基于動(dòng)態(tài)降階模型的電力系統(tǒng)非線性電壓預(yù)測控制
2017-04-17 09:33:06蘭曉明王穎趙洪山米增強(qiáng)
電力建設(shè) 2017年3期
蘭曉明,王穎,趙洪山,米增強(qiáng)
(1.華北電力大學(xué)電氣與電子工程學(xué)院,河北省保定市071003; 2.國網(wǎng)河北省電力公司經(jīng)濟(jì)技術(shù)研究院,石家莊市050021)
基于動(dòng)態(tài)降階模型的電力系統(tǒng)非線性電壓預(yù)測控制
蘭曉明1,王穎2,趙洪山1,米增強(qiáng)1
(1.華北電力大學(xué)電氣與電子工程學(xué)院,河北省保定市071003; 2.國網(wǎng)河北省電力公司經(jīng)濟(jì)技術(shù)研究院,石家莊市050021)
傳統(tǒng)電壓控制多采用潮流方程,電壓可能在到達(dá)事故后穩(wěn)定運(yùn)行點(diǎn)前的過渡過程中失穩(wěn),因此基于系統(tǒng)的動(dòng)態(tài)模型進(jìn)行電力系統(tǒng)電壓控制十分必要。該文提出了一種基于動(dòng)態(tài)降階模型的非線性電壓預(yù)測控制方法。為降低優(yōu)化計(jì)算時(shí)間,結(jié)合電力系統(tǒng)的特點(diǎn)對(duì)經(jīng)驗(yàn)Gramian平衡降階方法加以改進(jìn),并應(yīng)用改進(jìn)的經(jīng)驗(yàn)Gramian平衡降階方法降低電力系統(tǒng)非線性動(dòng)態(tài)模型的維數(shù)。為提高模型計(jì)算精度和數(shù)值穩(wěn)定性,提出使用4階收斂的Adams法替代歐拉法進(jìn)行狀態(tài)預(yù)測,建立基于降階模型的多步預(yù)測-滾動(dòng)優(yōu)化模型。此外,在模型求解過程中使用溫啟動(dòng)方法和較小的迭代次數(shù)限值Nmax來減少迭代次數(shù)。以New England 10機(jī)39節(jié)點(diǎn)電力系統(tǒng)對(duì)所提出的方法進(jìn)行驗(yàn)證。結(jié)果表明,所提出的方法能夠提高預(yù)測模型的數(shù)值穩(wěn)定性,極大地降低模型求解時(shí)間,有利于提前響應(yīng)系統(tǒng)中可預(yù)測的動(dòng)態(tài)變化,維持系統(tǒng)電壓穩(wěn)定。
電力系統(tǒng);電壓控制;動(dòng)態(tài)模型;模型預(yù)測控制(MPC);模型降階
0 引言
隨著國民經(jīng)濟(jì)的快速發(fā)展及電網(wǎng)規(guī)模的不斷擴(kuò)大,電網(wǎng)電壓穩(wěn)定問題已成為影響電力系統(tǒng)安全的核心問題之一[1-3]。傳統(tǒng)電壓控制多基于潮流方程。這種控制模式下,只有處于事故后穩(wěn)定運(yùn)行點(diǎn)時(shí),系統(tǒng)才滿足電壓特性約束。若干擾嚴(yán)重,電壓可能會(huì)在到達(dá)事故后穩(wěn)定運(yùn)行點(diǎn)前失去穩(wěn)定。因此,基于動(dòng)態(tài)模型式中為經(jīng)驗(yàn)Gramian平衡降階模型的狀態(tài)量。

根據(jù)樣本數(shù)據(jù)形成有效的經(jīng)驗(yàn)Gramian矩陣是經(jīng)驗(yàn)Gramian平衡降階方法的核心,對(duì)降階效果有著很大影響。結(jié)合研究對(duì)象特點(diǎn)使樣本數(shù)據(jù)盡可能多地包含非線性模型的動(dòng)態(tài)行為,形成更加有效的經(jīng)驗(yàn)Gramian矩陣,對(duì)獲得精度合理的降階模型具有重要意義,是該方法應(yīng)用的研究重點(diǎn)。
然而在經(jīng)驗(yàn)Gramian矩陣定義[14]中,只說明了可以通過對(duì)非線性模型狀態(tài)量和控制量施加不同方向擾動(dòng)的方式進(jìn)行仿真試驗(yàn)以獲取樣本數(shù)據(jù),但并未就各方向擾動(dòng)量的取值方法作詳細(xì)說明。
在非線性電力系統(tǒng)中,各類擾動(dòng)的施加及恢復(fù)往往以改變網(wǎng)絡(luò)結(jié)構(gòu)或負(fù)荷相關(guān)參數(shù)的形式來實(shí)現(xiàn)。例如,短路故障出現(xiàn)、故障隔離、重合閘恢復(fù)供電;負(fù)荷突然增減、負(fù)荷恢復(fù)正常值等。擾動(dòng)施加后,系統(tǒng)在控制器或恒定控制作用下逐漸恢復(fù)穩(wěn)態(tài)。從非線性微分代數(shù)方程的角度看,這是通過改變式(5)中函數(shù)f、g、h來實(shí)現(xiàn)的。但在經(jīng)驗(yàn)Gramian矩陣形成過程中,擾動(dòng)是分別逐一施加在狀態(tài)量和控制量上的,與電力系統(tǒng)施加擾動(dòng)的方法不同。這是由Gramian平衡降階方法考慮降階模型保持原模型動(dòng)態(tài)行為和輸入、輸出特性的要求所決定的。因此,無法將電力系統(tǒng)各類擾動(dòng)的施加方法移植到基于經(jīng)驗(yàn)Gramian平衡降階的擾動(dòng)模擬中。
由上述分析可以看出,要在電力系統(tǒng)中應(yīng)用經(jīng)驗(yàn)Gramian平衡降階方法,擾動(dòng)量的取值必須考慮電力系統(tǒng)狀態(tài)量和控制量的變化特點(diǎn),否則很難從樣本數(shù)據(jù)中提取出系統(tǒng)輸入、輸出動(dòng)態(tài)行為變化的特征。因此,本文針對(duì)這一問題結(jié)合電力系統(tǒng)特點(diǎn)提出一種施加擾動(dòng)的方案。擾動(dòng)施加方案的具體步驟如下詳述。
(1)結(jié)合所研究問題及相關(guān)標(biāo)準(zhǔn),明確降階對(duì)象各類狀態(tài)量和控制量的合理變化范圍,使擾動(dòng)量取值符合電力系統(tǒng)基本運(yùn)行要求。例如,發(fā)電機(jī)勵(lì)磁電壓最大值和最小值、發(fā)電機(jī)頻率的最大值和最小值、電壓設(shè)定值Ugref和Usref的變化幅度等。
(2)加入控制器后,對(duì)降階對(duì)象進(jìn)行各類擾動(dòng)的仿真。例如在線路上設(shè)置各類短路故障等。記錄在每類故障下,各線路的狀態(tài)量和控制量相對(duì)穩(wěn)態(tài)值的正、負(fù)最大偏移量,形成狀態(tài)量、控制量、擾動(dòng)量取值的參考數(shù)據(jù)。經(jīng)驗(yàn)Gramian平衡降階模型需反映出電力系統(tǒng)在各類故障下的動(dòng)態(tài)行為,但由于無法將電力系統(tǒng)各類擾動(dòng)的施加方法移植于經(jīng)驗(yàn)Gramian平衡降階中。因此,采用上述方法能夠在一定程度上結(jié)合電力系統(tǒng)特點(diǎn)豐富樣本數(shù)據(jù)中系統(tǒng)的動(dòng)態(tài)信息,以取得良好的降階效果。
(3)結(jié)合所形成的參考數(shù)據(jù)確定擾動(dòng)量取值。考慮到電力系統(tǒng)狀態(tài)量和控制量的物理意義和變化范圍,以及經(jīng)驗(yàn)Gramian平衡降階方法正、負(fù)兩方向擾動(dòng)值相同的特點(diǎn),擾動(dòng)量取值疊加至對(duì)應(yīng)狀態(tài)量或控制量后,需保證正、負(fù)兩方向的取值不超過對(duì)應(yīng)量的變化范圍。
值得注意的是,由于經(jīng)驗(yàn)Gramian矩陣計(jì)算要求降階對(duì)象最終恢復(fù)至穩(wěn)態(tài),因此在擾動(dòng)仿真過程中,必須確保降階對(duì)象最終能夠恢復(fù)至穩(wěn)態(tài)。若出現(xiàn)降階對(duì)象由于某個(gè)擾動(dòng)值選取過大造成無法恢復(fù)穩(wěn)態(tài)的情況,則需要調(diào)整擾動(dòng)值。
(4)完成對(duì)降階對(duì)象狀態(tài)量和控制量逐一施加正、負(fù)方向擾動(dòng)仿真后,需要確定采樣時(shí)間、采集時(shí)長并采集仿真數(shù)據(jù)。
為增加針對(duì)性,上述經(jīng)驗(yàn)Gramian矩陣形成方案考慮了電力系統(tǒng)的特點(diǎn),有利于形成精度合理的降階模型。由于非線性Gramian平衡降階方法是一種通過樣本數(shù)據(jù)提取系統(tǒng)動(dòng)態(tài)行為特征的經(jīng)驗(yàn)方法,使用者在形成樣本數(shù)據(jù)前需要考慮降階對(duì)象的動(dòng)態(tài)特點(diǎn),在不破壞系統(tǒng)穩(wěn)定的情況下盡可能多地豐富數(shù)據(jù)包含的動(dòng)態(tài)信息,這樣才能獲得滿足精度要求的降階模型。
2 多步預(yù)測-滾動(dòng)優(yōu)化模型
2.1 Adams狀態(tài)預(yù)測
在多步預(yù)測、滾動(dòng)優(yōu)化模型被提出前,1階收斂的歐拉法廣泛應(yīng)用于狀態(tài)預(yù)測。然而,電力系統(tǒng)電壓預(yù)測模型可能會(huì)呈現(xiàn)剛性,歐拉法的收斂性和穩(wěn)定性較差,計(jì)算精度低,因此需采用高階收斂的隱式方法。本文使用一種隱式線性多步法—4階Adams隱式方法進(jìn)行狀態(tài)預(yù)測[15]。式(5)對(duì)應(yīng)的狀態(tài)預(yù)測公式為

式中Th為預(yù)測步長。
相比4階單步收斂方法(如龍格庫塔法等),4階Adams隱式方法能夠使用歷史采樣信息,每步因提高預(yù)測模型精度而增加的計(jì)算量較少,且應(yīng)用式(6)進(jìn)行預(yù)測時(shí),相鄰預(yù)測步間的計(jì)算結(jié)果能夠重復(fù)使用。
2.2滾動(dòng)優(yōu)化
基于式(5),以未來時(shí)間窗內(nèi)電壓與參考軌跡偏移以及系統(tǒng)狀態(tài)量、控制量的最小二乘殘差向量三者之和最小為目標(biāo)函數(shù),考慮其他約束條件構(gòu)建多步預(yù)測、滾動(dòng)優(yōu)化模型。優(yōu)化模型的目標(biāo)函數(shù)為

優(yōu)化模型的約束條件為

式中:p為預(yù)測步數(shù),p=Tp/Th,其中Tp為預(yù)測時(shí)域;為權(quán)重X下的2范數(shù);分別為狀態(tài)量、控制量和代數(shù)量預(yù)測值;分別為狀態(tài)量、控制量和代數(shù)量的上限;分別為狀態(tài)量、控制量和代數(shù)量的下限;Uopf,ref為電壓參考軌跡;模型中的等式約束條件為式(5)基于Adams法進(jìn)行狀態(tài)預(yù)測的表達(dá)形式。
該模型的優(yōu)化變量為

在時(shí)刻t,基于動(dòng)態(tài)模型的非線性電壓預(yù)測控制的過程為:(1)獲取狀態(tài)量、控制量和代數(shù)量的采樣信息;(2)確定當(dāng)前時(shí)刻待解的優(yōu)化問題和優(yōu)化變量的迭代初值;(3)應(yīng)用內(nèi)點(diǎn)數(shù)值算法[16],求解優(yōu)化問題;(4)取最優(yōu)解中的第1步全局最優(yōu)控制值,即電壓設(shè)定值,作為預(yù)測控制器的輸出,實(shí)施閉環(huán)控制。待下一次優(yōu)化計(jì)算的時(shí)刻t+1,重復(fù)上述過程,實(shí)現(xiàn)滾動(dòng)優(yōu)化。
3 溫啟動(dòng)及較少的迭代次數(shù)設(shè)置
在內(nèi)點(diǎn)法求解過程中,本文應(yīng)用溫啟動(dòng)技術(shù)減少內(nèi)點(diǎn)法迭代次數(shù)[17]。設(shè)相鄰兩次實(shí)施預(yù)測控制的時(shí)刻為時(shí)刻t-1和時(shí)刻t。在時(shí)刻t-1,取最優(yōu)解中的第一步全局最優(yōu)控制值作為該時(shí)刻的預(yù)測控制器輸出,中其他優(yōu)化變量的最優(yōu)值可作為下一時(shí)刻優(yōu)化計(jì)算的迭代初值;在時(shí)刻t,在應(yīng)用內(nèi)點(diǎn)法求解該時(shí)刻對(duì)應(yīng)的優(yōu)化問題前,可根據(jù)時(shí)刻t-1的優(yōu)化結(jié)果確定優(yōu)化變量的迭代初值可表示為:
內(nèi)點(diǎn)法迭代終止條件為對(duì)偶間隙足夠小或迭代次數(shù)達(dá)到最大值Nmax。一般情況下,Nmax的設(shè)置目的只是在優(yōu)化模型無法收斂時(shí)防止出現(xiàn)死循環(huán)的情況。其取值為50[15],對(duì)仿真結(jié)果的影響較小。若優(yōu)化模型收斂,對(duì)偶間隙足夠小就可以作為迭代終止條件,幾乎不會(huì)使用到迭代次數(shù)達(dá)到最大值Nmax的迭代終止條件,并且實(shí)際計(jì)算終止時(shí),迭代次數(shù)一般也遠(yuǎn)小于Nmax。
為進(jìn)一步減少內(nèi)點(diǎn)法求解時(shí)間,本文在使用溫啟動(dòng)技術(shù)的基礎(chǔ)上,將Nmax取值范圍壓縮為5~10,使其接近迭代終止條件為對(duì)偶間隙足夠小時(shí)的迭代次數(shù)。上述操作可能會(huì)引發(fā)如下情況:對(duì)偶間隙還未達(dá)到誤差允許范圍,迭代次數(shù)已經(jīng)達(dá)到Nmax,迭代終止。作者認(rèn)為上述情況的迭代結(jié)果也可以用于模型預(yù)測控制中。一方面,溫啟動(dòng)技術(shù)保證了所有優(yōu)化變量初值均滿足約束條件,即便迭代過程因迭代次數(shù)達(dá)到Nmax而終止,此時(shí)優(yōu)化變量的取值也滿足約束條件,且與最優(yōu)解相差不大;另一方面,時(shí)刻t優(yōu)化計(jì)算完成后,MPC僅取結(jié)果中的第1步控制量的值ut實(shí)施閉環(huán)控制,其多步預(yù)測-滾動(dòng)優(yōu)化技術(shù)能夠保證ut不會(huì)對(duì)系統(tǒng)未來動(dòng)態(tài)行為產(chǎn)生不利影響。因此,在溫啟動(dòng)技術(shù)的基礎(chǔ)上,選取對(duì)偶間隙足夠小或較小的Nmax作為迭代終止條件是合理且可行的。
4 仿真分析
New England 10機(jī)39節(jié)點(diǎn)系統(tǒng)包含10臺(tái)發(fā)電機(jī),46條線路,如圖1所示。以New England 10機(jī)39節(jié)點(diǎn)系統(tǒng)為算例進(jìn)行仿真分析,對(duì)所提出方法的有效性進(jìn)行驗(yàn)證。為考慮負(fù)荷自恢復(fù)及電動(dòng)機(jī)的動(dòng)態(tài)特性,采用如下負(fù)荷模型:節(jié)點(diǎn)3、4、7、8、18、20、21、26、27接指數(shù)恢復(fù)型負(fù)荷模型;其他每個(gè)負(fù)荷節(jié)點(diǎn)均接40%的恒阻抗和60%的感應(yīng)電動(dòng)機(jī)負(fù)荷模型。在母線12、20、24、27處裝設(shè)容量依次為100 MV·A、100 MV·A、150 MV·A、150 MV·A的SVC。最終所形成系統(tǒng)的動(dòng)態(tài)模型階數(shù)為90階。

圖1 NewEngland10機(jī)39節(jié)點(diǎn)系統(tǒng)Fig.1 NewEngland10-generator39-bustestsystem
4.1模型降階分析
分別采用以下2種方案對(duì)系統(tǒng)動(dòng)態(tài)模型進(jìn)行降階分析:方案1采用文中1.2節(jié)所提的擾動(dòng)施加方案;方案2中各狀態(tài)量擾動(dòng)值為所對(duì)應(yīng)初始穩(wěn)態(tài)值的1%。
上述2種方案在仿真采樣過程中,系統(tǒng)均能夠維持穩(wěn)定。方案1、2所對(duì)應(yīng)平衡系統(tǒng)的前30個(gè)Hankel奇異值柱狀圖分別如圖2、3所示。由于奇異值幅值過小,奇異值序號(hào)大于30的情形未在圖中顯示。

圖2 方案1下的Hankel奇異值Fig.2 Hankelsingularvaluesunderscheme1

圖3 方案2下的Hankel奇異值Fig.3 Hankelsingularvaluesunderscheme2
由圖2、3可見,方案1中奇異值衰減明顯,且衰減幅度較大,奇異值分布合理。從奇異值分布上看,取相同的輸出誤差上界,方案1降階程度更大;在相同降階階數(shù)下,方案1降階效果更好。圖2中,前5個(gè)奇異值集合所含能量占總能量的85.62%;前14個(gè)奇異值集合所含能量占總能量的99.14%。考慮模型階數(shù)及精度兩方面因素,可將90階的電壓預(yù)測模型降為14階模型,并基于降階模型研究預(yù)測控制問題。
4.2預(yù)測控制分析
4.2.1 控制性能分析
仿真場景設(shè)置如下:系統(tǒng)在0~5.1 s內(nèi)正常運(yùn)行;t=5.1 s時(shí),所有負(fù)荷節(jié)點(diǎn)的負(fù)荷以10%/s的速度持續(xù)指數(shù)增長;在t=15 s時(shí),所有負(fù)荷停止增加; t=30 s時(shí),系統(tǒng)仿真結(jié)束。歐拉法的狀態(tài)預(yù)測下,基于90階模型的電壓預(yù)測控制仿真曲線如圖4所示; Adams法狀態(tài)預(yù)測下,基于90階模型的電壓預(yù)測控制的仿真曲線如圖5所示;Adams狀態(tài)預(yù)測下,基于14階的降階模型的電壓預(yù)測控制仿真曲線如圖6所示。上述仿真中,所用電壓預(yù)測控制方法的參數(shù)如下:Th=2 s,p=4,TC=8 s,其中TC為控制時(shí)域。
如圖4所示,在傳統(tǒng)電壓預(yù)測控制下,在負(fù)荷開始增長的一段時(shí)間內(nèi),由于發(fā)電機(jī)和負(fù)荷電壓設(shè)定值得到及時(shí)調(diào)整,母線電壓的下降程度均在可接受范圍內(nèi)。但歐拉法狀態(tài)預(yù)測精度低,使得發(fā)電機(jī)和負(fù)荷電壓設(shè)定值的調(diào)整不夠精細(xì),負(fù)荷及發(fā)電機(jī)母線電壓波動(dòng)明顯。有部分發(fā)電機(jī)和負(fù)荷母線電壓下降嚴(yán)重。
如圖5所示,基于動(dòng)態(tài)模型的電壓預(yù)測控制能夠根據(jù)系統(tǒng)未來時(shí)間窗內(nèi)的動(dòng)態(tài)行為變化趨勢,及時(shí)調(diào)整發(fā)電機(jī)和負(fù)荷的電壓設(shè)定值,進(jìn)而實(shí)現(xiàn)全局電壓的最優(yōu)控制。相比圖4,在34號(hào)機(jī)組勵(lì)磁電壓到達(dá)上限之前,電壓預(yù)測控制器及時(shí)上調(diào)相鄰機(jī)組(33號(hào)等機(jī)組)的電壓設(shè)定值來支援34號(hào)機(jī)組,故其母線電壓并未出現(xiàn)持續(xù)迅速下降。此外,其他發(fā)電機(jī)和負(fù)荷母線電壓波動(dòng)及其穩(wěn)定值均在合理范圍內(nèi),電壓恢復(fù)水平高于圖4。
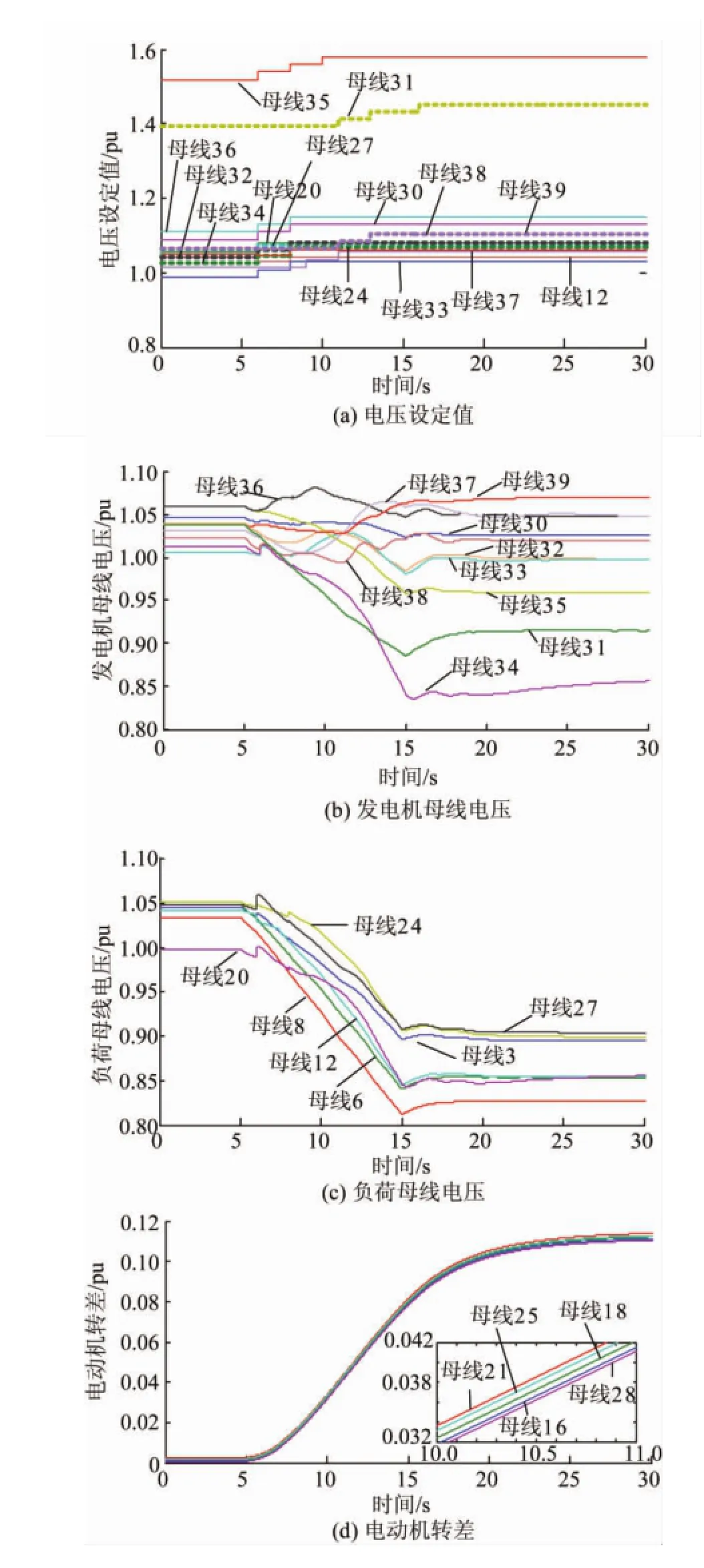
圖4 歐拉狀態(tài)預(yù)測下基于90階模型的電壓預(yù)測控制的仿真曲線Fig.4 Simulatedcurveswithvoltagepredictivecontrol basedon90-ordermodelunderEulerstateprediction
基于動(dòng)態(tài)模型的電壓非線性預(yù)測控制方法能夠提前響應(yīng)系統(tǒng)可預(yù)見的變化,精細(xì)化地調(diào)節(jié)電壓水平,保證電網(wǎng)安全、穩(wěn)定運(yùn)行。相比基于歐拉法的狀態(tài)預(yù)測,Adams狀態(tài)預(yù)測提高了模型計(jì)算精度。
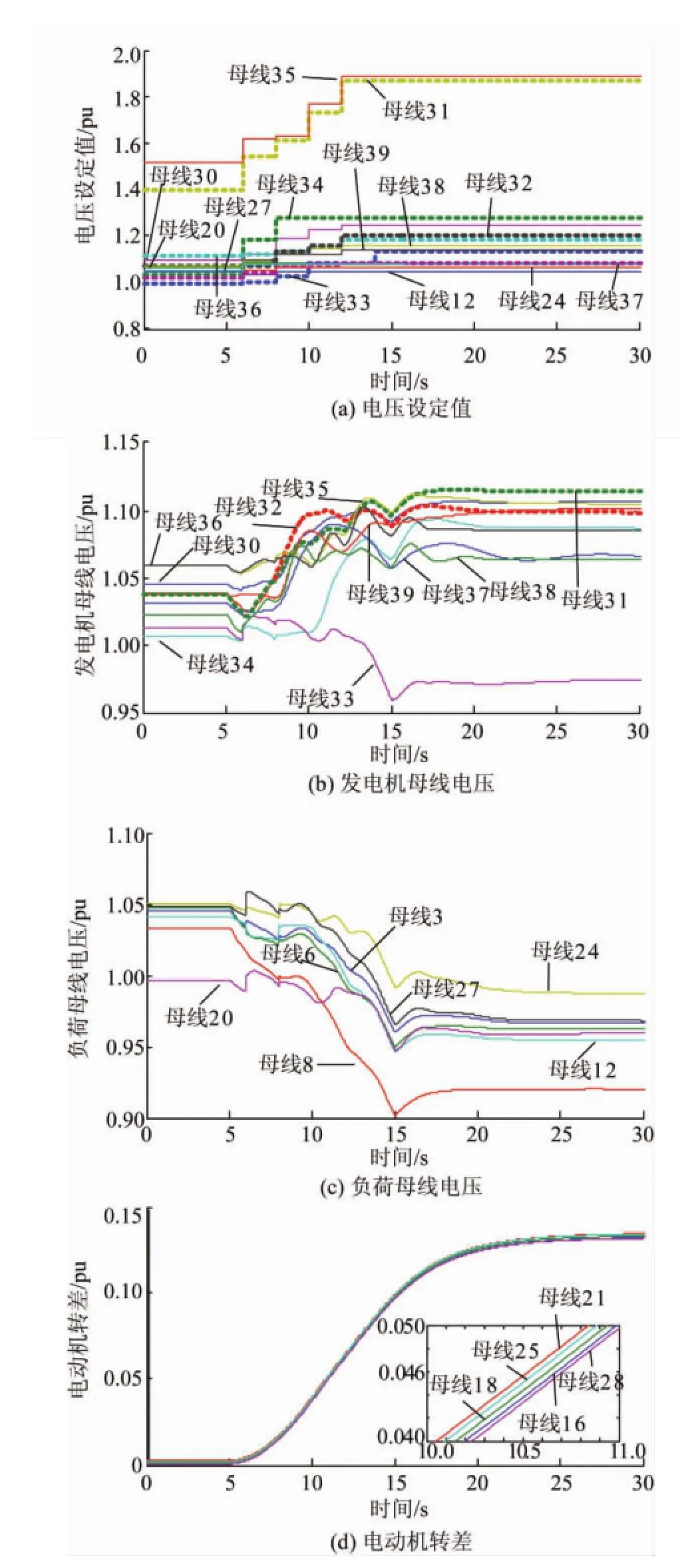
圖5 Adams狀態(tài)預(yù)測下基于90階模型的電壓預(yù)測控制的仿真曲線Fig.5 Simulatedcurveswithvoltagepredictivecontrol basedon90-ordermodelunderAdamsstateprediction
如圖6所示,在基于14階降階模型的電壓預(yù)測控制下,系統(tǒng)各母線電壓最終恢復(fù)至穩(wěn)定狀態(tài),其波動(dòng)過程及穩(wěn)定值均在合理范圍內(nèi)。雖然與基于原模型的電壓預(yù)測控制效果存在一定的差異,但兩者是非常接近的。由此可見,經(jīng)驗(yàn)Gramian降階方法能夠保留原模型的穩(wěn)定性和全局動(dòng)態(tài)行為,所提出的基于降階模型的電壓非線性預(yù)測控制是可行的。
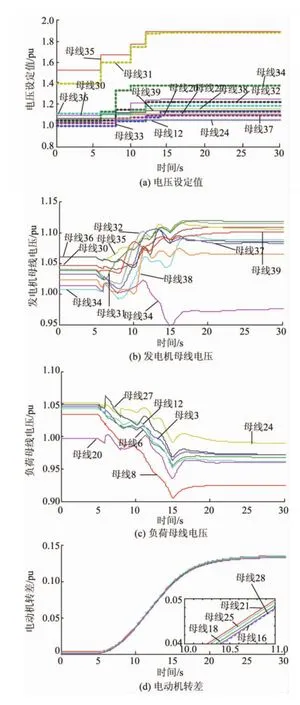
圖6 Adams狀態(tài)預(yù)測下基于14階降階模型的電壓預(yù)測控制仿真曲線Fig.6 Simulatedcurveswithvoltagepredictivecontrol basedon14-orderreductionmodelunder Adamsstateprediction
4.2.2 求解時(shí)間分析
在所設(shè)置場景下,基于原90階模型與基于14階降階模型的電壓預(yù)測控制優(yōu)化問題的復(fù)雜度及求解時(shí)間分別見表1、2。采用表1、2中參數(shù)的預(yù)測控制下,系統(tǒng)各母線電壓能夠維持穩(wěn)定,母線電壓波動(dòng)過程及穩(wěn)定值均在合理范圍內(nèi)。
設(shè)O為優(yōu)化問題的復(fù)雜度。O的計(jì)算式為

式中:O為優(yōu)化問題的復(fù)雜度;mp,i為預(yù)測步數(shù)為p,模型階數(shù)為i時(shí)的優(yōu)化問題所含約束條件個(gè)數(shù);m5,90為預(yù)測步數(shù)為5時(shí),90階模型優(yōu)化問題所含約束條件個(gè)數(shù)。
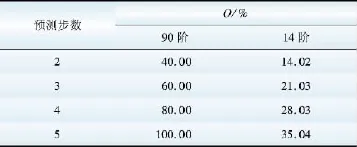
表1 優(yōu)化問題的復(fù)雜度Table1 Complexityofoptimizationproblem
設(shè)η為選定的預(yù)測步數(shù)下,基于14階模型相對(duì)于基于90階模型進(jìn)行優(yōu)化問題求解所節(jié)省時(shí)間與基于90階模型求解時(shí)間之比,見表2所示。

表2 優(yōu)化問題的求解時(shí)間Table2 Solving-timeofoptimizationproblem
不難看出,隨著預(yù)測步數(shù)的增加,電壓預(yù)測控制優(yōu)化問題的復(fù)雜度和求解時(shí)間逐漸增加。基于14階降階模型的電壓預(yù)測控制能夠降低優(yōu)化問題的復(fù)雜度,相比原預(yù)測模型所對(duì)應(yīng)優(yōu)化問題,求解時(shí)間降幅可達(dá)40%以上。因此,基于動(dòng)態(tài)降階模型的電力系統(tǒng)非線性電壓預(yù)測控制極大地提高了優(yōu)化問題的求解效率,同時(shí)具有低預(yù)測步數(shù)的計(jì)算復(fù)雜度和高預(yù)測步數(shù)的控制性能。
5 結(jié)論
本文提出一種基于動(dòng)態(tài)降階模型的電力系統(tǒng)非線性電壓預(yù)測控制方法。結(jié)合電力系統(tǒng)的特點(diǎn)改進(jìn)經(jīng)驗(yàn)Gramian平衡降階方法,并應(yīng)用改進(jìn)的經(jīng)驗(yàn)Gramian平衡降階方法降低電力系統(tǒng)非線性動(dòng)態(tài)模型的維數(shù)。使用4階收斂的Adams法提高模型計(jì)算精度和數(shù)值穩(wěn)定性。采用內(nèi)點(diǎn)法求解多步預(yù)測-滾動(dòng)優(yōu)化問題,使用溫啟動(dòng)法和較小的迭代次數(shù)限值Nmax減少優(yōu)化計(jì)算迭代次數(shù)。通過算例仿真驗(yàn)證了所提出方法的可行性和有效性。
[1]周雙喜,朱凌志,郭錫玖.電力系統(tǒng)電壓穩(wěn)定性及其控制[M].北京:中國電力出版社,2003,127-132.
[2]黃小慶,曹陽,吳衛(wèi)良,等.考慮電壓暫降指標(biāo)的電壓協(xié)調(diào)控制方法研究[J].電力系統(tǒng)保護(hù)與控制,2015,43(22):147-154.HUANG Xiaoqing,CAO Yang,WU Weiliang,et al.Research on voltage coordination control method considering voltage sag index[J].Power System Protection and Control,2015,43(22):147-154
[3]林舜江,劉明波,周欣,等.暫態(tài)電壓安全緊急切負(fù)荷控制優(yōu)化研究[J].電力系統(tǒng)保護(hù)與控制,2010,38(11):18-24.LIN Shunjiang,LIU Mingbo,ZHOU Xin,et al.Emergency load shedding control optimization for transient voltage security[J].Power System Protection and Control,2010,38(11):18-24.
[4]ALLGOWER F,F(xiàn)INDEISE R,NAGY Z K.Nonlinear model predictive control from theory to application[J].Journalof the Chinese Institute of Chemical Engineers,2004,35(3):299-315.
[5]周念成,付鵬武,王強(qiáng)鋼,等.基于模型預(yù)測控制的兩區(qū)域互聯(lián)電網(wǎng)AGC系統(tǒng)研究[J].電力系統(tǒng)保護(hù)與控制,2012,40(22): 46-51.ZHOU Niancheng,F(xiàn)U Pengwu,WANG Qianggang,et al.Research on AGC of two area interconnected power system based on MPC[J].Power System Protection and Control,2012,40(22):46-51.
[6]楊冬鋒,周蘇荃,魏劍嘯,等.基于MPC的超短期優(yōu)化調(diào)度策略研究[J].電力系統(tǒng)保護(hù)與控制,2015,43(11):46-51.YANG Dongfeng,ZHOU Suquan,WEI Jianxiao,et al.Ultra-short term optimal dispatch method based on MPC[J].Power System Protection and Control,2015,43(11):46-51.
[7]代高富,符金偉,周勝,等.基于模型預(yù)測控制的MMC-HVDC控制策略研究[J].電力系統(tǒng)保護(hù)與控制,2016,44(10):10-16.DAI Gaofu,F(xiàn)U Jinwei,ZHOU Sheng,etal.Study of control strategy for MMC-HVDC system based on model predictive control[J].Power System Protection and Control,2016,44(10):10-16.
[8]劉水平,劉明波,謝敏,等.應(yīng)用MPC和軌跡靈敏度技術(shù)實(shí)現(xiàn)最優(yōu)協(xié)調(diào)電壓控制[J].電力系統(tǒng)保護(hù)與控制,2011,39(1):1-6,14.LIU Shuiping,LIU Mingbo,XIE Min,et al.Optimal coordinated voltage control using MPC and trajectory sensitivity technique[J].Power System Protection and Control,2011,39(1):1-6,14.
[9]張聚,陳圓,丁靖,等.電力系統(tǒng)電壓崩潰的顯式模型預(yù)測控制[J].電力系統(tǒng)保護(hù)與控制,2012,40(16):8-14. ZHANG Ju,CHEN Yuan,DING Jing,et al.Explicit model predictive control of voltage collapse in power systems[J].Power System Protection and Control,2012,40(16):8-14.
[10]王爽,劉明波,郭挺,等.應(yīng)用Radau排列和移動(dòng)區(qū)間技術(shù)實(shí)現(xiàn)模型預(yù)測緊急電壓控制[J].電力系統(tǒng)保護(hù)與控制,2011,39 (22):24-29,39.WANG Shuang,LIU Mingbo,GUO Ting,et al.Model predictive emergency voltage control using Radau collocation and moving finite elements technique[J].Power System Protection and Control,2011,39(22):24-29,39.
[11]黃義隆,謝敏,劉明波.基于修正軌跡靈敏度的模型預(yù)測長期電壓穩(wěn)定控制[J].電力系統(tǒng)自動(dòng)化,2012,36(3):28-33.HUANG Yilong,XIE Min,LIU Mingbo.Modelpredictive controlfor long-term voltage stability based on corrected trajectory sensitives[J].Automation of Electric Power Systems,2012,36(3):28-33.
[12]倪以信,陳壽孫,張寶霖.動(dòng)態(tài)電力系統(tǒng)的理論和分析[M].北京:清華大學(xué)出版社,2002:361-363.
[13]王錫凡,方萬良,杜正春.現(xiàn)代電力系統(tǒng)分析[M].北京:科學(xué)出版社,2003:120-123.
[14]趙洪山,蘭曉明,周雪青.基于平衡降階模型的多機(jī)電力系統(tǒng)非線性勵(lì)磁預(yù)測控制[J].中國電機(jī)工程學(xué)報(bào),2013,33(22): 61-67.ZHAO Hongshan,LAN Xiaoming,ZHOU Xueqing.Nonlinear excitation predictive control of multi-machine power systems based on balanced reduced model[J].Proceedings of the CSEE,2013,33 (22):61-67.
[15]李慶楊.?dāng)?shù)值分析[M].北京:清華大學(xué)出版社,2008,279-313.
[16]趙洪山,范曉丹,顧雪平.原對(duì)偶非線性變尺度優(yōu)化潮流算法[J].中國電機(jī)工程學(xué)報(bào),2009,29(31):47-52.ZHAO Hongshan,F(xiàn)AN Xiaodan, GU Xueping. Primal-dual nonlinear rescaling method for optimalpower flow[J].Proceedings of the CSEE,2009,29(31):47-52.
[17]YANG W,STEPHEN B.Fast model predictive control using online optimization[J].IEEE Transactions on Control Systems Technology, 2010,18(2):267-278.
(編輯 郭文瑞)
Nonlinear Voltage Prediction Control of Power System Based on Dynamic Reduced Model
LAN Xiaoming1,WANG Ying2,ZHAO Hongshan1,MI Zengqiang1
(1.School of Electrical and Electronics Engineering North China Electric Power University,Baoding 071003,Hebei Province,China;2.Economic and Technology Research Institute,State Grid Electric Power Company of Hebei Province,Shijiazhuang 050021,China)
Due to the use of power flow equation in tradition voltage control,the voltages may lose its stability in the transition process form the failure to the stable operating point.Itis necessary to consider dynamic modelof power system in voltage study.This paper presents a nonlinear voltage predictive control method based on dynamic reduced model.In order to decrease the optimal calculating time,the improved empirical Gramian balance reduction method based on the features of power system is applied to reduce the order of power system nonlinear dynamic model.In order to improve the accuracy and numerical stability of predictive model,this paper uses a 4-order convergent Adams method instead of Euler method to predictive state values,and develops a multi-step prediction and rolling optimization model based on reduced model.In addition,the warm start technique and a small iterative times limit Nmaxare used to decrease the iterative times in the solving process.The New England 10-generator and 39-bus power system is simulated to test the performance of the proposed method.The simulation results show that this method can not only increase the predictive model numerical stability and decrease the optimal-timing greatly,but also respond the predictable dynamic change of the system in advance to keep voltage stable.
power system;voltage control;dynamic model;model predictive control(MPC);model reduction
TM 74
A
1000-7229(2017)03-0034-08
10.3969/j.issn.1000-7229.2017.03.005
2016-10-11
蘭曉明(1987),男,博士研究生,本文通信作者,主要從事電力系統(tǒng)動(dòng)態(tài)模型以及非線性預(yù)測控制算法等方面的研究工作;
王穎(1975),女,碩士,高級(jí)工程師,主要從事電網(wǎng)規(guī)劃等方面的研究工作;
趙洪山(1965),男,教授,主要從事電力系統(tǒng)混雜建模、動(dòng)態(tài)分析與控制以及電力系統(tǒng)優(yōu)化計(jì)算等方面的研究工作;
米增強(qiáng)(1960),男,教授,博士生導(dǎo)師,主要從事風(fēng)電場建模與接入系統(tǒng)分析、風(fēng)電場監(jiān)控系統(tǒng)、風(fēng)電場發(fā)電功率預(yù)測等方面的研究工作。
國家自然科學(xué)基金項(xiàng)目(51077053)
Project supported by National Natural Science Foundation of China (51077053)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
