基于萊特準則的橢圓擬合優(yōu)化算法
2017-04-17 05:19:08曹俊麗李居峰
計算機應用 2017年1期
曹俊麗,李居峰
(上海大學 機電工程與自動化學院,上海 200072)
(*通信作者電子郵箱caojunli1009@163.com)
基于萊特準則的橢圓擬合優(yōu)化算法
曹俊麗*,李居峰
(上海大學 機電工程與自動化學院,上海 200072)
(*通信作者電子郵箱caojunli1009@163.com)
普遍使用的代數(shù)距離最小的最小二乘(LS)橢圓擬合算法簡單、易實現(xiàn),但對樣本點無選擇,導致擬合結果易受誤差點影響,擬合不準確。針對此特性,提出了一種基于萊特準則的橢圓擬合優(yōu)化算法。首先,由代數(shù)距離最小的LS法對待擬合曲線進行橢圓擬合;其次,將待擬合曲線上的點與LS法擬合的橢圓的代數(shù)距離作為樣本點集,在驗證該樣本點集服從正態(tài)分布的情況下,采用萊特準則,將樣本點中值大于|3σ|的點判定為野值并剔除,進行多次擬合,直至樣本點中無野值;最后,得到橢圓最優(yōu)擬合結果。仿真實驗結果表明,優(yōu)化算法的擬合誤差在1.0%以下,相比同條件下的LS法,其擬合精度至少提高2個百分點。優(yōu)化算法的仿真結果與其在香煙圓度在線檢測中的實際應用驗證了此算法的有效性。
萊特準則;橢圓擬合;最小二乘法;圓度檢測;視覺檢測系統(tǒng)
0 引言
圖像處理技術在現(xiàn)代工業(yè)中有著非常廣泛的應用,在計算機圖像處理技術中,曲線擬合是其基本內(nèi)容之一,目的是從圖像中抽取特征信息進行后續(xù)處理。最常用的曲線擬合方法是最小二乘法,其根據(jù)目標函數(shù)進行相應曲線擬合。點、直線以及二次曲線例如橢圓、圓等是基本的圖像特征。現(xiàn)實生活中,大量物體的透視投影由于鏡頭與被拍攝物體角度的關系均為橢圓,所以橢圓擬合是后續(xù)物體辨識與測量的重要條件[1]。但是在實際圖形檢測中,有大量噪聲和用基本圖像處理技術難以剔除的孤立點,所以需要找到一種更加有效、易用的橢圓擬合算法。
目前常用的橢圓擬合方法有最小二乘法[2-3]、Hough變換法[4-5]和Kalman濾波法[6]。這些方法中, 基于最小二乘的方法適用于各種復雜的對象模型[7]。最小二乘法中根據(jù)距離的定義,一般又分為:基于代數(shù)距離最小的方法和基于幾何距離最小的方法[8]。基于代數(shù)距離最小的方法為通過使各離散點到要擬合橢圓的代數(shù)距離平方和最小來確定橢圓各個系數(shù)。該算法簡單、易實現(xiàn),并且可以得到閉合結果,但是它將所有樣本點都當作準確值,當出現(xiàn)噪聲時擬合誤差較大,識別率下降。基于幾何距離最小的方法是將誤差距離定義為給定點到幾何特征擬合點之間的正交的最短距離。該方法理論上比代數(shù)擬合有更好的擬合結果,但是該算法的目標函數(shù)表達式復雜,且求解量很大,不易實現(xiàn),所以最小二乘擬合橢圓中該方法并不常用。萊特準則對橢圓擬合進行優(yōu)化的前提就是使用最小二乘法的代數(shù)距離最小方法擬合一次橢圓,然后針對該方法的缺點與不足進行優(yōu)化與改進。
本文開發(fā)的香煙圓度檢測系統(tǒng),是在無法從端面獲取香煙參數(shù)的情況下,結構光在煙條縱截面上方一定距離處以固定角度照射在煙條上,形成月牙狀光斑。工業(yè)相機在光斑垂直正上方進行圖像抓取。因為圖像中獲得的投影光斑僅能得到近似于1/3的弧段,所以最主要的工作是根據(jù)該段不完整輪廓進行最優(yōu)橢圓擬合。但在拍攝過程中,因為煙條的高速運動和外界震動,不可避免地會存在誤差較大的樣本擬合點。若只用最小二乘法進行擬合,擬合誤差較大,不能滿足檢測要求。因此本文提出一種改進算法:基于萊特準則的橢圓擬合算法,該算法可以剔除誤差點,得到更加準確的擬合橢圓,從而可以準確地計算香煙圓度。
1 基于代數(shù)距離的最小二乘橢圓擬合
基于代數(shù)距離最小的最小二乘橢圓擬合方法已經(jīng)被廣泛使用,具體算法步驟本文不再詳細介紹,可參考文獻[9-11]。平面內(nèi)有點M(x0,y0),曲線方程f(x,y)=0,則f(x0,y0)指的就是點M到曲線的代數(shù)距離。因為最小二乘法通過最小化誤差的平方和尋找數(shù)據(jù)的最佳函數(shù)匹配,則將樣本點距離該曲線的代數(shù)距離作為誤差,運用最小二乘法得到的橢圓擬合目標函數(shù)為:

(1)
其中:i=1,2,…,N。通過求目標函數(shù)的最小值來確定橢圓參數(shù)A、B、C、D、E,由極值原理可知,求最小值需要:
(2)
由此得到一個方程組:
(3)
通過解線性方程組可得知方程系數(shù)(A,B,C,D,E)的值,從而初步確定出橢圓的信息,可以得知橢圓的長軸:
(4)
短軸:
(5)
旋轉角度:
(6)
其中x0、y0為該橢圓的中心坐標。
2 萊特準則優(yōu)化橢圓擬合算法
根據(jù)高斯誤差理論,當測量值服從正態(tài)分布時,殘差落在三倍方差,即[-3σ,3σ]區(qū)間的概率超過99.7%,落在此區(qū)間外的概率只有不到0.3%,因此,可以認為殘差落于該區(qū)域之外的測量值為異常值[12]。這就是萊特準則判別方法,也常稱為3σ方法。
2.1 采樣點正態(tài)分析
待擬合曲線為圖1中的虛線曲線,黑色橢圓曲線為最小二乘法擬合的結果。XOY坐標系為像素坐標系。過待擬合曲線上一點p′與橢圓中心o′作連線,連線與橢圓交于點p,則p′p為兩點間的代數(shù)距離,也是橢圓優(yōu)化算法的輸入值。
因萊特準則具有一個約束條件,要求數(shù)據(jù)服從正態(tài)分布,所以對輸入值進行正態(tài)分析檢驗。
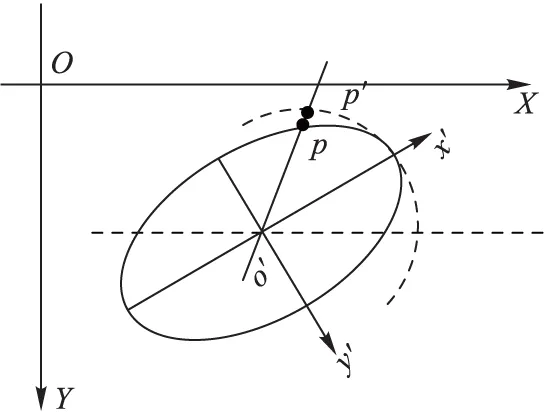
圖1 萊特準則數(shù)據(jù)樣本點集
如圖2所示,使用Minitab軟件對一組實驗數(shù)據(jù)(單位:mm)進行正態(tài)檢驗,圖2中橫坐標表示由圖1中得到的兩點間的代數(shù)距離,縱坐標表示各值分布的概率密度。P(圖2中的P-Value)值在Minitab中表示假設事件的差異性,在統(tǒng)計學中通常用0.05作為判斷標準。P大于0.05表示假設的事件無差異,小于0.05表示有差異。假設該組數(shù)據(jù)服從正態(tài)分布,檢驗結果顯示P=0.422>0.05,表示假設的數(shù)據(jù)服從正態(tài)分布事件無差異。通過多組實驗數(shù)據(jù)驗證,由p′p構成的數(shù)組服從正態(tài)分布,說明可以使用萊特準則進行分析。
2.2 基于萊特準則進行橢圓優(yōu)化
在OpenCV中,橢圓擬合函數(shù)cvFitEllipse[13-15]擬合橢圓的原理就是利用最小二乘法。由此函數(shù)可得到擬合出的橢圓在像素坐標系下的中心o′(center.x,center.y),橢圓的長軸a,短軸b,以及偏轉角θ。以o′為原點的坐標系x′o′y′和圖像像素坐標系XOY間的關系如圖1所示。則代數(shù)距離最小的最小二乘法擬合的橢圓在XOY坐標系下的方程為:
(7)
x=x′+center.x
(8)
y=y′+center.y
(9)
待擬合曲線上的每點坐標可由OpenCV函數(shù)得知,過橢圓中心與待擬合曲線上某點的直線方程為:
(10)
其中p′(xi,yi)為待擬合曲線上某點的坐標。

圖2 樣本點正態(tài)分析結果
聯(lián)立方程(7)~(10),求出點p′(xi,yi)與其對應的擬合橢圓上的點p(xi,yi)像素坐標,則兩點間的代數(shù)像素距離為:

對樣本點集l(i)進行基于萊特準則的數(shù)據(jù)分析,將l(i) 中存在的誤差點剔除。根據(jù)萊特準則,首先計算該組樣本點集的算術平均值:
(12)
其次,計算標準差σ:
(13)
則該組數(shù)據(jù)的殘差lb(i):
(14)
根據(jù)萊特準則,若lb≤-3σ或者lb≥3σ,則i點表示的點為粗大誤差點,利用相關函數(shù)將該點在待擬合曲線上剔除。然后運用最小二乘法對新的待擬合曲線進行橢圓擬合。重復上述步驟,直至l(i)的殘差lb(i)均在|3σ|內(nèi),表示該組數(shù)據(jù)中沒有誤差點,最終擬合的橢圓為最優(yōu)橢圓。根據(jù)實驗顯示,基于此算法進行橢圓擬合,可以降低擬合誤差,并且該算法也適用于不完整曲線的橢圓擬合。因為算法的計算量較少,在樣本點數(shù)量為600~1 000時,運行時間可以控制在10ms內(nèi),可以滿足檢測生產(chǎn)線上速度為9m/s以下的香煙圓度的要求。
3 算法測試
3.1 仿真測試
本文提出的優(yōu)化算法基于VS2013、OpenCV2.4.8 平臺進行開發(fā)。為了驗證算法的正確性與有效性,使用OpenCV庫函數(shù)cvEllipse(CvArr*img,CvPointcenter,CvSizeaxes,doubleangle,doublestart_angle,doubleend_angle,CvScalarcolor,intthickness=1,int line_type=8,int shift=0),輸出一個在像素坐標系下已知參數(shù)的局部二維橢圓,其參數(shù)為:center.x=300;center.y=150;a=150 px;b=100 px;θ=90°;startangle=30°;endangle=230°。
將已知參數(shù)的局部橢圓作為實驗對象一;在對象一中加入毛刺點作為實驗對象二,模擬結構光照射過程中產(chǎn)生的不可剔除的光噪點;在對象一長軸端加入噪聲像素段作為實驗對象三;模擬結構光在照射物體表面形成的連續(xù)誤差像素段。 對三組實驗對象分別用最小二乘法,基于萊特準則的優(yōu)化算法進行橢圓擬合。兩者擬合數(shù)據(jù)結果對比如表1所示,橢圓擬合效果對比如圖3所示。
觀察表1的測試結果,兩種擬合算法均可以對不整橢圓曲線進行擬合,并且兩者均存在一定的擬合誤差。當研究對象是標準曲線時,兩者擬合結果沒有很大差別,且準確率都很高,但當測試對象上存在無法剔除的毛刺點和其他連續(xù)噪聲輪廓時,基于萊特準則的優(yōu)化算法擬合效果優(yōu)于最小二乘法。以表1的數(shù)據(jù)為參考對象,萊特準則優(yōu)化后的算法擬合精度比最小二乘法提高2%。在實驗對象噪聲點數(shù)量增加的過程中,與橢圓理論參數(shù)值相比,基于萊特準則的橢圓擬合算法已達到優(yōu)化效果,驗證了本算法的正確性與有效性。本文研究的待擬合曲線均為不規(guī)則曲線,實驗結果也表明基于萊特準則的橢圓擬合優(yōu)化算法更適用于不規(guī)則曲線。
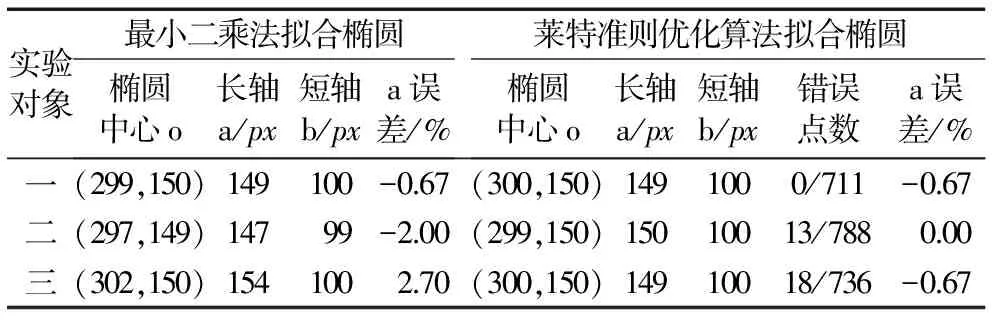
表1 仿真測試數(shù)據(jù)結果

圖3 仿真測試橢圓擬合結果
3.2 仿真測試香煙圓度檢測系統(tǒng)應用
制造業(yè)中的視覺信息反饋能確定產(chǎn)品的形狀、尺寸、姿態(tài)、位置、品質(zhì)和類別是否合格,同時它具有非接觸、全場測量、高精度等優(yōu)點,不會給被檢測物體加以任何干擾限制,因此非常適合檢測在生產(chǎn)線上作業(yè)中的物體[15]。
在我國,煙草行業(yè)一直占有非常重要的地位,其稅收是政府財政收入的重要來源之一。我國由于人口基數(shù)大,煙民多,煙草行業(yè)一直保持著八個世界第一的記錄。香煙生產(chǎn)過程控制嚴格,產(chǎn)品質(zhì)量要求高,其中香煙生產(chǎn)過程中煙條的圓度就是一項需要進行檢測的指標,并且在以往的生產(chǎn)中也沒有很好的在線檢測方式。針對上述缺點,本文設計一套基于視覺信息的無接觸式香煙圓度檢測系統(tǒng),該系統(tǒng)檢測靈敏,檢測結果穩(wěn)定并且精確度高。
大多數(shù)的香煙在卷煙過程中,因卷紙一側涂有膠水,需經(jīng)過高溫熨燙和機械壓頭輕壓使卷紙兩端部分重疊,形成圓筒狀。所以在卷紙過程中,由于機械壓頭對煙條的壓力作用,煙條在生產(chǎn)線上時其橫截面并不是規(guī)則的圓形,而是一個近似于圓形的橢圓,其形狀如圖4所示。
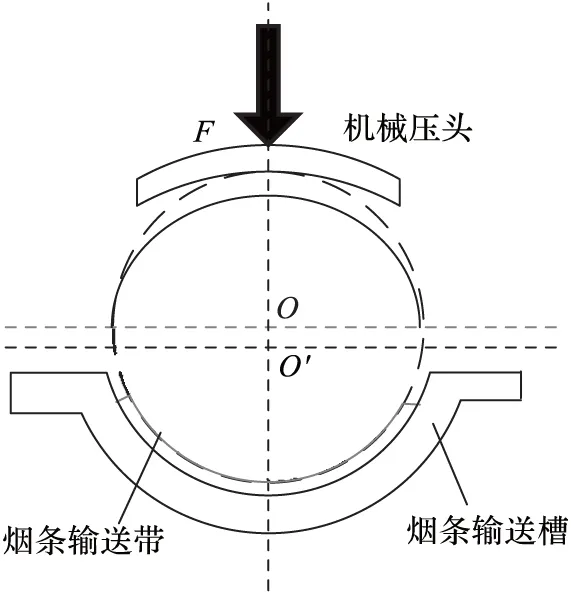
圖4 卷煙煙條的橫截面示意圖
香煙圓度表示香煙橫截面接近理論圓的程度,根據(jù)圓度計算方法可知,如果可以實時檢測到以O′為中心的橢圓的長軸和短軸的差值是否在允許范圍內(nèi),就可判斷機械壓頭是否在有效工作和香煙圓度是否合格。由于此檢測工作是在卷煙完畢后進行,此時煙條并未剪斷,所以相機不能在煙條橫截面處拍攝。為了解決此問題,本文設計一套香煙圓度檢測裝置。
如圖5所示,結構光在煙條縱截面上方一定距離處以固定角度(此處θ=50°)照射在煙條上,形成光斑。工業(yè)相機進行圖像抓取,經(jīng)過圖像去噪等基本處理,得到月牙狀光斑。

圖5 香煙圓度檢測系統(tǒng)示意圖
用萊特準則優(yōu)化算法對月牙光斑進行橢圓擬合,結果如圖6所示,其中橢圓部分是擬合結果,月牙形是擬合曲線,同時得到橢圓長軸a、短軸b。對合格香煙進行多次檢測,完成數(shù)據(jù)標定與誤差補償,標定結束后對生產(chǎn)線上的香煙進行圓度檢測。
由圖7可知:
h=asinθ=asin 50°
(15)
Δh=b-h
(16)
由圓度定義可知,Δh為被檢測煙條的圓度值。通過判斷一個檢測周期內(nèi)Δh的平均值是否在有效區(qū)域內(nèi),可以判斷煙條加工是否合格。
本項目與湖南常德卷煙廠合作,對其生產(chǎn)的芙蓉牌系列香煙進行圓度檢測。以軟藍芙蓉王為例,產(chǎn)品規(guī)格:直徑8mm、長度84mm、圓度0.3mm。項目所用工業(yè)相機型號WY3500,像素2 952×1 944,每秒曝光10次。在檢測過程中,相機拍攝焦距固定,光斑經(jīng)過攝像機采集后映射到圖像中,假設圖像不存在畸變,則像素尺寸與實際尺寸之間存在著固定的比例關系,經(jīng)過測試,比值K=23.10。
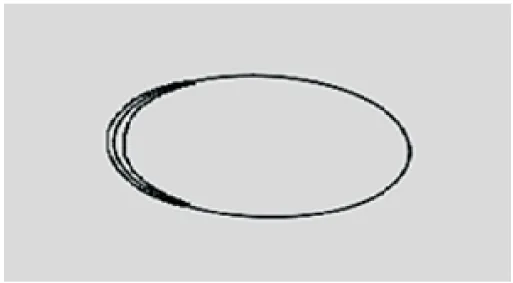
圖6 優(yōu)化算法擬合結果
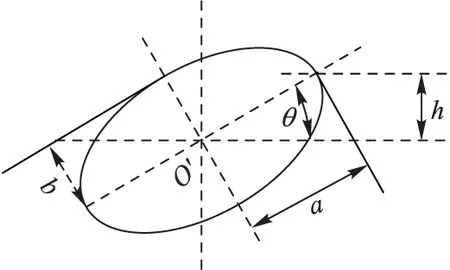
圖7 圓度檢測數(shù)據(jù)分析示意圖
表2為在煙條運行速度為7.58m/s的環(huán)境下,10min內(nèi)對煙條圓度進行檢測的結果,共6 000組數(shù)據(jù),為統(tǒng)計方便,現(xiàn)以每400組數(shù)據(jù)的平均值為一組,共15組數(shù)據(jù),如表2所示。
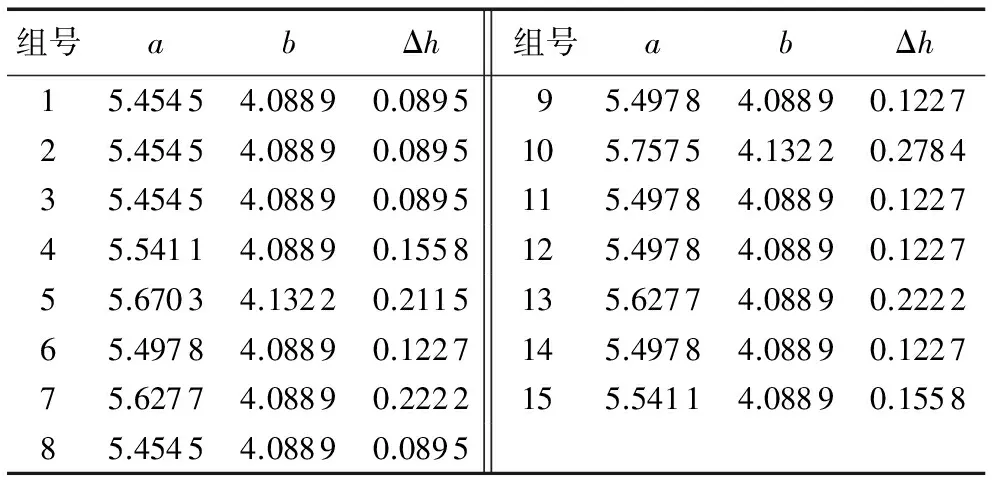
表2 煙條圓度在基于萊特準則優(yōu)化后的視覺檢測系統(tǒng)中測試結果 mm
對表2中得到的15組Δh進行數(shù)據(jù)分析,可知Δh在此10min內(nèi)均在圓度的允許值范圍內(nèi),說明此時間段內(nèi)煙條圓度合格。經(jīng)過多次現(xiàn)場調(diào)試,目前該方法可以較好地檢測香煙圓度。但因為視覺信息對光噪聲和外界震動特別敏感,所以該系統(tǒng)對外界環(huán)境要求較高。在系統(tǒng)測試階段,將用最小二乘法視覺檢測系統(tǒng)檢測合格的香煙煙條與用萊特準則優(yōu)化后的視覺檢系統(tǒng)檢測合格的煙條再次進行線下圓周檢測。各取由最小二乘法檢測香煙圓度合格的煙條和基于萊特準則優(yōu)化后的檢測合格的煙條10根為研究對象,并將每根煙條平均分成10小段,每小段由人工提取5個不同的測量點進行圓周檢測,并求取5個圓周的平均值,與圓度允許范圍作比較判斷其是否合格,最終統(tǒng)計兩個算法下,10根煙條每小段的平均合格率,結果如表3所示。
實際檢測結果表明,最小二乘法檢測系統(tǒng)中出現(xiàn)的香煙合格率要比優(yōu)化過后的視覺檢測系統(tǒng)中出現(xiàn)的合格率低。換言之,在湖南常德卷煙廠項目中,當卷煙煙條以7.58m/s的速度運行,環(huán)境光噪聲和外界震動較小且一定的情況下,優(yōu)化過后的視覺檢測系統(tǒng)在線測量香煙圓周的準確率可以達到95%以上。此優(yōu)化算法和該套香煙圓度視覺檢測系統(tǒng)很好地解決了我國自主香煙參數(shù)檢測設備研發(fā)中遇到的香煙在線檢測精度不高、檢測速度慢等問題。
表3 香煙圓度線下10根煙條的檢測結果 %
Tab.3Offlineroundnessmeasurementresultsof10cigarettes%
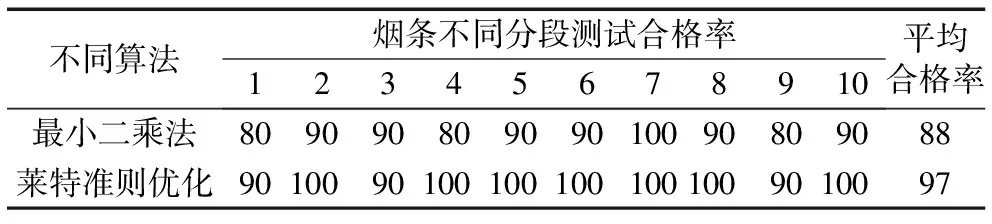
不同算法煙條不同分段測試合格率12345678910平均合格率最小二乘法80909080909010090809088萊特準則優(yōu)化90100901001001001001009010097
4 結語
橢圓擬合算法在圖像處理中具有廣泛的應用,同時也是圖像處理技術中最重要的內(nèi)容之一。現(xiàn)已有很多對橢圓擬合進行優(yōu)化的算法,但大部分算法復雜,擬合周期較長,無法滿足現(xiàn)代工業(yè)中高速檢測的要求。為了改善此情況,本文提出了一種基于萊特準則的橢圓擬合優(yōu)化算法,在最小二乘法的基礎上,用萊特準則剔除誤差點,得到精度更高、運算時間較少的擬合橢圓,并將該算法運用于香煙圓度檢測中,并設計一套基于視覺信息的檢測設備,為我國自主香煙檢測設備提供了一種新思路。
)
[1] 趙光明.機器視覺系統(tǒng)中的橢圓檢測算法研究[D].武漢:華中科技大學,2009:1-5.(ZHAOGM.Studyonellipsedetectionalgorithminmachinevisionsystem[D].Wuhan:HuazhongUniversityofScienceandTechnology, 2009: 1-5.)
[2] 閆蓓,王斌,李媛.基于最小二乘法的橢圓擬合改進算法[J].北京航空航天大學學報,2008,34(3):295-298.(YANB,WANGB,LIY.Optimalellipsefittingmethodbasedonleastsquare[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2008, 34(3): 295-298.)
[3] 韓建棟,楊紅菊,呂乃光.視覺測量中橢圓自動檢測與定位方法[J].計算機工程與應用,2011,47(17):169-171.(HANJD,YANGHJ,LYUNG.Automatedellipsedetectionandlocationmethodon3Dvisualinspection[J].ComputerEngineeringandApplications, 2011, 47(17): 169-171.)
[4]YANGDL,BAIQC,ZHANGYL,etal.EyelocationbasedonHoughtransformanddirectleastsquareellipsefitting[J].JournalofSoftware, 2014, 9(2): 319-323.
[5] 夏菁.橢圓擬合方法的比較研究[D].廣州: 暨南大學,2007:1-7.(XIAJ.Researchonellipsefittingmethod[D].Guangzhou:JinanUniversity, 2007: 1-7.)
[6] 陳海峰,雷華,孔燕波,等.基于最小二乘法的改進的隨機橢圓檢測算法[J].浙江大學學報(工學版),2008,42(8):1360-1364.(CHENHF,LEIH,SUNYB,etal.Animprovedrandomizedalgorithmfordetectingellipsesbasedonleastsquareapproach[J].JournalofZhejiangUniversity(EngineeringScience), 2008, 42(8): 1360-1364.)
[7] 張維光,韓軍,周翔.線結構光多分辨率測量系統(tǒng)數(shù)據(jù)拼接方法[J].儀器儀表學報,2013,34(7):1441-1447.(ZHANGWG,HANJ,ZHOUX.Dataregistrationmethodformultiresolutionmeasurementsystemwithlinestructuredlight[J].ChineseJournalofScientificInstrument, 2013, 34(7): 1441-1447.)
[8]KURTO,ARSLANO.Geometricinterpretationandprecisionanalysisofalgebraicellipsefittingusingleastsquaresmethod[J].ActaGeodaeticaetGeophysicaHungarica, 2012, 47(4): 430-440.
[9] 鄒益民,汪渤.一種基于最小二乘的不完整橢圓擬合算法[J].儀器儀表學報,2006,27(7):808-812.(ZHOUYM,WANGB.Fragmentalellipsefittingbasedonleastsquarealgorithm[J].ChineseJournalofScientificInstrument, 2006, 27(7): 808-812.)
[10]FITZGIBBONA,PILUM,FISHERRB.Directleastsquarefittingofellipses[J].IEEETransactionsonPatternAnalysisandMachineIntelligence, 1999, 21(5): 476-480.
[11] 朱新巖,史忠科.基于殘差特性分析的野值檢測與剔除方法[J].飛行力學,2008,26(6):79-83.(ZHUXY,SHIZK.Outlierdetectionmethodbasedoncharacteristicanalyzingofresidue[J].FlightDynamics, 2008, 26(6): 79-83.)
[12]LAGANIERER.OpenCV2ComputerVisionApplicationProgrammingCookbook[M].Birmingham:PacktPublishing, 2011: 143-164.
[13]PhilippWagner.MachinelearningwithOpenCV2 [EB/OL].[2016-03-10].http://www.bytefish.de.
[14] 章毓晉.圖像處理和分析[M].北京:清華大學出版社,1999:35-36,55-57.(ZHANGYJ.ImageProcessingandAnalysis[M].Beijing:TsinghuaUniversityPress, 1999: 35-36, 55-57.)
[15] 李龍,何明一,李娜.橢圓擬合的圓環(huán)模板攝像機標[J].西安電子科技大學學報(自然科學版),2010,37(6):1148-1154.(LIL,HEMY,LIN.Cameracalibrationbasedonthecircularpatternandellipsefitting[J].JournalofXidianUniversity(NaturalScience), 2010, 37(6): 1148-1154.)
CAO Junli, born in 1991, M.S.candidate.Her research interests include computer image processing, control system design.
LI Jufeng, born in 1956, M.S., associate professor.His research interests include mechanical and electrical integration, control system design.
Improved ellipse fitting algorithm based on Letts criterion
CAO Junli*, LI Jufeng
(SchoolofMechatronicEngineeringandAutomation,ShanghaiUniversity,Shanghai200072,China)
The commonly used Least Square (LS) ellipse fitting algorithm based on minimum algebraic distance is simple and easy to implement, but it has no choice to the sample points, which leads to the fitting results are easily inaccurate due to the error points.According to this case, an improved ellipse fitting algorithm based on Letts criterion was proposed to overcome the shortage of LS algorithm.Firstly, the ellipse was fitted from the fitting curve by using the LS ellipse fitting algorithm based on minimum algebraic distance.Then, the algebraic distance of ellipse fitted by LS algorithm from the point distance on the fitting curve was set as the fitting point set.After the point set was verified to be normal distribution, the points which were greater than |3σ| were determined to be outliers and eliminated by using Letts criterion.Then the steps above were repeated until all points were within the scope of [-3σ,3σ].Finally,thebestfittingellipsewasobtained.ThesimulationexperimentresultsshowthatthefittingerroroftheimprovedalgorithmbasedonLettscriterioniswithin1.0%,anditsfittingaccuracyisimprovedbyatleast2percentagepointscomparedwiththeLSalgorithmunderthesamecondition.Thesimulationresultandthepracticalapplicationinroundnessmeasurementofcigaretteverifytheeffectivenessoftheimprovedalgorithm.
Letts criterion; ellipse fitting; Least Square(LS) algorithm; roundness measurement; vision detection system
2016-06-12;
2016-09-05。
曹俊麗(1991—),女,內(nèi)蒙古烏蘭察布人,碩士研究生,主要研究方向:計算機圖像處理、控制系統(tǒng)設計; 李居峰(1956—),男,上海人,副教授,碩士,主要研究方向:機電一體化、控制系統(tǒng)設計。
1001-9081(2017)01-0273-05DOI:10.11772/j.issn.1001-9081.2017.01.0273
O241.5;TP
A
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46