AVR單片機的全方位雷達輔助行車系統設計
2017-04-25 06:04:27倪建華
單片機與嵌入式系統應用 2017年4期
倪建華
(江蘇卡威工業集團有限公司,丹陽 212323)
AVR單片機的全方位雷達輔助行車系統設計
倪建華
(江蘇卡威工業集團有限公司,丹陽 212323)
針對4探頭倒車雷達常存在視覺盲區造成停車困難的問題,本文研究一種包含8探頭的全方位雷達輔助行車系統。8個探頭分別布置在車頭和車尾,在車輛前進和倒車狀態下分別啟用不同位置的雷達,通過AVR單片機控制電路模塊、超聲波測距模塊、液晶顯示模塊、蜂鳴器報警模塊等實現多路障礙物的探測、距離顯示和聲音報警功能,以幫助駕駛員判斷車輛距離障礙物的遠近,全面了解車輛周圍情況。
汽車雷達;AVR單片機;中斷處理;輔助行車系統
引 言
隨著中國經濟的高速發展,汽車普及率越來越高,在汽車數量快速增長的同時也帶來了一些問題,如空間狹小條件下的泊車問題、緩慢行車條件下的跟車安全問題等。雷達輔助行車系統得到了較多的研究和關注[1-3],目前常用的輔助倒車系統為4探頭倒車雷達,該系統在一定程度上有效避免了倒車或泊車時與車輛后方障礙物的碰撞問題。參考文獻[4]研究了一種二維倒車雷達系統,能同時辨識出車輛后方水平障礙物和地面障礙物,但在空間比較狹小時,不僅要考慮車輛后方的障礙物,還要考慮車頭位置的障礙物,尤其是駕駛員右前方位置的障礙物;另一方面,汽車數量的大幅增加造成了早晚高峰時的道路擁堵,汽車的行駛狀態常為緩慢行車和跟車,此時,有必要增加車輛的前置雷達系統以提高行車安全。
因此,本文針對目前倒車雷達系統存在的問題,研究一種包含8探頭的全方位雷達輔助行車系統,當系統探測到車輛和周圍障礙物之間的距離小于設定值時,蜂鳴器報警,并將隨著距離的變化發出不同頻率的報警聲。
1 系統總體設計
本文研究的全方位雷達輔助行車系統包括8個探頭,探頭分別布置在車頭和車尾位置,當車輛緩慢跟車、剎車、倒車時,將分別啟動不同位置的探頭,圖1為車輛緩慢跟車和剎車時雷達工作示意圖,此時位于車頭的4個探頭開始工作,駕駛員可自主選擇是否啟用圖1所示的車輛跟車和剎車時的雷達探測功能;圖2為車輛倒車時雷達工作示意圖,當汽車檔位處于倒檔時,位于車頭的2個探頭和車尾的4個探頭開始工作,同時探測車輛前后方的障礙物。
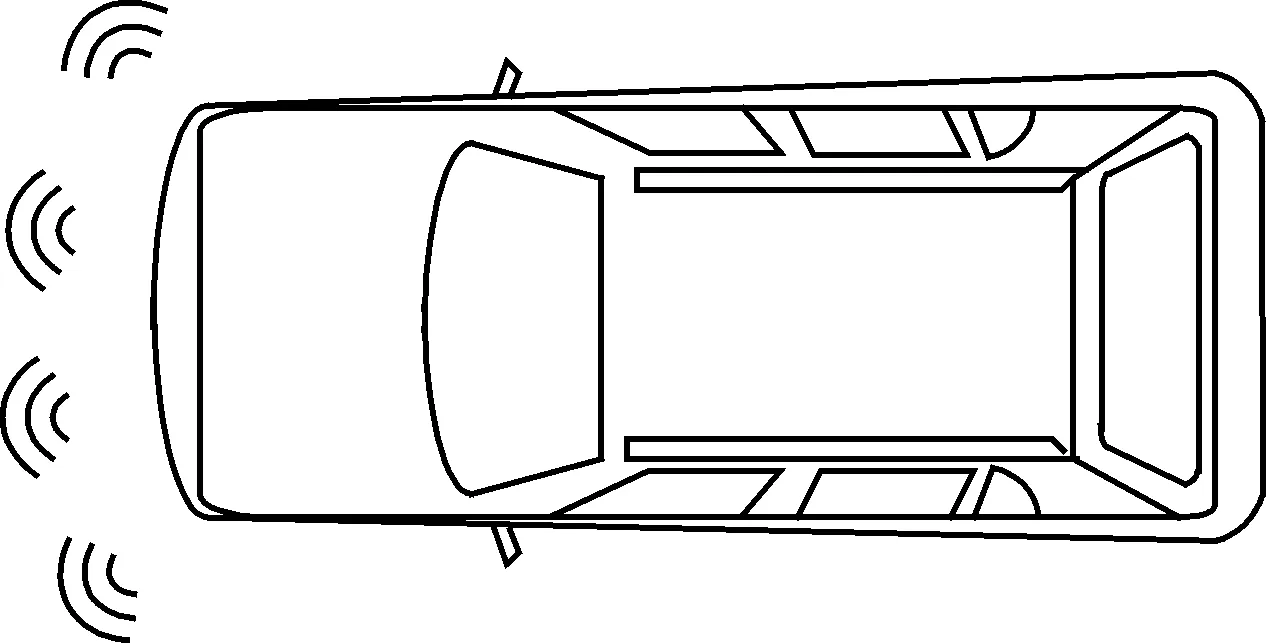
圖1 車輛跟車和剎車時雷達工作示意圖
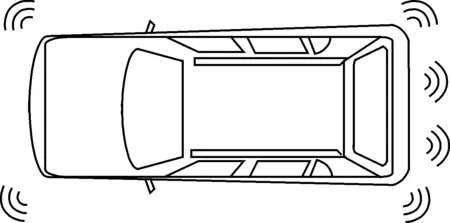
圖2 車輛倒車時雷達工作示意圖
系統由AVR單片機控制電路模塊、超聲波測距模塊、液晶顯示模塊、蜂鳴器報警模塊等組成。本系統使用超聲波測距模塊完成系統設計,可降低系統電路設計難度,縮短設計時間,且獲得較高的硬件穩定性。因此需要搭載多路超聲波測距模塊,采用信號復用器,不僅可滿足應用需求,也可為以后功能擴展預留空間;采用外部中斷來捕捉信號,這樣可節約單片機資源,響應快速準確,提高測距的精度。
2 硬件電路設計
2.1 AVR單片機控制電路模塊
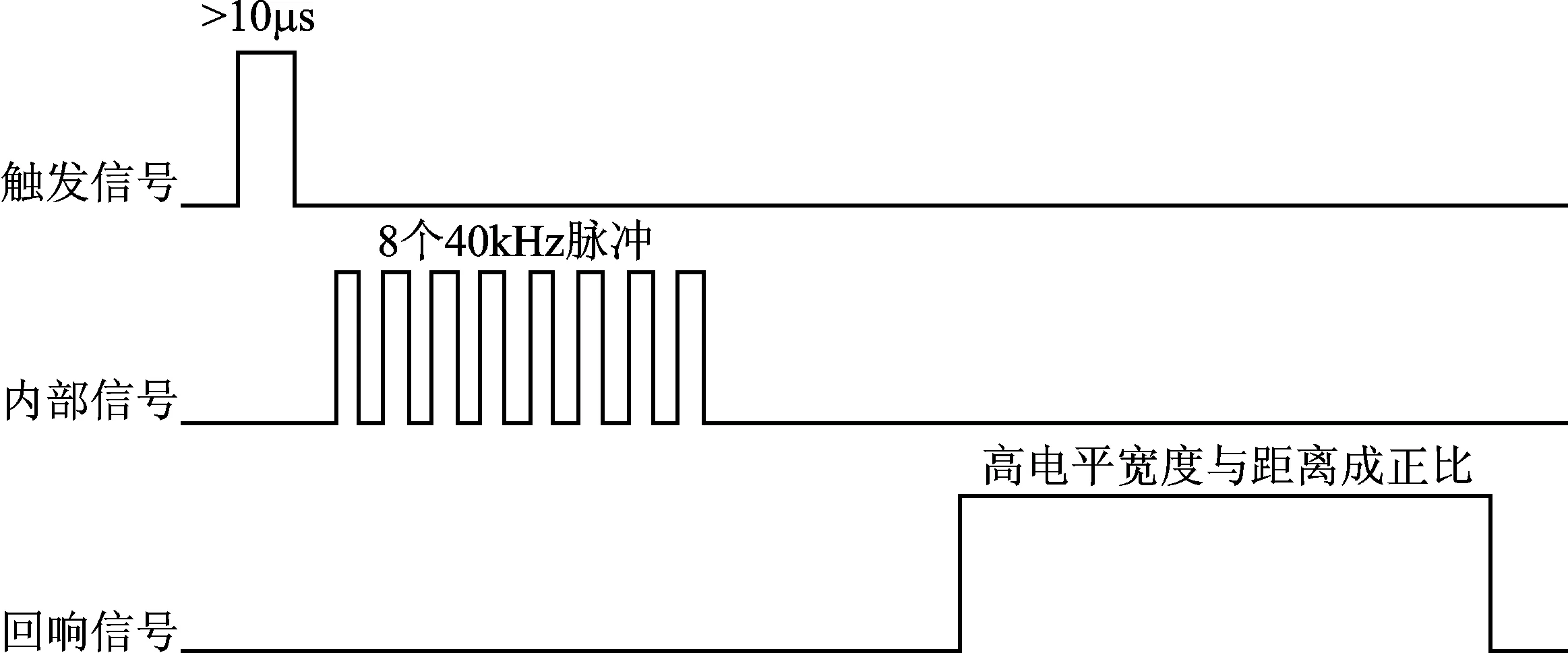
圖5 HCSR04時序圖
控制電路模塊使用高性能、低功耗的8位AVR單片機,可以滿足信號采集、計算、顯示及聲音報警等各項功能。Atmel公司推出的AVR單片機具有先進的RISC結構,大多數指令執行周期為單個時鐘周期,當工作于16 MHz時,其性能高達16 MIPS。ATmega16單片機具有16 KB的片內可編程Flash、512字節的片內EEPROM、1 KB的片內SRAM,包含2個具有獨立預分頻器和比較器功能的8位定時器/計數器,以及1個具有獨立預分頻器、比較器和捕捉器功能的16位定時器/計數器,能滿足該行車輔助系統的功能需求。該單片機具有JTAG接口,可以通過JTAG接口對片內Flash、EEPROM、熔絲位和鎖定位進行編程。單片機控制電路模塊如圖3所示。
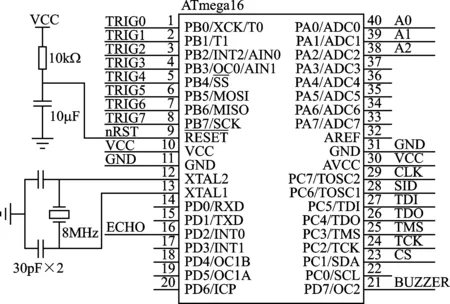
圖3 ATmega16控制電路
2.2 超聲波測距模塊
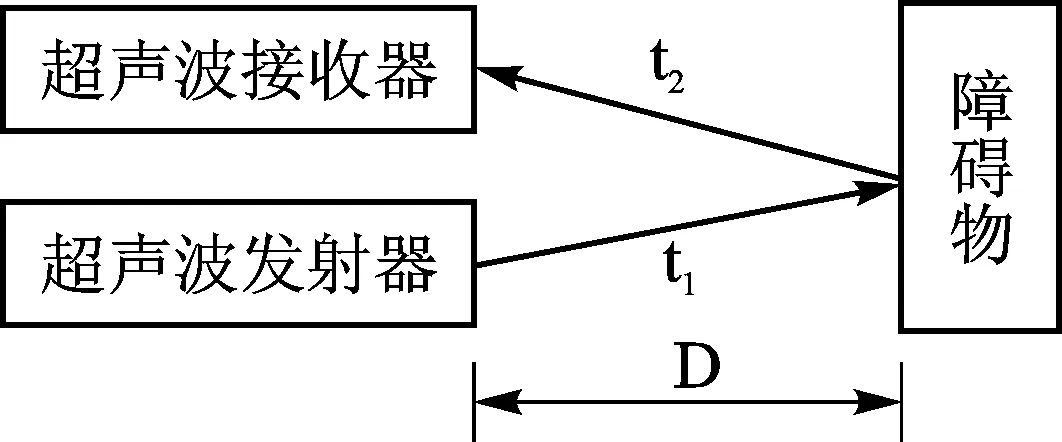
圖4 超聲波測距計算示意圖
超聲波測距是基于超聲脈沖回波渡越時間算法來實現的[5]。如圖4所示,假設超聲脈沖在空氣中的傳播速度為C,從超聲脈沖發出到檢測到回波信號之間的時間為T=t1+t2,則超聲波測距模塊與被探測障礙物之間的距離為D=CT/2。
本文選用HC-SR04超聲波測距模塊完成系統設計,該模塊包括超聲波發射器、接收器和控制器。測距模塊工作電壓為4.5~5.5 V,最大功耗為20 mA,諧振頻率為40 kHz,測距范圍為20~4 000 mm,測量精度為4%。該模塊通過4針接口與外部控制電路連接,其中VCC和GND為電源輸入接口,Trig和Echo為信號控制接口。圖5為HC-SR04控制時序圖,HC-SR04模塊收到10 μs的高電平信號后,模塊內部會產生8個40 kHz的脈沖。在此之后,超聲波發射器發出超聲波信號,同時回響輸出信號變為高電平。當發出的超聲波信號遇到障礙物反射回來,被超聲波接收模塊接收到后,回響輸出信號變為低電平。回響信號的高電平寬度和障礙物距離成正比。
2.3 液晶顯示模塊
液晶顯示模塊可實時顯示車輛與周圍障礙物之間的距離,本系統使用128×64點陣顯示的液晶模塊JCM12864M,可顯示4行漢字,每行8個,顯示內容豐富。該液晶模塊可以使用并行通信方式,也可以使用串行通信方式。本文中選用串行通信方式,該通信方式只需要占用單片機的3個I/O口即可實現,如圖6所示。
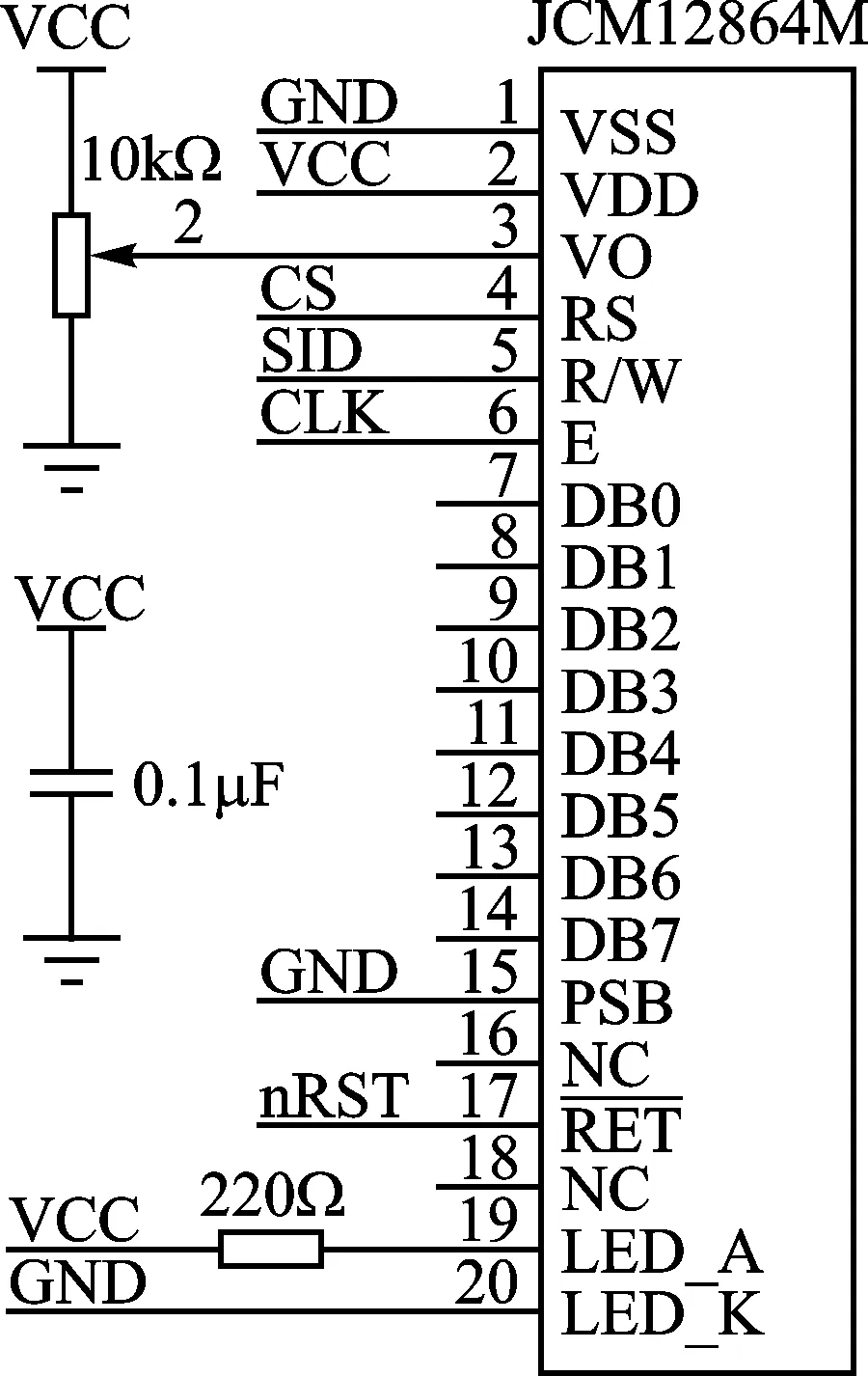
圖6 點陣液晶模塊控制電路
2.4 蜂鳴器報警模塊
當車輛與周圍障礙物之間的距離小于一定值時,蜂鳴器報警。本系統選用的是無源蜂鳴器,無源蜂鳴器需要使用單片機的1路PWM輸出引腳,占用1個定時器/計數器資源,與有源蜂鳴器相比,無源蜂鳴器可以發出更豐富的聲音信息。無源蜂鳴器所需的驅動電流較大,單片機I/O口不能直接進行驅動,需要通過1個三極管進行驅動電流放大,其控制電路如圖7所示。無源蜂鳴器通過輸入電壓方波的波形頻率來控制發聲的音調,通過電壓方波的占空比來控制發聲的音量,在實際探測中,蜂鳴器將根據距離信息的變化發出不同頻率的聲音以提醒駕駛員掌握車輛周圍障礙物的情況。
2.5 雷達輔助行車系統
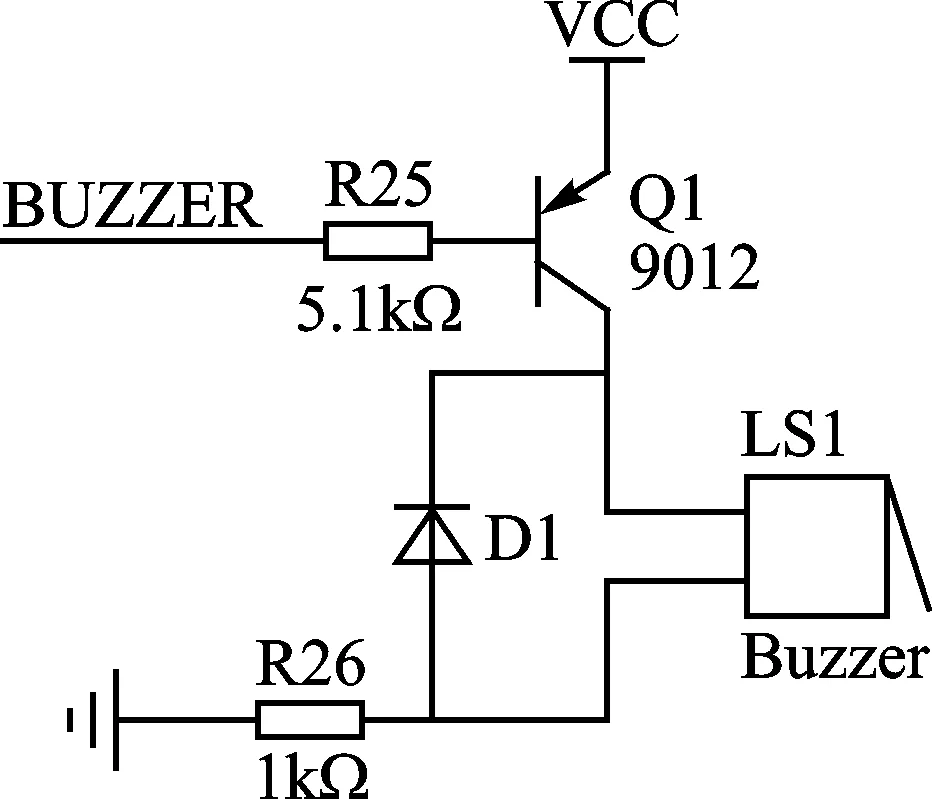
圖7 無源蜂鳴器控制電路
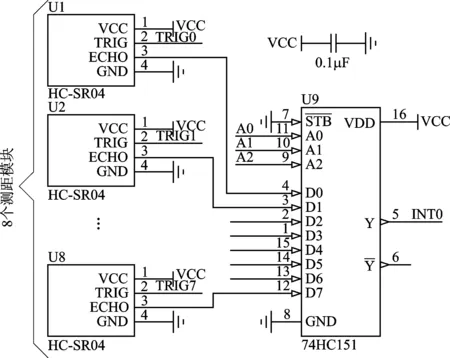
圖8 多路超聲波測距模塊ECHO信號接入電路
針對多探頭輔助行車系統的需求,本文設計了一種復用電路,可以連接8個探頭,使系統具有極大的擴展性,系統原理圖如圖8所示。8個超聲波測距模塊的TRIG信號由單片機的8個I/O口進行控制,ECHO信號要接入單片機的外部中斷口,因此需要設計一種電路將這8個ECHO信號分時接入外部中斷引腳。選用74HC151多路信號復用器芯片,通過該芯片可以選擇一個ECHO信號接入外部中斷引腳。
3 軟件設計
3.1 外部中斷和計時器
ATmega16單片機的Timer1為16位計時器,計數范圍為1~65 535。系統使用8 MHz晶振,Timer1不使用預分頻,則Timer1計時范圍為:1~65 535 μs。在常溫下,測距模塊距離障礙物100 mm時,超聲波經過的距離為200 mm,超聲波傳播速度為340 m/s,則渡越時間為t=(0.2/340)×106≈588 μs;在常溫下,測距模塊距離障礙物2 000 mm時,超聲波經過的距離為4 000 mm,超聲波傳播速度為340 m/s,則渡越時間為t=(4/340)×106≈11 764 μs。可以看出,系統滿足從100 mm到2 000 mm范圍內的測距需求。
單個超聲波測距模塊的工作流程如圖9所示,使用AVR單片機的INT0引腳作為測距模塊ECHO信號接收端,利用ECHO信號高低電平變化來觸發INT0中斷。ECHO信號的上升沿和下降沿之間的時間即為測距時的渡越時間,使用外部中斷來捕捉ECHO信號的電平變化,使主程序流程簡潔,同時可以避免占用單片機資源和信號丟失等問題。
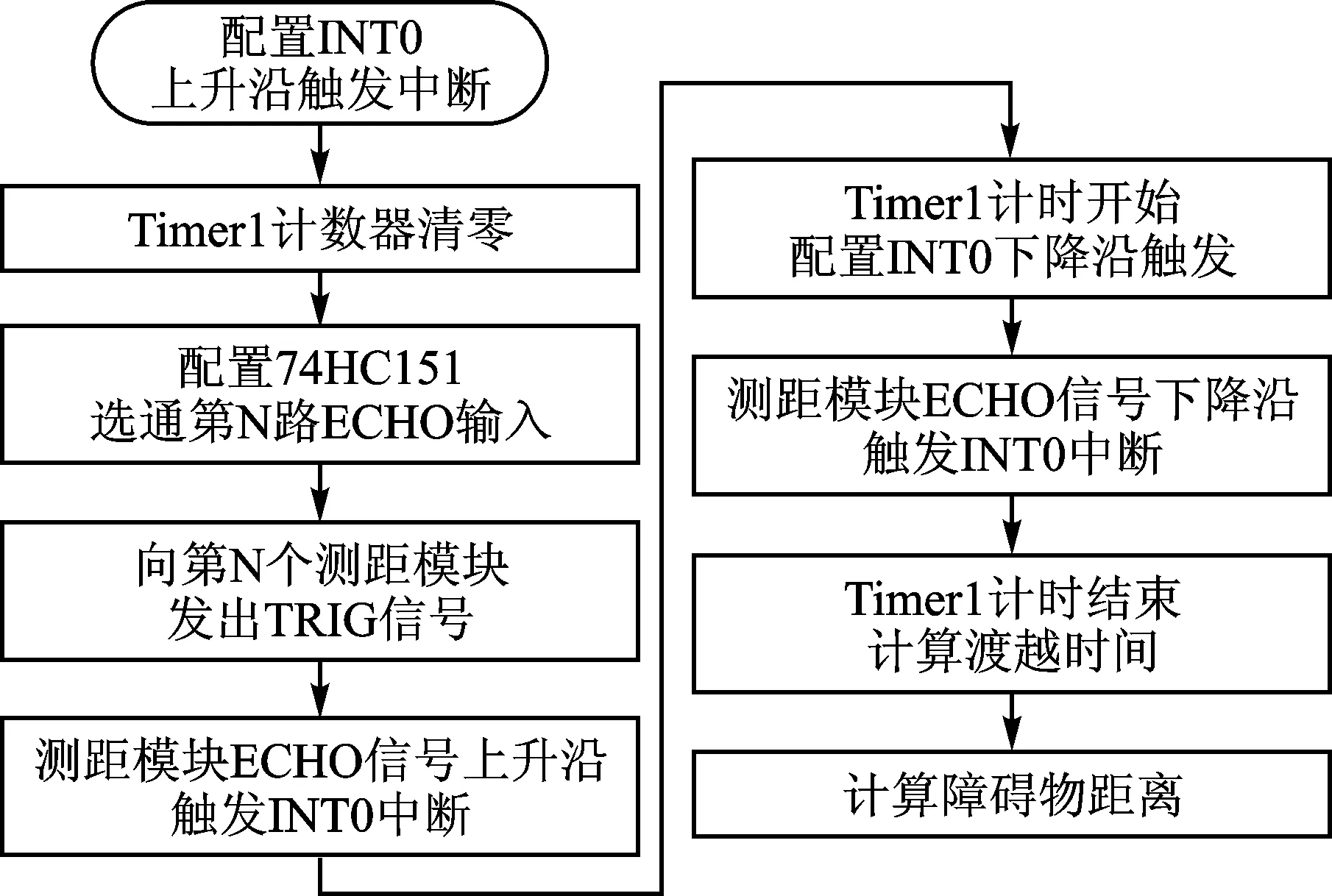
圖9 測距模塊工作流程
3.2 多路測距模塊輪詢檢測
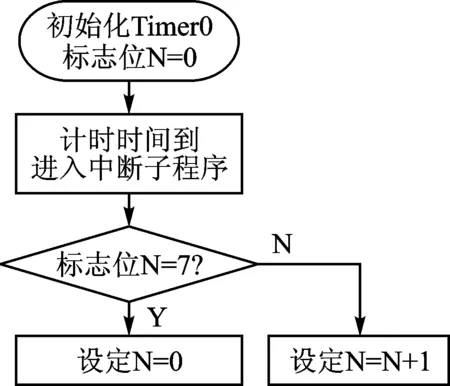
圖10 測距模塊標志位循環計數流程圖
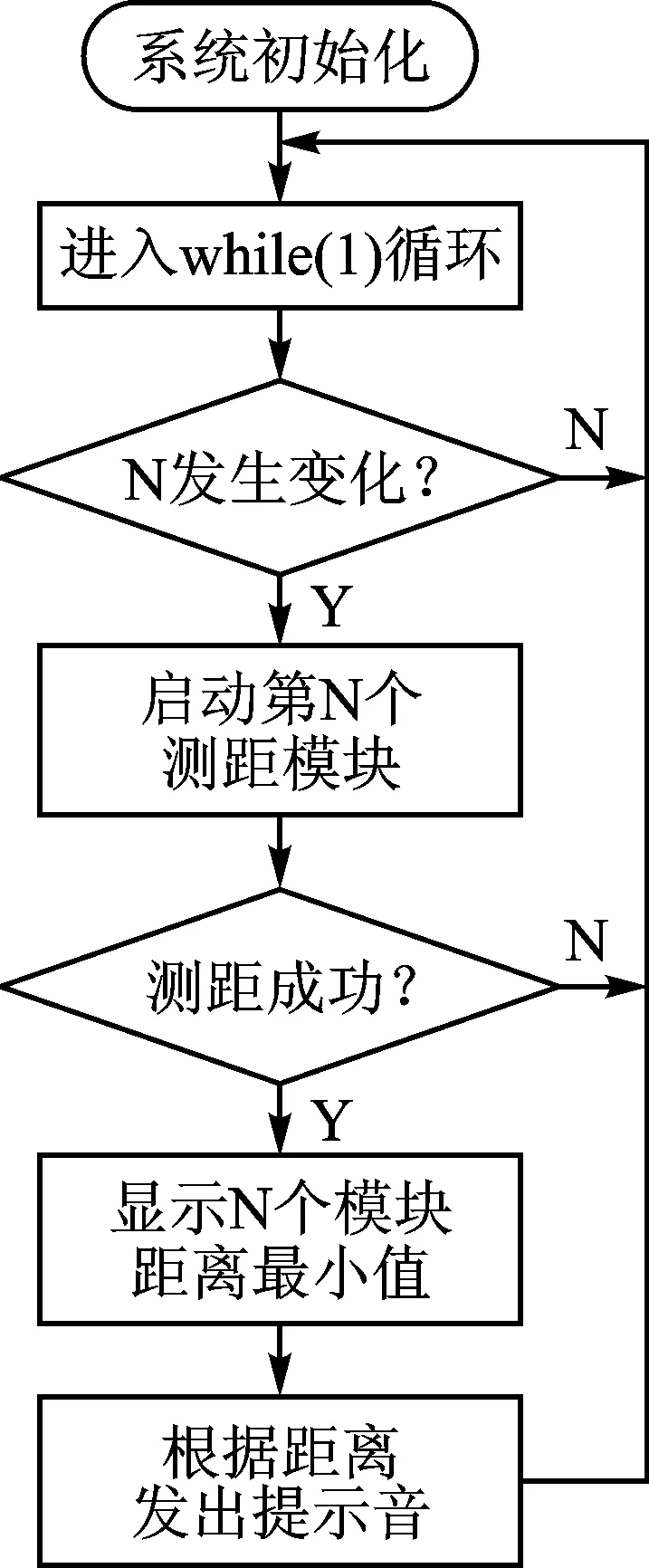
圖11 多路測距系統工作流程圖
本文對8個超聲波測距模塊(編號為0~7)進行輪詢檢測,圖10為測距模塊標志位循環計數示意圖。測距模塊最大距離為4 m,渡越時間最大不超過24 ms。單片機利用Timer0定時器,每100 ms產生一次中斷。每次進入中斷后,對標志位進行加1操作,到達7后又重新從0開始計數,使標志位在0~7之間循環。單片機按照該標志位對相應的測距模塊進行測距操作,并根據8個模塊中的最小距離進行顯示或報警。
本文中使用的測距模塊推薦的最大測量距離為4 m,渡越時間約為24 ms;每個模塊的工作間隔推薦值為60 ms,因此每個模塊工作總時間應該小于84 ms。本文將Timer0定時時間設置為100 ms,8個測距模塊全部工作一次耗時800 ms,可滿足日常應用。圖11為多路測距系統工作流程圖,系統初始化之后將進入循環,啟動第N個測距模塊,進而顯示出距離值。
結 語
本文設計了基于AVR單片機的雷達輔助行車系統,該系統具有硬件電路簡單、軟件設計高效、測距精度高等特點,相比于常見的車尾倒車雷達系統,本系統不僅能滿足倒車的應用需求,且能在車多緩行環境下實現車輛跟車和剎車的距離提醒,更有利于駕駛員掌握車輛周圍的行車環境,保障行車安全。
[1] 陸城富, 許宜申,吳茂成. 基于超聲波測距的二維倒車雷達系統設計[J].單片機與嵌入式系統應用, 2015(10): 59-61.
[2] 韓韌, 金永威, 王強.基于STM32和超聲波測距的倒車雷達預警系統設計[J]. 傳感器與微系統, 2016, 35(4): 63-66.
[3] 范志芳, 王磊朋. 汽車倒車雷達功能實現簡述[J]. 輕型汽車技術, 2015(7): 42-45.
[4] 嚴敏. 基于單片機的倒車雷達系統的設計與實現[J]. 蘇州市職業大學學報, 2016, 27(3): 25-29.
[5] 何乃龍, 沙奕卓, 行鴻彥. 新型車載倒車雷達監控系統的設計與研制[J]. 信息技術, 2016(3): 1-5.
倪建華,主要從事汽車整車及零部件的技術研發、質量管理等工作。
結 語
本文提出了一種基于WiFi模塊的圖像高速傳輸方案,重點講述了利用TI的CC3200 WiFi模塊傳輸圖像的過程。利用WiFi技術,智能車可以高速而有效地將圖像信息傳送給計算機,大大地提高了調試效率。
參考文獻
[1] 卓晴,黃開勝,邵貝貝.學做智能車[M].北京:北京航空航天大學出版社,2007.
[2] 郭書軍,田至鵬.基于單片Wi-Fi MCU CC3200的無線串口[J].儀器儀表用戶,2016(1).
[3] 橋亮,王建軍.基于DMA技術單片機數字攝像頭圖像采集系統設計[J].機械與電子,2015(9).
[4] 楊曉,李戰明.面向系統級芯片的串行外設接口模塊設計[J].計算機應用,2015(12).
[5] 陳文周.WiFi技術研究及應用[J].數據通信,2008(2).
[6] 張文亮,程紹瀾.WiFi網絡通訊技術在煤礦井下的應用分析[J].信息通信,2013(2).
朱為、滕璞駿(本科),主要研究方向為機械工程與自動化學院;聞時光(講師),主要研究方向為嵌入式系統設計和機器人控制。
(責任編輯:楊迪娜 收稿日期:2016-11-28)

[3] 陳鑫,秦宏偉,陳春雨,等. 基于Cortex-M3內核的STM32微控制器研究與電路設計[J].大慶師范學院學報,2013(6): 44-47.
[4] 廖平,韓偉偉. 基于STM32多步進電機驅動控制系統設計[J]. 儀表技術與傳感器,2016(4):71-73.
[5] 李敏,孟臣. 單片K型熱電偶放大與數字轉換器MAX6675[J].單片機與嵌入式系統應用,2003(9): 41-43.
[6] 王成成,李夢倩,雷文,等.3D打印用聚乳酸及其復合材料的研究進展[J].塑料科技,2016(6): 89-91.
[7] 張勝,徐艷松,孫姍姍,等.3D打印材料的研究及發展現狀[J].中國塑料,2016(1):7-14.
[8] 楊亮,傅瑜,鄧春健,等. 基于嵌入式平臺3D打印機研制[J]. 實驗技術與管理,2015(12):89-92.
孫超林(本科生),主要研究方向為硬件電路設計;王鑫(實驗師),主要研究方向為自動控制、嵌入式開發。
(責任編輯:楊迪娜 收稿日期:2016-11-04)
All-dimensions Radar Aided Driving System Based on AVR Microcontroller
Ni Jianhua
(Jiangsu Kawei Auto Industrial Group Co.,Ltd.,Danyang 212323,China)
Aiming at the parking problem caused by the 4 probes reversing radar existing the visual blind spots,a kind of all dimensions radar aided driving system with 8 probes is proposed.The 8 probes are arranged in the front and the rear.The system uses part of them when the car goes forward or reverses,and it can achieve the functions of the multi-channel obstacle detection,the distance display and the sound alarm through AVR SCM,the radar ranging module,the liquid crystal display module and the buzzer module.This radar aided driving system can help the driver to judge the distance of the obstacle,and get the whole information around the car.
automotive radar;AVR SCM;interrupt handling;aided driving system
TB559
A
迪娜
2017-01-09)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
