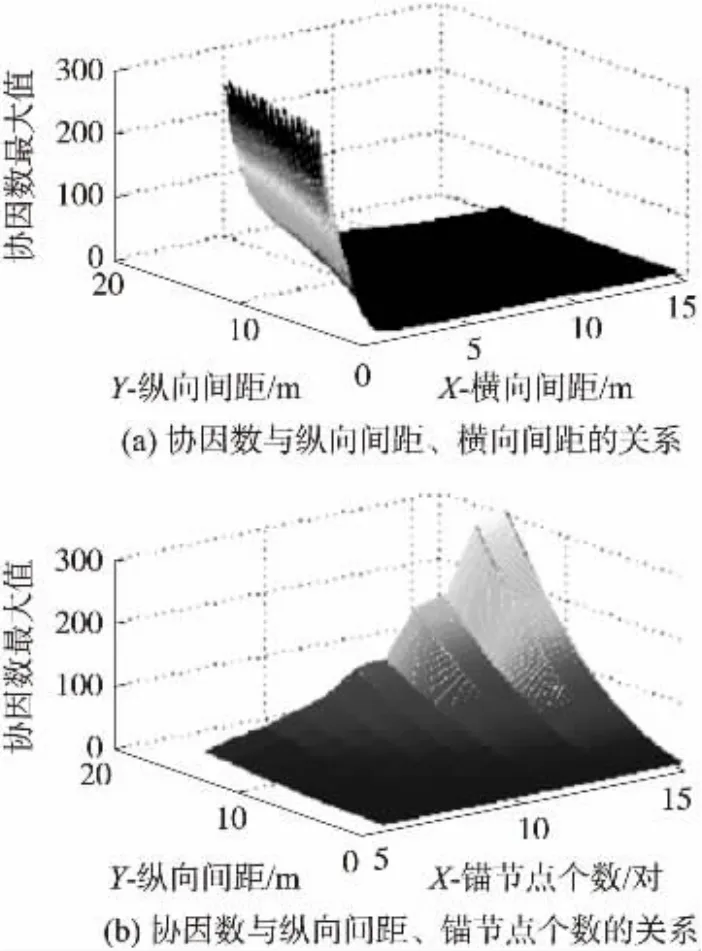
圖7 協(xié)因數(shù)與縱橫向間距、錨節(jié)點對數(shù)的關(guān)系
圖7(a)為錨節(jié)點個數(shù)固定時,協(xié)因數(shù)與橫向、縱向間距的關(guān)系。模擬結(jié)果顯示,縱向間距不變,橫向間距在1.5 m~3.5 m范圍內(nèi)變化時,協(xié)因數(shù)隨橫向間距增加而顯著減小,超過3.5 m后協(xié)因數(shù)基本趨穩(wěn);固定橫向間距情況下,協(xié)因數(shù)隨縱向間距的增加而緩慢增大;同時,提取最大協(xié)因數(shù)為100時的縱向和橫向間距,通過擬合可近似建立控制網(wǎng)圖形強度優(yōu)化函數(shù)u=0.049w2+5.374w-1.499(w表示橫向間距,u表示縱向間距),可得縱向約為橫向間距5倍。圖7(b)為橫向間距固定時,協(xié)因數(shù)與錨節(jié)點個數(shù)、縱向間距的關(guān)系。模擬結(jié)果顯示,縱向間距不變,協(xié)因數(shù)與錨節(jié)點個數(shù)近似呈正相關(guān)關(guān)系,但是在錨節(jié)點個數(shù)由奇數(shù)對增加1對變?yōu)榕紨?shù)對時,協(xié)因數(shù)略微減少或不變;當固定錨節(jié)點個數(shù)時,協(xié)因數(shù)隨縱向間距的變化與圖7(a)相似。結(jié)合圖7(a)和圖7(b)可知,橫向間距在1.5 m~3.5 m范圍內(nèi)變化時,協(xié)因數(shù)顯著增大;縱向間距在整個模擬范圍內(nèi),協(xié)因數(shù)增大相對緩慢;當橫向間距較窄(2.3 m),錨節(jié)點對和縱向間距的增加均會導致協(xié)因數(shù)的顯著增大。
綜上分析可得,當橫向間距可選時,應(yīng)盡量寬于3.5 m;當橫向間距不可選時(取狹長受限空間寬度),根據(jù)上文控制網(wǎng)圖形強度優(yōu)化函數(shù),縱向間距應(yīng)不超過橫向間距的3~5倍,同時,錨節(jié)點盡量布設(shè)成偶數(shù)對。此外,對于超長的狹長受限空間錨節(jié)點控制網(wǎng),可采用分組或分區(qū)平差以便削弱誤差積累。
2.2.2 定位試驗
為了進一步驗證上述雙側(cè)自由設(shè)站法的準確性和有效性,利用Leica-S910在中國礦業(yè)大學室內(nèi)外定位場進行錨節(jié)點定位試驗及精度分析。測試范圍為中國礦大環(huán)境與測繪學院四樓A區(qū)和C區(qū)的走廊,走廊寬度2.3 m,總長度約150 m,范圍內(nèi)已知高等級點3個,另布設(shè)了31個錨節(jié)點(根據(jù)3.2.1節(jié)圖形強度優(yōu)化函數(shù),相鄰錨節(jié)點橫向間距取走廊寬度2.3 m、縱向間距約8.8 m)。設(shè)C區(qū)端點為原點,定義C區(qū)走廊前進方向為X坐標軸正向,即縱向方向,Y軸與X軸構(gòu)成右手坐標系,Y軸正向記為橫向方向。所建錨節(jié)點坐標系及平面分布見圖8所示。
按雙側(cè)自由設(shè)站法建立錨節(jié)點控制網(wǎng),并進行水平邊長或平距測量(3個高等級點處均設(shè)站觀測)。試驗共得距離觀測量228個,未知參數(shù)98個,附加基準3個,多余觀測為133個,按照2.2節(jié)方法求解待錨節(jié)點坐標及中誤差。結(jié)果顯示,橫向總體誤差為7.8 cm、縱向總體誤差為12.9 cm、點位總體誤差為15.1 cm,能夠滿足定位的需求。限于篇幅,部分平差結(jié)果如表2所示。利用試驗范圍內(nèi)的已知高等級點(最弱點點位誤差約5 cm)進行坐標轉(zhuǎn)換。結(jié)果顯示,坐標轉(zhuǎn)換誤差最大值為35 cm、中誤差為26 cm,不超過自由網(wǎng)平差總體中誤差(15.1 cm)的 2倍水平,且遠遠高于室內(nèi)定位精度要求[4](1 m~3 m),從而驗證了本文方法正確性和有效性。

圖8 錨節(jié)點點位分布
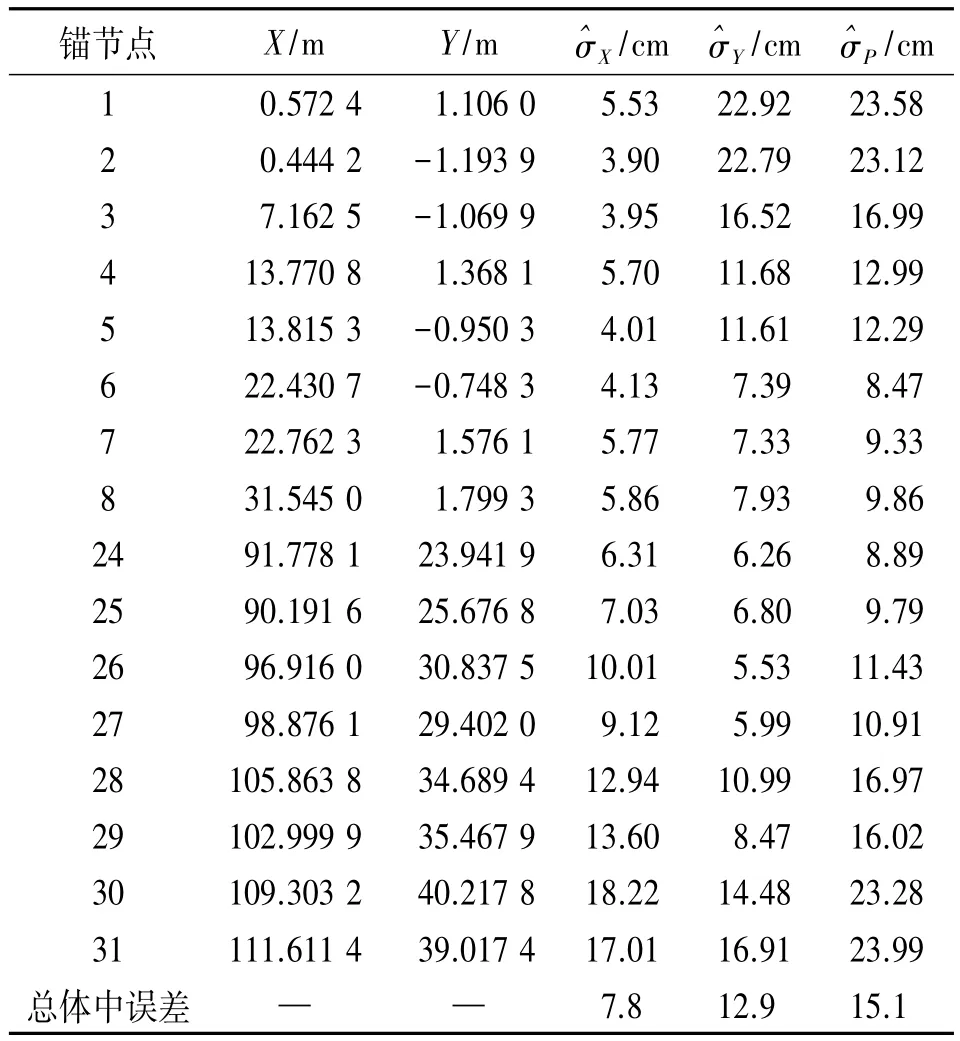
表2 錨節(jié)點坐標平差結(jié)果
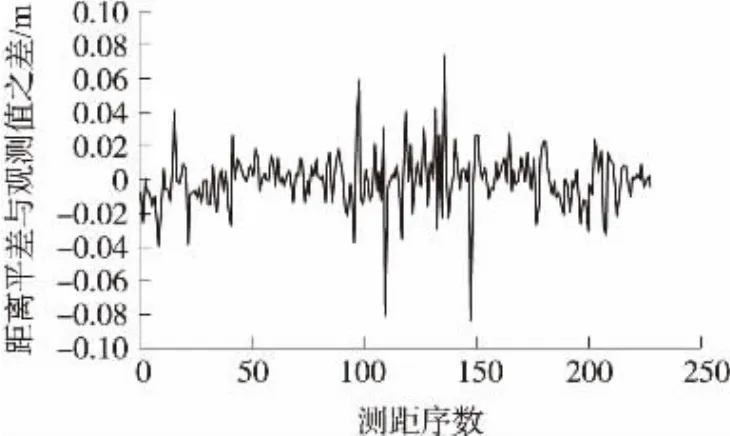
圖9 距離平差值與觀測值之差
3 結(jié)論
根據(jù)平差后的坐標值可反算相鄰點之間的距離,平差距離和距離觀測值之差可以反映Leica-S910的測距精度,平差距離與觀測值之差如圖9所示。由該圖可得,錨節(jié)點坐標反算的平差距離與觀測距離差值最大值7.2 cm,最小值-8.4 cm,平均值1.2 cm,除個別殘差較大以外,其他多數(shù)殘差在±2 cm范圍內(nèi)隨機分布,說明距離觀測質(zhì)量較好。需說明的是,上述統(tǒng)計誤差遠超過Leica-S910的mm級標稱精度,其原因是本文顧及實際應(yīng)用的快速性要求而未做精確的儀器安置和瞄準工作。
①針對狹長受限空間下錨節(jié)點定位方法的不足,探討了狹長受限空間下4種錨節(jié)點快速測距控制網(wǎng)布設(shè)方法(大地四邊形法、中線自由設(shè)站法、改進的中心自由設(shè)站法和所提出的雙側(cè)自由設(shè)站法),分析了各布網(wǎng)方法的整體精度和多余觀測分量,結(jié)果表明雙側(cè)自由設(shè)站法的多余觀測分量最多、精度最高。
②對協(xié)因數(shù)與橫向縱向間距、錨節(jié)點個數(shù)的關(guān)系進行模擬研究,推導了錨節(jié)點控制網(wǎng)圖形強度優(yōu)化函數(shù)并提供了優(yōu)化策略。中國礦業(yè)大學室內(nèi)外定位場錨節(jié)點定位的測距儀雙側(cè)自由設(shè)站法結(jié)果表明,橫向總體誤差為7.8 cm,縱向總體誤差為12.9 cm,點位總體誤差為15.1 cm,完全滿足錨節(jié)點定位精度要求。
[1] 王寧,秦小麟,沈堯.基于梯度的受限空間安全定位方法[J].計算機科學,2014,41(1):156-162.
[2] 張晉升,孫健,李勝廣,等.狹長空間基于人體穿透損耗模型的組合定位方法[J].傳感技術(shù)學報,2016,29(4):601-605.
[3] 田豐,秦濤,劉華艷,等.煤礦井下線型無線傳感器網(wǎng)絡(luò)節(jié)點定位算法[J].煤炭學報,2010,35(10):1760-1764.
[4] 劉志平,余前勇.手機傳感器融合的室內(nèi)三維定位試驗研究[J].山東科技大學學報(自然科學版),2015,34(6):90-95.
[5] Deng Zhongliang,Yu Yanpei,Yuan Xie,et al.Situation and Development Tendency of Indoor Positioning[J].China Communications,2013,10(3):42-45.
[6] 方旺盛,高銀.狹長直隧道環(huán)境中WSN的RSSI加權(quán)質(zhì)心定位算法[J].傳感技術(shù)學報,2014,27(2):247-251.
[7] Go S,Chong J W.Improved TOA-Based Localization Method with BS Selection Scheme for Wireless Sensor Networks[J].Etri Journal,2015,37(4):707-716.
[8] Ma D,Meng J E,Wang B,et al.Range-Free Wireless Sensor Networks Localization Based on Hop-Count Quantization[J].Telecommunication Systems,2009,50(3):1-15.
[9] Yan X,Qian H,Yu J.A Selective Beacon Node 3D Location Estimation Based on RSSI for Wireless Sensor Network[J].Information Technology Journal,2013,12(1):40-50.
[10]傅賢鋒,黃亮,黃潔,等.基于超聲波四元陣測距的無錨節(jié)點定位算法研究[J].儀器儀表學報,2013,34(12):2874-2880.
[11]姬靖,劉桂雄,郁文生.傳感網(wǎng)中的四錨點節(jié)點定位實解個數(shù)分析[J].軟件學報,2014(11):2627-2635.
[12]Fischer C,Gellersen H.Location and Navigation Support for Emergency Responders:A Survey[J].IEEE Pervasive Computing,2009,9(1):38-47.
[13]Ahmed A A,Al-Shaboti M,Al-Zubairi A.An Indoor Emergency Guidance Algorithm Based on Wireless Sensor Networks[C]// International Conference on Cloud Computing.2015:1-5.
[14]王群,錢煥延,戚盠,等.一種應(yīng)急環(huán)境下無線傳感網(wǎng)節(jié)點接入與定向擴散方法[J].東南大學學報(自然科學版),2014,44 (2):244-249.
[15]郝亞東,李聚方,劉利.高鐵無砟軌道控制網(wǎng)測設(shè)和精度控制[J].測繪通報,2011(8):51-53.
[16]全志強,高占英.鐵路有砟軌道CPⅢ網(wǎng)測量方法及精度探討[J].測繪通報,2013(4):56-58.
[17]石德斌,王長進,李博峰.高速鐵路軌道控制網(wǎng)測量和數(shù)據(jù)處理探討[J].鐵道工程學報,2009,26(4):26-30.
[18]周凌焱,劉成龍,高洪濤,等.高鐵隧道洞內(nèi)控制網(wǎng)測量新方法的應(yīng)用[J].測繪科學技術(shù)學報,2014,31(6):570-575.
[19]崔希璋.廣義測量平差[M].武漢:武漢大學出版社,2009.

劉志平(1982-),漢族,江西九江人,副教授、碩導,主要從事測量數(shù)據(jù)融合、導航位置服務(wù)、大地測量反演,zhpliu @cumt.edu.cn;zhpnliu@163.com;

朱丹彤(1993-),漢族,河南濮陽人,碩士研究生,主要從事測量數(shù)據(jù)融合處理方法與應(yīng)用,18639388058@163.com。
Bilateral-Free Setting Station Method Using Hand-Held Laser Ranger for Anchor Node Positioning in Long-Narrow Confined Spaces*
LIU Zhiping*,ZHU Dantong,YANG Lei,ZHANG Qiuzhao
(School of Environment and Spatial Informatics,China University of Mining and Technology,Xuzhou Jiangsu 221116,China)
Aiming at the problem that the existed anchor node positioning methods cannot be successfully applied in the long-narrow confined spaces,this paper proposed trilateration network layout methods including both center-free station method and bilateral-free station method based on both geodetic quadrilateral method and free station method.Redundant observations and coordinates variance-covariance matrix of four trilateration network layout methods mentioned above are computed and analyzed,and results show the bilateral-free station method is the best one.Further,the structure strength function of the bilateral-free station method is investigated in detail.At the end,to test the accuracy and reliability of the bilateral-free station method,anchor node positioning experiment using Leica-S910 hand-held laser ranger is implemented in the indoor-outdoor location test field of China University of Mining Technology.The positioning results show the bilateral-free station method can get the optimized trilateration network with the position RMSE 15.1cm which can satisfy the accuracy requirement in long-narrow confined spaces.
anchor node positioning;bilateral-free station method;hand-held laser ranger;long-narrow confined spaces
10.3969/j.issn.1004-1699.2017.02.018
P25
A
1004-1699(2017)02-0272-06
無線傳感器技術(shù)
項目來源:國家自然科學基金項目(41204011,41504032);大地測量與地球動力學國家重點實驗室開放基金項目(SKLGED2014-3-2-E);江蘇高校優(yōu)勢學科建設(shè)工程項目(SZBF2011-6-B35)
2016-07-27 修改日期:2016-10-31
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56