單晶圓注入機注入角度測量與補償系統設計
2017-04-25 08:32:30袁衛華鐘新華彭立波
電子工業專用設備 2017年2期
袁衛華,鐘新華,彭立波
(中國電子科技集團公司第四十八研究所,湖南長沙410111)
單晶圓注入機注入角度測量與補償系統設計
袁衛華,鐘新華,彭立波
(中國電子科技集團公司第四十八研究所,湖南長沙410111)
在超大規模集成電路生產線寬45 nm及以下的注入工藝環節中,離子束注入晶圓角度精度控制變得愈顯重要,注入角度的細小差別引起摻雜元素在晶體管中的分布深度和范圍的變化,進而導致器件參數和性能的巨大變化。研究表明注入角度控制取決于對注入離子束與晶圓面法線間水平和豎直方向角度測算的精確度;系統能精確測量出離子束注入角度,然后通過補償驅動旋轉靶臺到相應需求的角度后注入,滿足工藝需求。
單晶圓;注入機;角度;測量;補償
當前超大規模集成電路生產特征線寬45 nm及以下工藝注入中,線寬的日趨縮小。如晶體管Halo注入、柵閾值調整(VTH)、LDD注入,其注入工藝的參數控制要求越來越嚴格,注入過程中,離子束對整個晶圓面的注入角度要求嚴格,由于注入角度的細小差別引起注入元素在晶體管中的分布深度和范圍的變化,可能導致器件性能參數的巨大變化。
在注入工藝中,隨著線寬減小導致柵極重疊-柵極長度(Lg)微縮,橫向擴散程度的降低,摻雜雜質不能進行充分的橫向擴散,達不到源漏擴展(SDE)/柵極橫向重疊的要求。為達到橫向重疊的要求,在源漏擴展(SDE)和預先無定形化摻雜(PAI)注入時,要求離子投射角盡量小,以防止其變化引起區域摻雜分布變化帶來漏電流擴大。在源漏注入工藝中,采用角度傾斜注入漏(LATID)結構能很好地抑制漏電流帶來的熱載流效應。由于注入離子束角度變化會導致不對稱源漏擴展(SDE)離子注入,柵極結構陰影效應,特別是柵極-柵極之間的間隙區域,結果形成非對稱性晶體管,從而限制柵極長度的縮小。因此對于大尺寸的單晶圓注入,離子束注入角度測量和補償的精度和重復性尤顯重要。
本文著重介紹單晶圓離子注入機注入離子束與晶圓面間水平和豎直方向角度的測量和補償系統(見圖1)。該單晶圓離子注入機采用帶狀平行離子束水平掃描與承載晶圓靶盤上下機械掃描結合。圖1中晶圓平面法線即X軸,β為離子束注入水平角度,α為注入豎直角度。
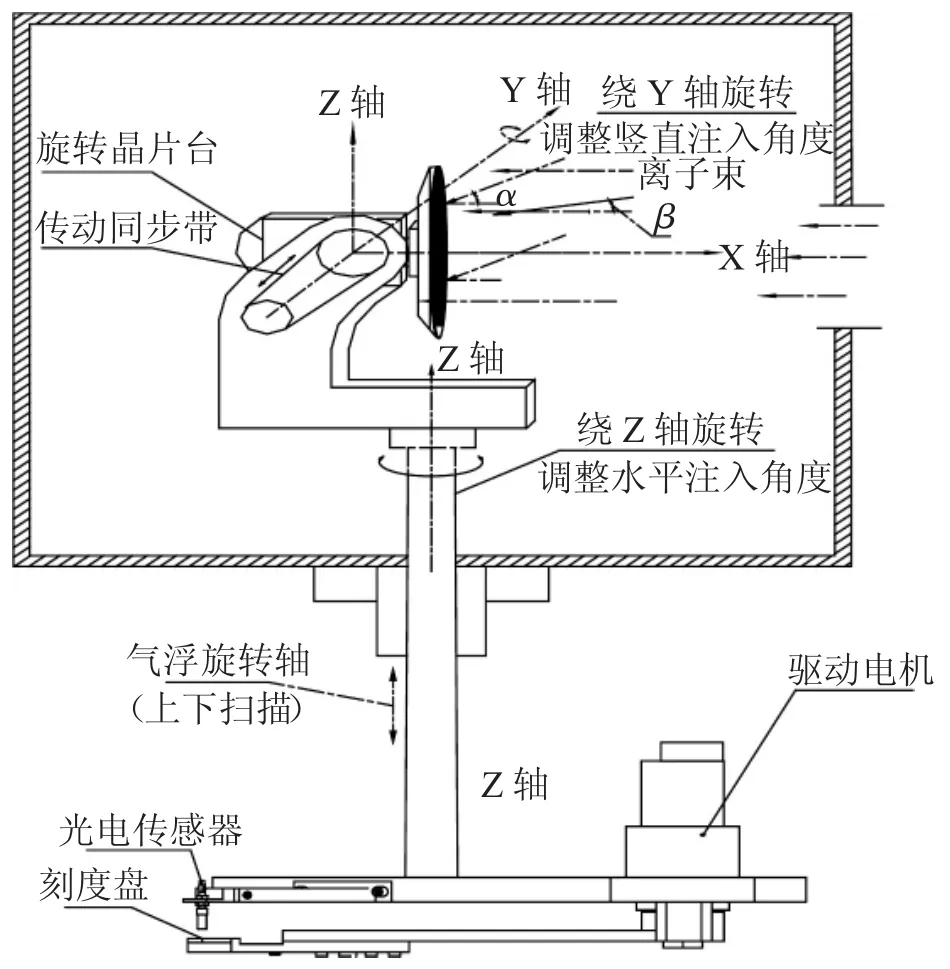
圖1 單晶圓注入機離子束注入角度簡圖
1 離子束注入水平角度測量及補償機構設計
1.1 離子束注入水平角度測量原理
如圖2所示,離子束注入到晶片中,在晶片位置設置1個或多個固定法拉第,設移動法拉第的寬度為W1,移動法拉第的深度為L,固定法拉第的寬度為W2,移動法拉第與固定法拉第的前后距離為H。
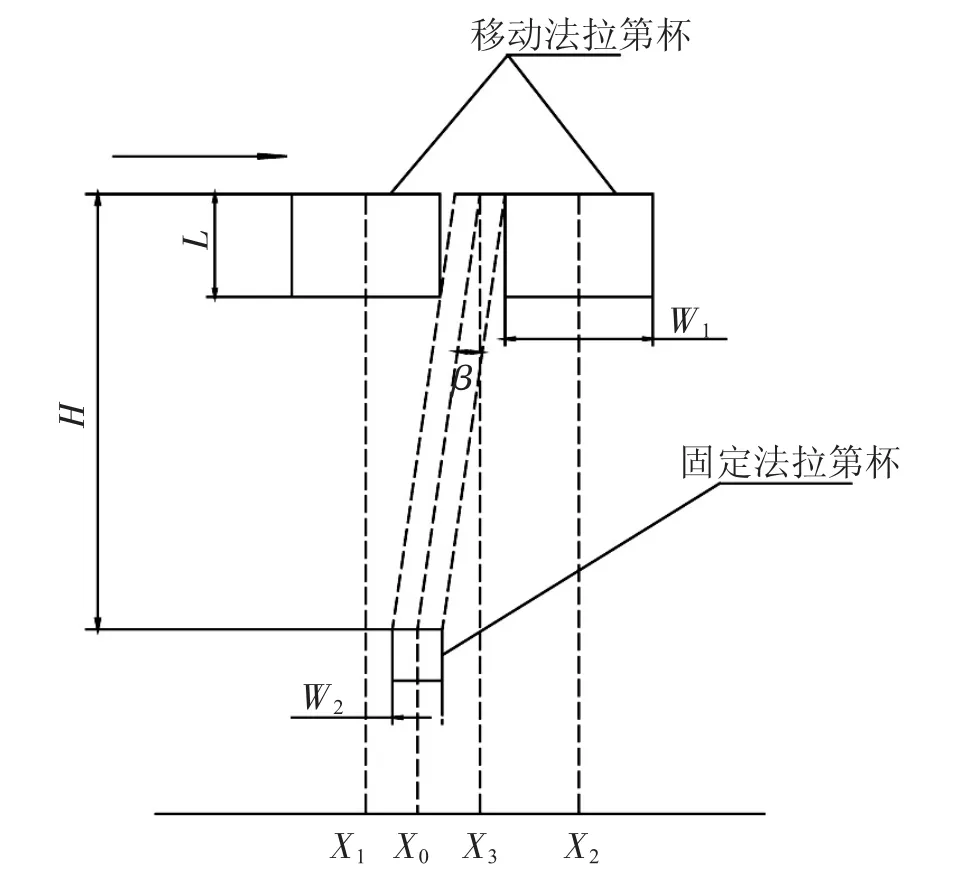
圖2 離子束水平注入角度測量原理簡圖
通過移動法拉第遮擋離子束,利用束流陰影效應,使固定法拉第形成電流曲線。將移動法拉第從左到右移動,當其運動到位置x1時,固定法拉第測得的束流開始減小,當移動法拉第運動到位置x2時,固定法拉第測得的束流恢復到最大值,x0為固定法拉第杯中點的位置,x3為固定法拉第發出的離子束中心線與移動法拉第上沿相交的位置。
得出離子束水平角度測量公式:
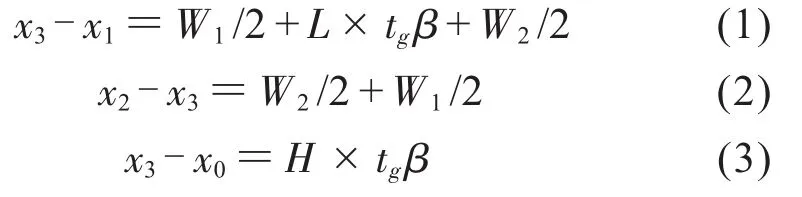
由式(1)、式(2)得:

由式(3)和式(4)得:


離子束角度為:控制移動法拉第從左到右移動,從固定法拉第上獲得如圖2所示的電流曲線圖,根據圖示計算出x1'和x2'兩點,x1'和x2'為固定法拉第杯電流峰值50%的兩點位置。
由圖3可知:

將式(7)代入式(6)即可計算出離子束水平角度。
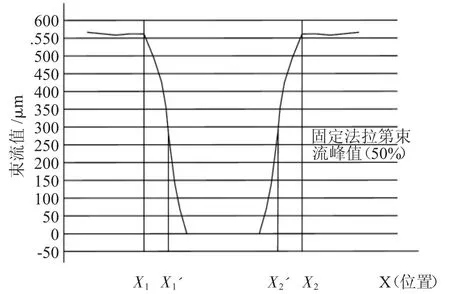
圖3 固定法拉第束流曲線圖
1.2 離子束注入水平角度補償
單晶圓注入機離子束水平注入角度β,是以晶圓平面法線(圖1中的X軸)與束流入射水平方向夾角為0時位置設置為0°,角度補償機構采用連桿驅動,驅動電機采用分辨率為500線光學編碼器,即電機每轉輸出500個脈沖;驅動電機帶減速機,輸出減速比為1∶10和電機驅動器電子齒輪比1∶2,算出光學編碼器每轉輸出10 000個脈沖,即水平注入控制角度精度(360/10000)=0.036°。先測算出離子束水平注入角度,再由控制系統驅動電機,帶動連桿旋轉靶臺在水平方向所需要的補償角度注入即可(見圖4)。
2 離子束豎直注入角度測量及補償機構設計
2.1 離子束注入豎直角度測量
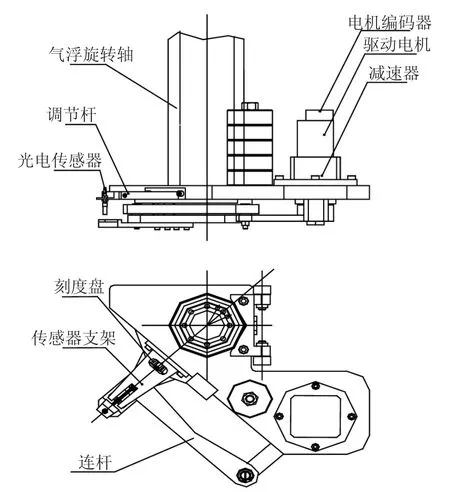
圖4 注入水平角度補償機構簡圖
離子束注入豎直角度測量方法為:如圖5所示,由于在束角度檢測之前,法拉第筒放置于水平位置,即與束流入射水平面的夾角α=0°,首先,驅動控制法拉第筒向下運動到-α,法拉第筒與水平面的夾角由高精度旋轉編碼器實時測量所得,并反饋給運動控制器,形成位置閉環運動控制;然后,驅動控制法拉第筒從-α位置向上作俯仰運動到+α,并在-α位置開始直到運動到+α,每運動Δα,由運動控制器向束流實時測量控制器發一個觸發脈沖,觸發束流實時測量控制器采集一次法拉第筒捕獲的束流;最后,從采集所有的束流值中,找出最大束流值Imax所對應的角度α即為豎直方向的束角度,所以測得最大束流值時所對應的法拉第筒的角度即為豎直方向束角度。
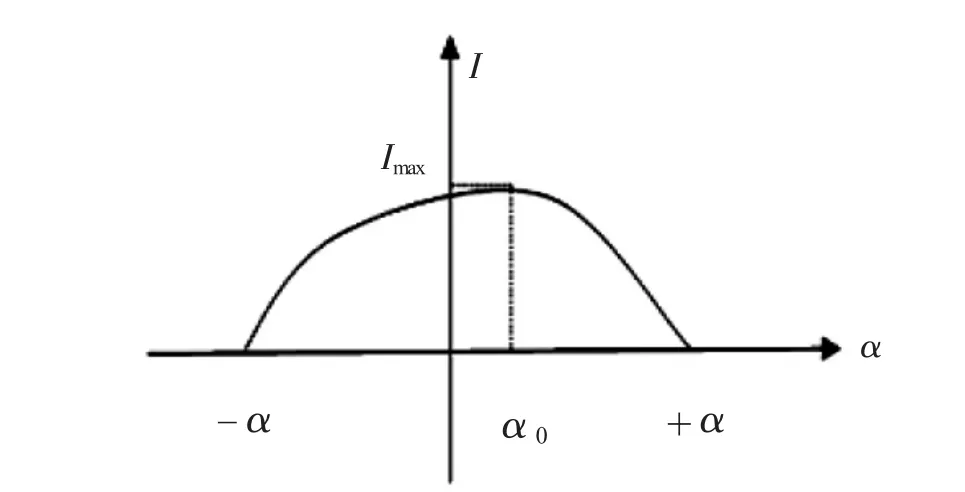
圖5 離子束豎直注入角度測量方法示意圖
離子束豎直注入角度測量機構,如圖6所示,包括用于束流采集的法拉第筒,法拉第筒由外電極筒、內電極板和石墨側板構成,內電極和外電極與石墨側板絕緣;承載法拉第筒并帶動法拉第筒作仰俯運動的傳動裝置,傳動裝置采用帶輪加減速器實現;直流伺服驅動電機;用于角度測量的高精度旋轉編碼器,測量精度為0.01°;運動控制器,采用基于嵌入式的動動控制模塊;用于束流實時測量控制器,法拉第筒采集的電流信號通過調理放大成0~ 10 V的電壓信號后輸入實時測量控制器;運動控制器和束流實時測量控制器進行位置與束流采集間的同步,運動控制器向束流實時測量控制器發同步脈沖,實時測量控制器每一個同步脈沖采集一次此時角度與之對應的束流值,法拉第筒每次轉動0.1°,即從-2.5°到+2.5°;從測量的束流值中找到最大束流值Imax對應的法拉第筒的角度,即為當前的離子束在豎直方向的束角度。
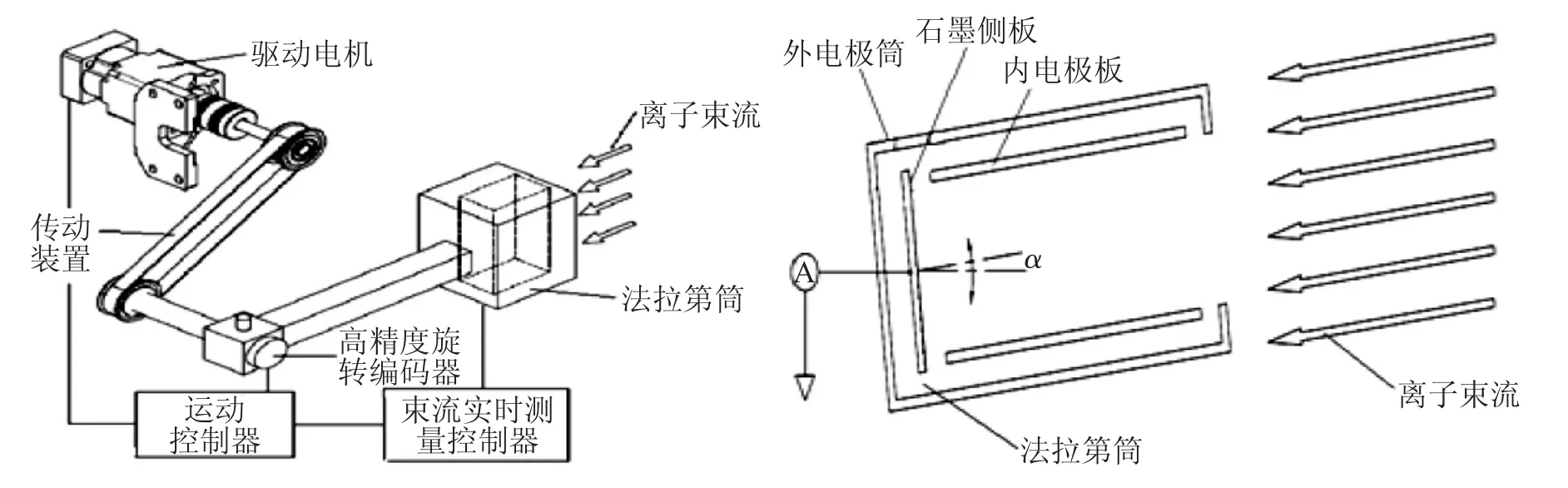
圖6 離子束豎直注入角度測量機構示意圖
2.2 離子束豎直注入角度補償
單晶圓注入機離子束豎直注入角度α(圖1中α),以晶片平面法線(圖1中的與Y軸垂直的X軸)與束流入射豎直方向夾角為0時設定為豎直注入角度α為0°。由豎直角度補償驅動機構即圖7中X軸旋轉機構采用同步帶傳動,驅動主帶輪安裝在帶編碼器的直流伺服電機軸上,同步帶傳遞輸出扭矩到從動輪,從動輪與X軸旋轉軸相連。
先測量出離子束豎直注入角度,再由控制系統發送指令,驅動電機,旋轉到在豎直方向所需要的補償角度注入即可。
3 實驗及結論
通過搭載了該注入角度測算與補償系統的單晶圓注入機在水平與垂直方向理論零度值的-2.5°到+2.5°區間內,以0.1°為間隔補償,注入多片晶圓,熱波探針測試注入后的晶圓,如圖8所示,測試結果,圖8(a)表明機構水平注入角度的絕對零度在0°,相應的水平注入角度的補償值為0°;圖8(b)表明機構垂直注入角度的絕對零度在0.2°,相應的垂直注入角度的補償值為-0.2°。
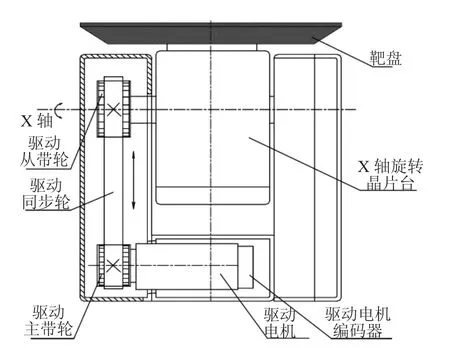
圖7 注入豎直角度控制機構簡圖
目前,該單晶圓離子注入機注入角度測量與補償系統已成功應用于國家02重大科技專項的“90/65 nm、300 mm中束流離子注入機”和“45/22 nm、300 mm低能大束流離子注入機”;搭載了該系統的兩型單晶圓注入機已成功進行集成電路商業生產流片,共計超百萬片,該系統運行穩定,注入角度測量與補償精確可靠。

圖8 注入角度熱波探針測試值簡圖
[1] 北京市輻射中心.離子注入機原理與技術[M].北京:北京出版社,1982.
[2] 羅宏洋,孫勇,謝均宇,等.一種平行束注入角度測量方法[P].中國專利:CN200610072964.2,2006-11-15.
[3] 鐘新華,易文杰,王迪平,等.一種離子注入機豎直方向離子束角度測控系統及測量方法[P].中國專利:CN201310699334.2,2014-04-09.
[4] 一種離子注入機束水平方向注入角度測控裝置及方法[P].袁衛華;鐘新華,彭立波;孫雪平,易文杰,許波濤,中國CN201310685659.0,2015-04-22.
Design of Injection Angle Measurement and Compensation System for Ion Implanter by Single Wafer
YUAN Weihua,ZHONG Xinhua,PENG Libo
(The 48thResearch Institute of CETC,Changsha 410111,China)
In the production process of wide 45 nm and the following link into the ultra large scale integrated circuit of ion beam implantation wafer angle precision control becomes more and more important,with small difference angle caused by the change of the distribution of the depth and range of doping elements in the transistor,which leads to great changes in device parameters and performance.Study on analysis of injection angle control depends on the measurement of ion beam implantation and wafer surface normals between horizontal and vertical angle accuracy,the device can accurately measure the ion beam angle,and then to the injection angle corresponding demand by compensation driven rotary wafer,meet the technical requirements.
Single wafer;Ion implanter;Angle;measure;Compensate
TN305
A
1004-4507(2017)02-0011-05
袁衛華(1982-),男,湖南新化,工程師,主要從事半導體設備的研發。
2017-01-18
鐘新華(1975-),男,湖南衡南,高級工程師,碩士,主要從事半導體設備的研發和數值計算工作。
彭立波(1972-),男,湖南漣源,高級工程師,主要從事半導體設備的研發。
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
火花(2019年12期)2019-12-26 01:00:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
人大建設(2019年12期)2019-05-21 02:55:32
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
學苑創造·A版(2015年11期)2016-01-14 09:03:27
中國火炬(2010年8期)2010-07-25 11:34:30