空管二次雷達數據仿真系統(tǒng)的設計與實現
2017-04-14 10:34:40郭金亮
軟件 2017年2期
關鍵詞:系統(tǒng)
姜 鵬,張 喆,郭金亮
空管二次雷達數據仿真系統(tǒng)的設計與實現
姜 鵬1,張 喆2,郭金亮1
(1. 中國民航珠海進近管制中心,廣東 珠海 519015;2. 中國民航大學,天津 300300)
主要研究了空管二次雷達數據仿真系統(tǒng)的設計思路與實現方式。利用大地坐標投影算法實現雷達目標從WGS84空間坐標到平面直角坐標的轉換,并將轉換后的平面直角坐標進行平移,得出雷達目標相對于雷達站的距離以及方位。結合以上參數,按照ASTERIS CAT001標準雷達數據幀格式對雷達目標的各參數信息進行編排,封裝成HDCL同步數據并發(fā)送,實現二次雷達數據仿真的目的。二次雷達數據仿真系統(tǒng)具有廣泛的推廣前景和應用價值,可以被廣泛應用于雷達數據研究、空管自動化系統(tǒng)告警測試等領域。
雷達;數據仿真;空中交通管理;地圖投影;坐標轉換;ASTERIX
0 引言
目前,已被廣泛應用于民用航空領域的空管二次雷達,來源于空戰(zhàn)中區(qū)分敵我雙方飛機的敵我識別系統(tǒng),將其與飛行計劃信息處理結合而形成的空管自動化系統(tǒng)是目前空中交通管制行業(yè)實施雷達管制的主要手段。近年來伴隨著我國航空事業(yè)的不斷發(fā)展,航班量不斷增加,空域流量愈加繁忙,二次雷達作為對空監(jiān)視的主要手段,對其數據的分析和研究已逐漸成為空管核心數據研究的熱點;相關研究成果的投入使用,對實際的空管安全運行及工作效率的提升都會起到很大的幫助[1]。
由于雷達設備構造復雜,價格昂貴,在科研以及教學領域很難以直觀、經濟的方式進行數據分析和研究,而利用計算機仿真技術卻可以很好滿足這一需求[2,3]。在國內,對雷達數據仿真技術的研究尚剛剛起步,二次雷達數據的模擬仿真系統(tǒng)也較多,但功能大多與空管實際業(yè)務相差較大,或只側重對雷達信號的分析處理而缺乏仿真輸出的功能,或仿真的效果與實際需要出入較大,無法直接應用等;此外,現空管單位使用二次雷達仿真系統(tǒng)普遍存在數據輸出格式單一,受限于特定空管自動化系統(tǒng)的情況,不便于市場推廣應用。本文介紹了空管二次雷達數據仿真系統(tǒng)的設計思路,通過地圖投影、坐標系轉換等技術完成空管二次雷達數據仿真系統(tǒng)地搭建,并按照ASTERIX標準格式進行數據編排,以UDP網絡數據[4]或者HDLC數據格式輸出,理論上不受自動化系統(tǒng)數據格式限制,可直接應用于各類空管自動化系統(tǒng);此外,本文所涉及的系統(tǒng)還支持對多種格式雷達數據的解碼分析,可用于空管雷達數據質量監(jiān)視或進一步分析處理等。
1 二次雷達數據仿真系統(tǒng)的設計思路
二次雷達系統(tǒng)的工作原理是通過地面雷達詢問與機載應答機的應答,來快速獲取飛機的應答機編號、高度、距離、方位等參數,再通過計算機系統(tǒng)的處理即可將目標信息顯示在計算機屏幕上。要實現二次雷達目標在處理中心屏幕上的動態(tài)顯示,需要對雷達目標位置及背景地圖數據進行投影和坐標系轉換等一系列處理并按照標準的雷達數據格式進行封裝輸出,因此數據仿真系統(tǒng)的總體設計由三部分組成:地圖投影、坐標系轉換、ASTERIX標準格式數據封裝,整個過程如圖1所示。
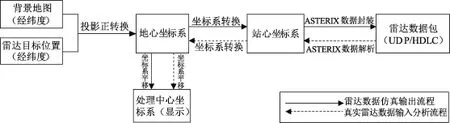
圖1 二次雷達仿真系統(tǒng)設計原理Fig.1 Design principle of Secondary Radar Simulation System
2 大地坐標系投影
大地坐標系是大地測量工作中所使用的基準坐標系,大地坐標系的確立需要確定一個大小和形狀與大地體相近,且兩者位置相對固定的旋轉橢球作為參考橢球,參考橢球面是大地測量計算所使用的參考面,地面上任何點的坐標均可以通過大地經度L、大地維度B以及大地高度H三個參數來表示。目前世界各地根據本國大地測量使用不同的參考橢球,但比較通用的是WGS-84大地坐標系,其坐標原點為地球質心,采用國際大地測量與地球物理聯(lián)合會第17屆大會大地測量常熟推薦值[5],如表1所示。

表1 WGS-84參數
在確定參考橢球體后,需要將以參考橢球體基準面所確定的球面坐標轉換為平面直角坐標,即利用一定的數學算法將大地坐標系中的經線和緯線投射到平面上,這種技術稱之為地圖投影。但由于地球球體本身的不規(guī)則形,因此導致其無法展開形成一個平滑的曲面,因此至今沒有任何一種數學算法能做到絕對的精確無誤,由此按照不同的需求產生了多種投影方法。本文采用在WGS-84橢球體上的高斯-克呂格(Gauss-Kruger)投影方式,它的投影原理是設想一個與橢球面中央子午線橫切的橢球圓柱。以中央子午線為中心,兩側按照一定的經度差投影于圓柱表面,再將圓柱表面按照南北極方向的母線剪開,形成的平面即為高斯投影平面[6]。高斯投影平面的原點為中央子午線與赤道投影線的交點,中央子午線方向為x軸,赤道方向為y軸,構成了高斯-克呂格投影直角坐標系。高斯-克呂格投影長度和面積上的變形較小[7],在我國大、中比例尺地圖的投影中多采用該方法。
高斯投影的正算就是已知大地坐標(L,B)求解高斯投影平面坐標(x,y),其計算公式為[8]:
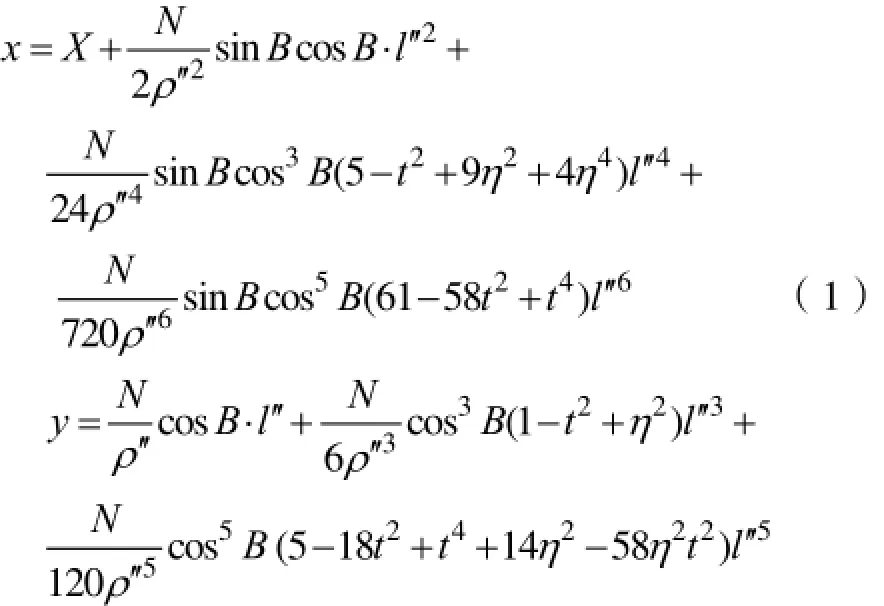
式1中,角度均為弧度。X為子午線弧長,l′′=L-L0(L0為中央子午線經度),t=tgB,(ab、為橢球體長短半軸),N=,稱作極曲率半徑)。
高斯投影的反算就是已知高斯投影平面坐標(x,y),求解大地坐標(L,B),其計算公式為:
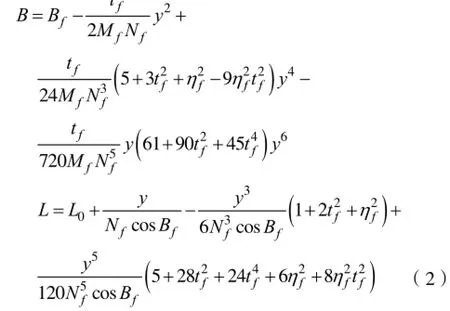
t
3 坐標系轉換
在輸出想要仿真的二次雷達數據,首先要確定雷達數據包中各參數的值,由于雷達輸出的數據是以雷達的坐標為中心的站心坐標系,要仿真輸出二次雷達數據,首先得由于是文獻[5]對各類坐標系轉換的方法進行了對比,得出采用地心坐標系作為統(tǒng)一坐標系進行轉換可以較少地球曲面誤差的結論[9],本文中也采用類似方法,以地心坐標系作為統(tǒng)一坐標系進行坐標轉換。
3.1雷達目標地心直角坐標系到站心極坐標系的轉換
在雷達數據仿真的目的是動態(tài)的輸出雷達數據,以模擬真實雷達目標的運動軌跡,按照標準ASTERIX雷達數據幀的格式要求,在目標坐標、速度矢量等參數已知的前提下,需要將雷達目標的地心坐標轉換為以雷達站為中心的極坐標,即雷達目標相對于雷達站的距離(rho)、方位(theta),如圖2所示。
3.1.1 計算目標相對于雷達站的距離
假設雷達站的投影坐標為(Xradar,Yradar),雷達目標的投影坐標為(Xp,Yp),根據勾股定理就可以計算出目標相對于雷達站的距離,方法如下:

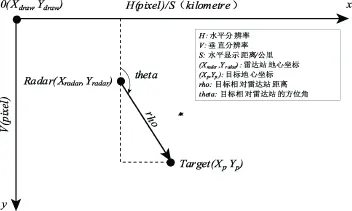
圖2 目標相對于雷達的距離和方位推算Fig.2 Distance and orientation of the target relative to the radar
3.1.2 計算目標相對于雷達站的方位
雷達目標相對于雷達站的方位(theta)是指雷達站與目標之間連線與雷達站正北方向的順時針夾角,計算雷達站的方位需要考慮象限因素的影響。
當目標位于雷達站為中心的第一象限時,計算方法如下:

當目標位于雷達站為中心的第二、三象限時,計算方法如下:

當目標位于雷達站為中心的第四象限時,計算方法如下:3.2地心坐標系到處理中心坐標系到的平移

如何將已知經緯度坐標的目標動態(tài)的顯示在雷達處理中心的屏幕上,除了完成2.1中大地坐標與地心坐標之間相互轉換外,還需要實現屏幕坐標與地心坐標的二次轉換,由于處理中心雷達屏幕坐標與地心坐標均為二維平面坐標,因此這種轉換是通過X軸、Y軸坐標平移的方式進行的[10],轉換步驟如下。
3.2.1 確定處理中心雷達屏幕顯示范圍以及顯示比例
用S表示屏幕水平顯示的最大地理距離,W表示屏幕的水平分辨率,假設屏幕水平顯示范圍S=400公里,屏幕的水平分辨率W=800像素,那么很容易得出屏幕顯示比例,即S/P=400/800=0.5公里/像素。
3.2.2 根據中心點的地心坐標推算繪圖點的投影坐標
用(centerX、centerY)來表示屏幕中心點的地心坐標,(drawX、drawY)來表示繪圖原點的地心坐標;一般來說,使用各類計算機語言進行編程時,繪圖原點均為畫布的左上角,如圖3所示:其中V為屏幕垂直分辨率,H為屏幕的水平分辨率。
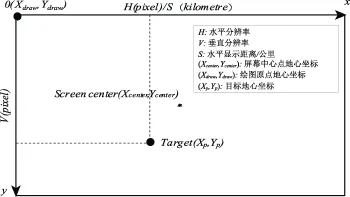
圖3 目標在屏幕上的位置推算Fig.3 Target location on the screen
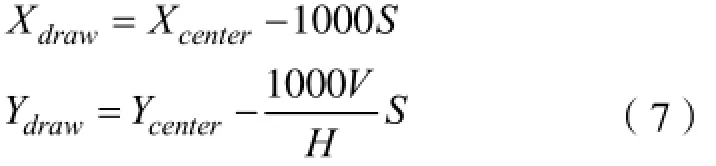
那么在知道中心點地心坐標的前提下,可以根據屏幕長寬比推算出繪圖原點的地心坐標,計算方法如下:
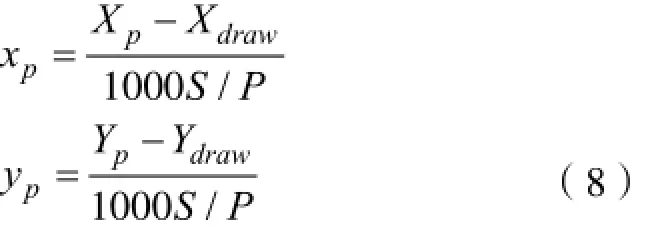
3.2.3 計算目標在處理中心雷達屏幕上的顯示位置
假設某雷達目標地心坐標為(pX,pY),那么可以根據其相對于繪圖原點(drawX,drawY)的相對位置以及屏幕顯示比例/SP得出該目標在屏幕上所顯示的像素位置(px,yp),計算方法如下:
4 ASTERIX雷達格式數據仿真輸出
ASTERIX是多用途結構化歐控監(jiān)視信息交換(All purpose Structured Eurocontrol suRveilance Information eXchange)的縮寫,是歐洲民航合作組織(ECAC)制定的監(jiān)視設備和自動化系統(tǒng)信息交換的標準。ASTERIX標準是為雷達數據的傳輸和交換而專門定義的應用/表述協(xié)議,它是一個雷達目標參數集合,定義了用于交換的空管監(jiān)視信息的詳細結構:下至每一個比特的編碼,上至數據塊的組織便于實現異構的監(jiān)視設備和/或自動化系統(tǒng)之間的信息交換。ASTERIX標準參照ISO/OSI(開放系統(tǒng)互聯(lián))模式中的表述層及應用層(第6,7層)而制定,數據的傳輸可以使用低層的通用協(xié)議,如TCP/IP,X.25,HDLC等,目前ASTERIX雷達數據傳輸主要采用HDLC協(xié)議[11]。
4.1ASTERIX數據幀構成
數據塊(Data Block)是ASTERIX應用實體(空管自動化系統(tǒng)、雷達系統(tǒng))間信息交換的基本單位,由數據類型字段、長度字段、記錄字段組成,如圖4所示。
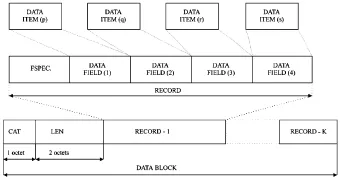
圖4 ASTERIX數據幀格式Fig.4 Format of ASTERIX Data Block
1、數據類別(Data Category):對傳輸的內容進行分類,如CAT001(目標信息),CAT002(服務信息),CAT008(氣象信息)等。
2、記錄(Record):某種數據類別的實體單位,如CAT001的一個記錄用于描述一個雷達目標,CAT002的一個記錄用于描述一個雷達服務(正北/扇區(qū))信息。一個記錄由一個域規(guī)格字段(FSPEC)和若干個數據域(Data Field)組成。
3、域規(guī)格字段(Field Specification,FSPEC):
FSPEC位于一個記錄的最前面,定義了一個記錄里面實際包含的數據域。
4、數據域(Data Field):用于描述記錄(Record)中數據條目(Data Item)的具體實現內容。一個記錄里面由若干個數據域組成,FSPEC里面規(guī)定了該記錄(Record)中所包含的數據域類別,如雷達目標信息類下面的:雷達SAC/SIC地址碼,MODE-C高度等。
4.2ASTERIX CAT001數據幀輸出
雷達仿真程序中,應用最多的是CAT001(目標信息)類型的ASTERIX標準數據幀,表2列舉了其包含的部分常用Data Field。將上文中計算出來的雷達參數按照CAT001數據幀進行封裝,以實現雷達數據仿真輸出的目的,仿真效果如圖5所示。
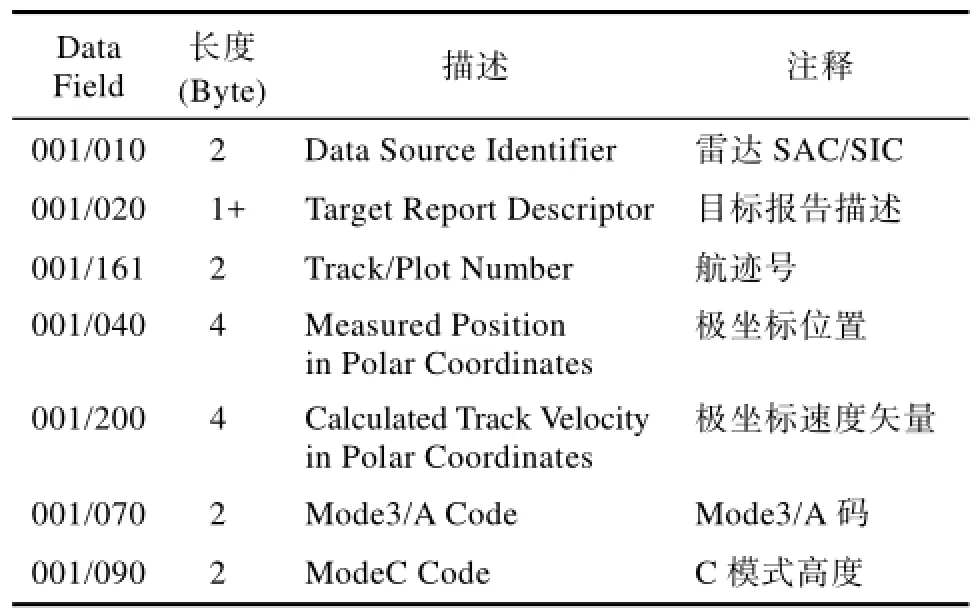
表2 ASTERIX CAT001數據條目
5 結論
本文給出了二次雷達仿真系統(tǒng)的設計理念以及實現方法。先利用高斯投影算法實現大地坐標系到投影坐標系的坐標轉換,再通過坐標系平移,完成雷達目標投影坐標到到處理中心雷達屏幕顯示位置的映射。動態(tài)測算雷達站與目標之間的相對位置,其與目標速度、二次代碼等信息以ASTERIX標準數據幀的格式進行封裝并發(fā)送。該仿真系統(tǒng)的研發(fā)涉及坐標投影、雷達仿真等專業(yè)領域,具備較高的學術價值;從推廣前景來看,該系統(tǒng)使用便捷,擴展性強,可廣泛的應用于雷達數據模擬仿真以及民航空中交通管理等領域。
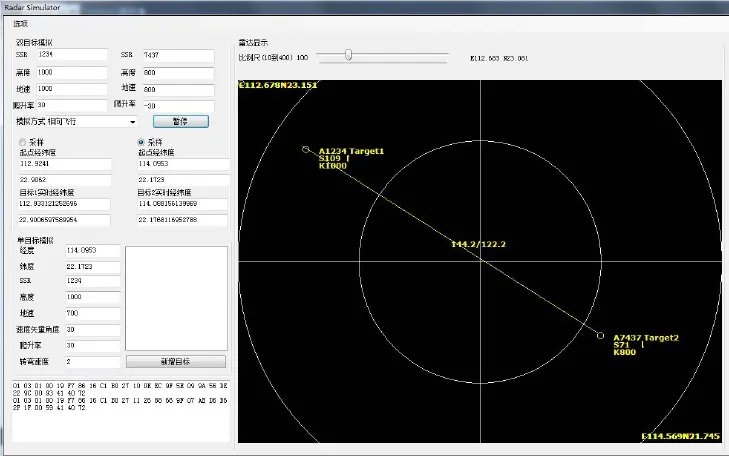
圖5 仿真目標在屏幕上顯示Fig.5 The simulation target display on screen
[1] 劉小兵, 俞靜一, 趙玉奎. 二次雷達工作模式發(fā)展展望[J].軟件, 2012, 33(4): 78-80.
LIU X B, YU J Y, ZHAO Y K. Advances of the Secondary Surveillance Radar work mode[J]. Computer Engineering & Software, 2012, 33(4): 78-80.
[2] 李任增, 文福安. 通信原理虛擬實驗仿真平臺的設計和實現[J]. 軟件, 2013, 34(6): 1-4.
LI R Z, WEN F A. Design and Implementation of Virtual Experiment Simulation Platform Based on Communication Theory[J]. Software, 2013, 34(6): 1-4.
[3] 符應彬. 計算機虛擬技術在現代制造業(yè)中的應用[J]. 軟件, 2013, 34(5): 83-84
FU Y B. Computer Simulation Technology in The Modern Manufacturing Applications. Software, 2013, 34(5): 83-84
[4] 羅星星, 蒲保興, 趙穎, 等. 隨機網絡編碼數據傳輸的仿真實現[J]. 軟件, 2014, 35(8): 32-37.
LUO X X, PU B X, ZHAO Y, et al. Simulation and Implementation of Data Transmission Based on Random Linear Network Coding. Software, 2014, 35(8): 32-37.
[5] 金宏斌, 徐毓, 董峰. 雷達信息處理系統(tǒng)中的坐標變換問題研究[J]. 空軍雷達學院學報, 2003, 17(3): 54-58.
JIN H B, XU Y, DONG F. Research on Coordinate Transformation Under Radar Information Processing Systems[J]. Journal of Air Force Radar Academy, 2003, 17(3): 54-58.
[6] 孫東磊, 趙俊生, 郭忠磊. 對高斯投影與橫軸莫卡托投影差異的研究[J]. 海洋測繪, 2011, 31(1): 9-11.
SUN D L, ZHAO J S, GUO Z L. Research on Difference Between Gauss-Kruger Projection and Transversal Mercator Projection[J]. HYDROGRAPHIC SURVEYING AND CHARTING, 2011, 31(1): 9-11.
[7] 蓋森, 熊偉, 劉建忠, 楊斌. 基于Proj.4的空間坐標轉換[J].測繪工程, 2012, 21(2): 29-38.
GAI S, XIONG W, LIU J Z, YANG B. Spatial coordinate transformation based on Proj.4[J]. ENGINEERING OF SURVEYING AND MAPPING, 2012, 21(2): 29-38.
[8] JUIE ZHU. Conversion of earth-centered earth-fixed coordinates to geodetic coordinates[J]. IEEE Transactions on AES, 1994, 30(3): 957-962.
[9] 李鋒, 金宏斌, 馬建. 多雷達數據處理中坐標轉換的新方法[J]. 微計算機信息, 2007, 23(4): 303-305.
LI F, JIN H B, MA J C. A New Method of Coordinate Transformation Under Multi-Radar Data Processing System[J]. MICROCOMPUTER INFORMATION, 2007, 23(4): 303-305.
[10] 蘇志剛. 雷達視頻地圖的坐標轉換[J]. 中國民航學院學報, 1999, 17(1): 16-18.
SU Z G. The Coordinates Conversion on the Radar Map[J]. JOURNAL OF CIVIL AVIATION UNIVERSITY OF CHINA, 1999, 17(1): 16-18.
[11] 華煒. 淺析標準雷達數據格式ASTERIX[J]. 民航科技, 2001, 2: 14-18.
HUA W. Analysis of Standard radar data format ASTERIX[J]. CIVIL AVIATION SCIENCE & TECHNOLOGY, 2001(2): 29-38.
Design and Implementation of Secondary Radar Signal Simulation System
JIANG Peng1, ZHANG Zhe2, GUO Jin-liang1
(1. Zhuhai Terminal Air Traffic Control Center.CAAC, Zhuhai 519015, China; 2. Civil Aviation Uniaversity of Chiana, Tianjin 300300, China)
This article design and implementation of multi radar signal simulation system. To achieve the conversion of level rectangular coordinate radar target WGS84 space geodetic coordinate coordinates by using the transverse Mercator Projection algorithm, the plane coordinate conversion of the X, Y axis coordinate translation, the target relative to the radar station distance and azimuth, arrangement of all kinds of parameter information of radar target in accordance with the Asterix standard CAT001 radar data frame format, packaging a HDCL synchronization signal to realize the purpose of simulation. The results show that the multi radar signal simulation system is widely used, and can be widely used in the field of Civil Aviation Radar, ATC automation system and radar signal simulation.
Radar; Signal simulation; Air traffic control; Map projection; Coordinate transformation; ASTERIX
TP391.9
: A
10.3969/j.issn.1003-6970.2017.02.003
國家自然科學基金委員會與中國民用航空局聯(lián)合資助項目(U1633107)。
姜鵬(1983-),男,工程師,碩士,主要研究方向:空中交通管理。
姜鵬(1983-),工程師,主要研究方向:空中交通管理。
本文著錄格式:姜鵬,張喆,郭金亮. 空管二次雷達數據仿真系統(tǒng)的設計與實現[J]. 軟件,2017,38(2):10-15
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32