直接轉矩控制在無刷雙饋電機應用中的仿真研究
2017-04-15 11:50:29侯春
數字技術與應用 2016年12期
侯春

摘要:本文結合無刷雙饋電機的特殊結構以及傳統直接轉矩控制策略的原理,分析了無刷雙饋電機直接轉矩控制的基本原理,在此基礎上建立了無刷雙饋電機直接轉矩控制的仿真模型。本文對此模型在亞同步狀態下對其起動特性和帶載調速進行了仿真,并通過實驗數據分析進行了驗證,證明了此種控制方式是在此種模式下是可行的。
關鍵詞:無刷雙饋電機 直接轉矩控制 仿真研究
中圖分類號:TM921.5 文獻標識碼:A 文章編號:1007-9416(2016)12-0006-03
1 無刷雙饋電機直接轉矩控制的基本原理
無刷雙饋電機在運行時類似于繞線式感應電機,不過其極性有別于傳統,無刷雙饋電機的功率繞組pp和控制繞組pc分別相當于繞線式感應電機的定子繞組和轉子繞組,依據繞線式感應電機轉矩與磁鏈的關系,提出無刷雙饋電機的轉矩與磁鏈的關系式為:
式(1)中p為極對數,L為感應系數,為磁鏈,為率繞組與控制繞組磁鏈的夾角,其中下角標p、c分別表示功率繞組和控制繞組。
2 無刷雙饋電機直接轉矩控制系統的仿真模型
2.1 無刷雙饋電機的直接轉矩控制的仿真模型
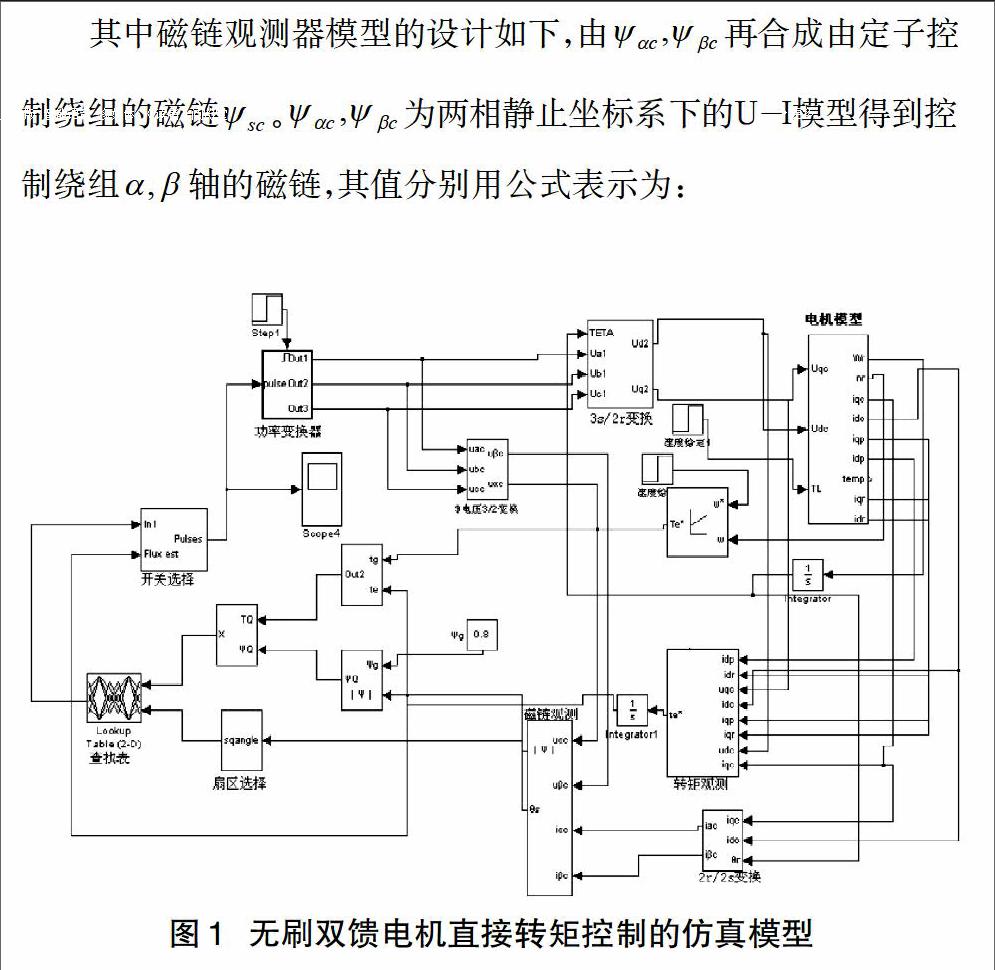
根據無刷雙饋電機、直接轉矩控制的原理,本文將總體的仿真模型分為磁鏈觀測器,轉矩觀測器,磁鏈調節器和轉矩調節器,速度調節器,磁鏈扇區的判斷及開關狀態表的建立,逆變器和查找表的輸入與輸出七個部分,分別搭建仿真模型,由這七個仿真模型構成無刷雙饋電機的直接轉矩控制的仿真模型,如圖1所示:
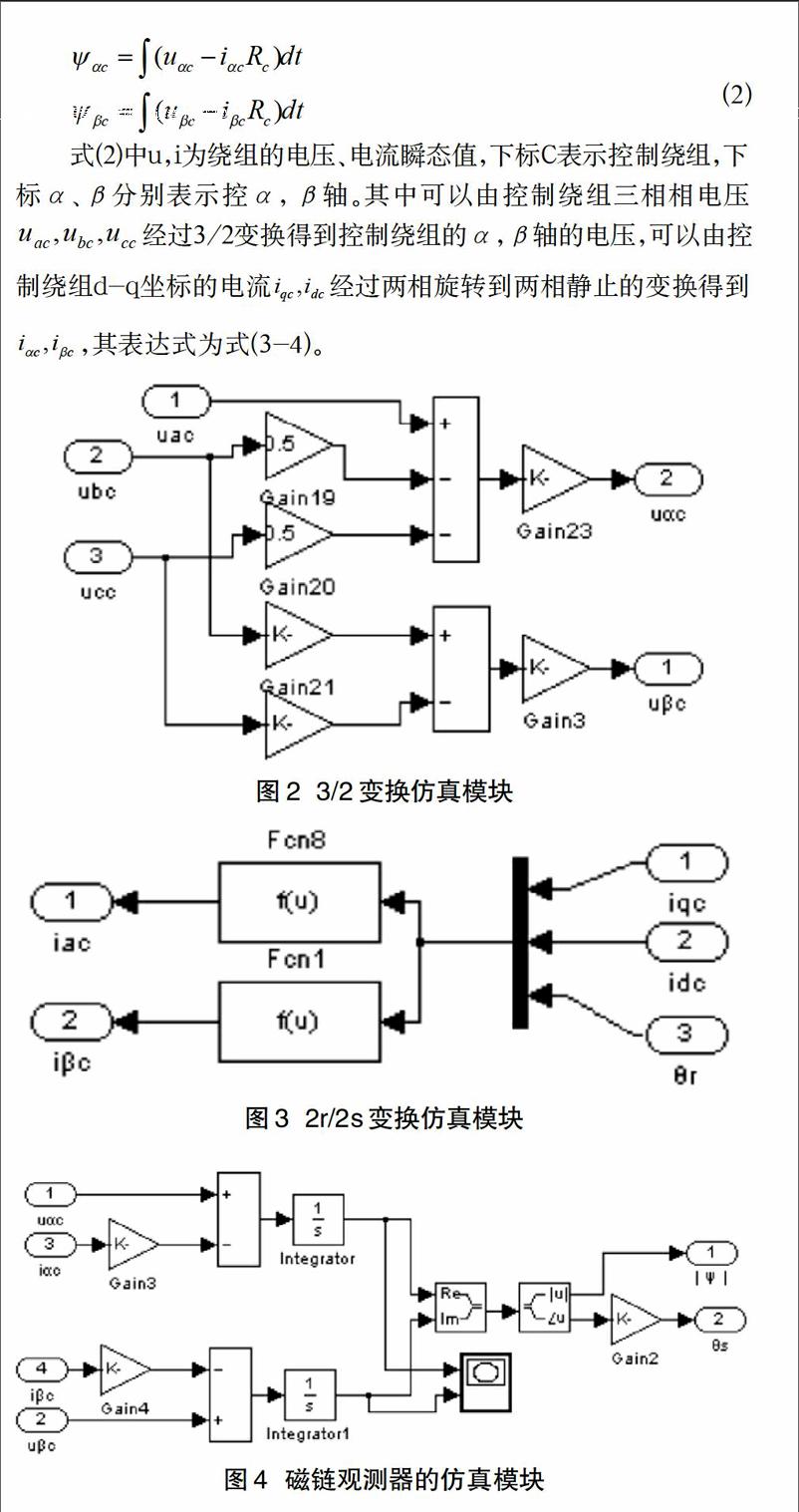
磁鏈觀測器的搭建仿真模型如圖4所示。
2.2 控制系統的仿真波形分析
仿真實驗中,對無刷電機在亞同步、同步以及超同步模式下,分別進行了模擬仿真,均取得良好的控制效果。本文僅以在亞同步狀態下的啟動特性和帶載調速進行研究分析。
2.2.1 在亞同步狀態下起動特性的仿真研究
圖5為無刷雙饋電機在亞同步電動狀態下空載起動特性,圖5(a)表示亞同步電動狀態下空載起動電磁轉矩波形,圖5(b)表示亞同步電動狀態下空載起動轉速波形,由圖5(c)可見控制繞組的電流頻率為3Hz,且與功率繞組圖5(d)的電流反相序。從圖5(a)(b)(c)(d)中可見控制繞組、功率繞組的兩相電流波形為正弦波,0.2s之前時電機單饋啟動到1000 r/min,0.2s時調節給定轉速為700r/min,經過0.4s的調節后電機基本上穩定在700r/min,電磁轉矩穩定在0N.m。 定子側控制繞組的磁鏈給定為0.8wb,由圖5(e)可見,直接轉矩控制的定子控制繞組的空間磁鏈軌跡為圓形,變化頻率與電流同步。磁鏈幅值基本保持不變,維持在給定磁鏈值0.8wb,可見磁鏈能夠得到很好的控制。
2.2.2 在亞同步狀態下帶載調速時的仿真研究
圖6為無刷雙饋電機在亞同步電動狀態下帶載調速時的波形,其中負載為恒轉矩負載。仿真時,負載轉矩保持5N.m,起動2.75s后轉速突變,由650r/min變化到725r/min,功率繞組的電流圖6(d)幅值減小,控制繞組的電流圖6(c)幅值基本保持不變。圖6(a)中在轉速突變的時刻,對應圖6(b)中電磁轉矩Te雖然有波動,但是經過較為短暫時間的調節后,又穩定在和負載轉矩相等的值。
3 結語
電機能夠比較穩定的運行,從而驗證直接轉矩控制方式可以有效地對無刷雙饋電機進行控制,且具有有很好的魯棒性和快速性。
參考文獻
[1]William R.Brassfield, René Spée, Thomas G. Habetler. Direct torque control for brushless doubly-fed machines[J].IEEE transactions on industry applications, 1996(5):1098-1104.
[2]姚俊,馬松輝.Simulink 建模與仿真[M].西安:西安電子科技大學出版社,2002.
[3]李夙.異步電動機直接轉矩控制[M].北京:機械工業出版社,1994.
[4]鄧先明.無刷雙饋電機的電磁設計分析及控制策略的研究[D].中國礦業大學,2007.
[5]張愛玲,張洋.基于轉矩預測控制的無刷雙饋電機直接轉矩控制系統[J].電機與控制學報,2007(4):326-330.
