關于PIR豎放時的感知規律和應用的探索
2017-04-25 08:59:26趙俊江張會新
電子器件 2017年2期
趙俊江,張會新*,盧 云
(1.中北大學電子測試技術國家重點實驗室,太原 030051;2.中北大學儀器科學與動態測試教育部重點實驗室,太原 030051)
關于PIR豎放時的感知規律和應用的探索
趙俊江1,2,張會新1,2*,盧 云1,2
(1.中北大學電子測試技術國家重點實驗室,太原 030051;2.中北大學儀器科學與動態測試教育部重點實驗室,太原 030051)
在探索PIR傳感器基本探測規律實驗中,發現PIR豎直放置時,其對目標的感應波形變化與最初我們推測與水平放置感知規律一致的想法不同,因此針對其豎直放置的情況通過改變不同目標的運動軌跡做了全面而具體的實驗,最后實驗結果證實了我們當時的發現。這個發現不僅讓我們對PIR的性質有了更深層次的認識和了解,而且該性質拓寬了PIR的應用領域,對PIR應用普及有非常高的利用價值。
傳感器原理;豎放感知規律;實驗規律提取;雙元熱釋電紅外傳感器;原理應用
熱釋電紅外傳感器是一種被動式傳感器,靠接收人體輻射的紅外線進行檢測,并以電壓信號的形式表示出來。目前熱釋電紅外傳感器多用于各種自動化控制、防盜報警、來客告知及非接觸開關等紅外領域。雙元熱釋電紅外傳感器可用于檢測周圍環境中的紅外輻射信號,并且具有體積小、成本低、功耗低和靈敏度高等特點,作為價格昂貴的圖像及熱成像紅外設備的替代品,廉價又可以靈活搭建的分布式紅外傳感器網絡,已經開始被用來取代視頻跟蹤。
經過相關資料的查詢可知,雙元熱釋電紅外傳感器都是用于傳統水平放置的探測環境下,同時查閱文獻也未曾發現有豎直放置使用的情況。因此對雙元熱釋電紅外傳感器豎直放置波形規律的探索是非常有意義的。PIR傳感器水平放置使用時的探測規律是:由于PIR與光學透鏡配合使用的情況,PIR感知范圍是有一定夾角的感知面,目標水平運動軌跡相對于傳感器水平軸線的豎直距離越短,傳感器探測到的波形幅值越大,當熱源的運動軌跡與傳感器軸線水平對齊時波形幅值達到最大;相反,目標運動軌跡和傳感器水平軸線之間的豎直距離越遠,波形幅值越小;不論目標運動軌跡位于PIR水平軸線豎直方向的上端還是下端,感知波形的方向性(波形先正后負或者先負后正,即類正弦波和類反向正弦波,下文所說波形的方向性如同此解釋)都不變;對于雙元熱釋電傳感器來說,由于兩敏感元接入電路的方向正好相反,其感應到紅外信號后產生的電壓正好一正一負,所以當PIR水平使用時,目標不同的水平運動方向,會產生兩種不同的波形形狀——類正弦波和類反向正弦波,即對于目標運動方向的不同,傳感器采集的電壓信號具有方向性。因此可以通過觀察波形方向來判斷目標的運動方向。前期因為有水平放置PIR探測實驗的經驗,所以一直推測豎放會和水平放置產生的探測規律一樣。但經過詳細、完整實驗證明,雙元熱釋電紅外傳感器豎直放置時對目標感知波形變化規律與其水平放置使用時的探測規律不同,這對深入了解PIR的各項性質有很大幫助,并且拓寬了PIR的應用環境和領域。
1 PIR內部結構和工作原理
1.1 PIR內部結構
如圖1是一個雙元熱釋電紅外傳感器內部結構示意圖,對外共接3個接線端,使用時D端接電源正極,G端接電源負極,S端接信號輸出。該傳感器內部串聯著兩個極性相反、特性一致的探測元,其目的是為了消除因環境和自身變化產生的干擾。
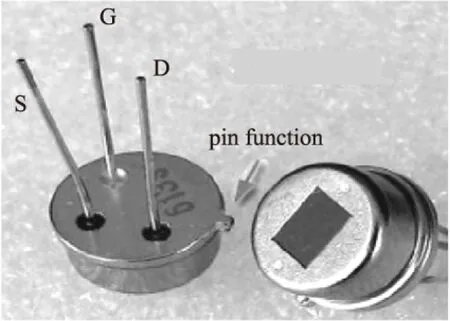
圖1 雙元熱釋電紅外傳感器的實物圖
1.2 PIR工作原理
當外部紅外信號輻射至傳感器,通過光學透鏡將其聚焦后作用于兩個敏感單元,從而產生電信號。其中場效應管起到阻抗變換的作用。殼體上的濾光片主要實現阻止其他波段紅外輻射通過,并使探測的紅外波段輻射順利通過。
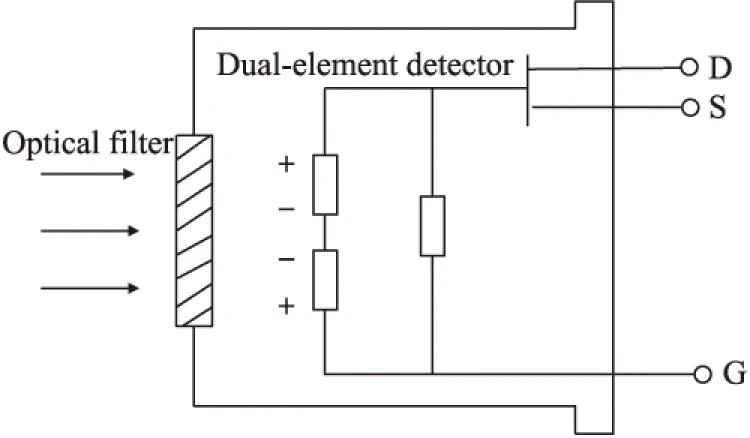
圖2 雙元熱釋電紅外傳感器的電路圖
2 實驗驗證
2.1 實驗的硬件搭建
運動目標模擬端(即標準熱源搭建如圖3):包括70W燈泡(與人體輻射出的紅外波相當)、導軌(機械手)、導軌控制器、導軌控制端(筆記本電腦)。
通過對控制端(筆記本電腦)輸入特定參數,將標準熱源速度設置為1.1 m/s(人的正常步速),并可通過控制端控制其運動或停止。由于熱源和導軌都是不變的,因此可以近似看成目標及其速度一定,這樣可以在實驗中更好的利用控制變量法,進行實驗數據處理及實驗結果分析。
信號波形采集端(如圖4):包括帶有光學透鏡的雙元熱釋電紅外傳感器、信號處理電路(濾波、放大功能)、數據采集卡、數字電源、數據顯示及存儲端(筆記本電腦)。
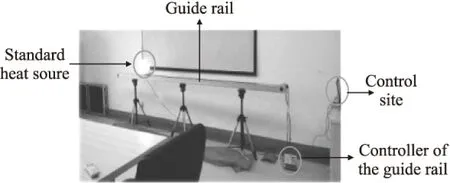
圖3 運動目標模擬端
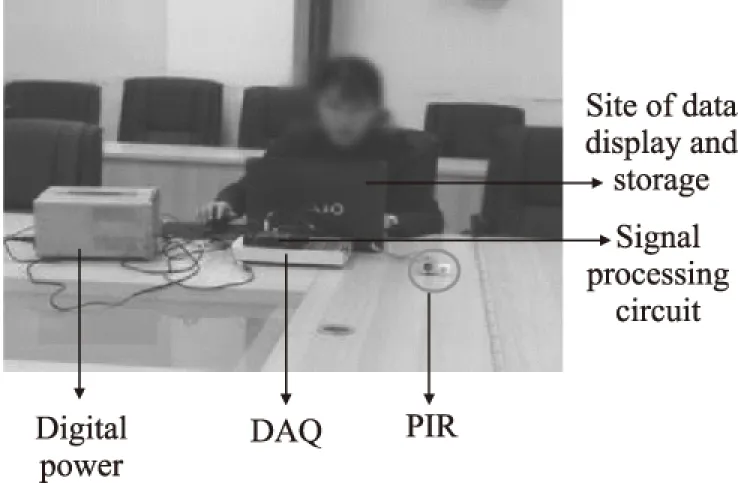
圖4 信號波形采集端
通過數字電源給信號處理電路板供電,并將信號處理電路板的輸出端連接到數據采集卡,然后將數據采集卡的輸出線與數據顯示及存儲端(筆記本電腦)進行連接。數據采集過程是:通過PIR進行紅外信號采集并產生相應電信號,然后通過電路板對采集到的信號進行放大和濾波,最后通過數據采集卡采集數字信號,并將數據波形顯示到電腦屏幕。

圖5 實驗裝置整體示意圖
2.2 具體實驗步驟
實驗1 將雙元熱釋電紅外傳感器豎直放置,在距其8 m處放置運動目標模擬裝置,其中導軌即標準熱源的運動軌跡要與PIR感知光軸垂直放置,并將標準熱源調整到與傳感器相同高度,然后通過導軌控制端啟動導軌控制器,使標準熱源以1.1 m/s的速度勻速運動。并以每0.3°為標準,逐漸改變傳感器感知光軸與水平面夾角(如圖5所示),使夾角從-1.5°到1.5°依次變化,同時使標準熱源沿軌道走一個來回(即正向及反向各走一次),然后分別觀察信號采集端的波形變化,并記錄實驗數據。
實驗2 將豎放的PIR沿中心線旋轉180°,即將傳感器上下對調,其他實驗步驟與實驗1完全一致。
2.3 實驗數據及分析
2.3.1 實驗數據
實驗數據如表1、表2所示。
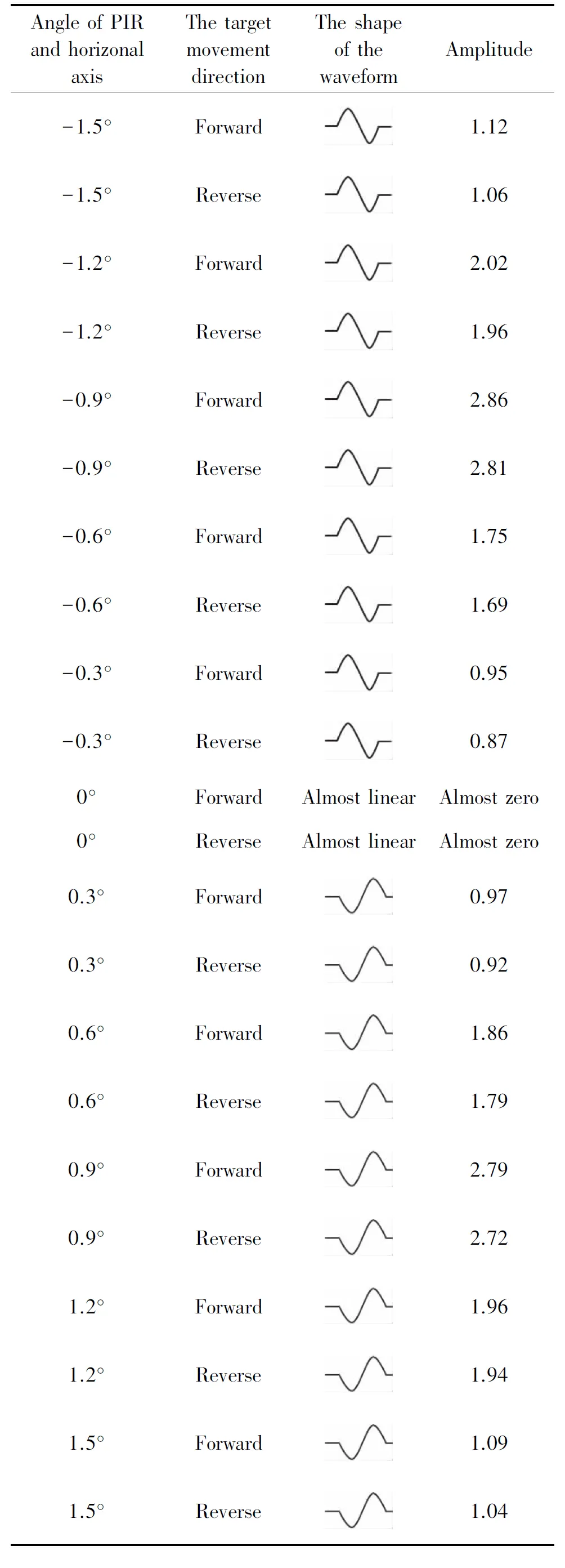
表1 實驗1的實驗數據

表2 實驗2實驗數據
2.3.2 數據分析
實驗1 夾角從-1.5°變化到-0.9°過程中感知波形幅值逐漸增大,到-0.9°時幅值最大,最大幅值為2.85 V左右,并且不管目標運動方向是正向還是反向,波形形狀一直是類正弦波;夾角在-0.9°到0°的變化過程中感知波形幅值逐漸減小,到0°時波形幅值最小,幾乎為零,并且不管目標運動方向是正向還是反向,波形形狀一直是類正弦波;夾角從0°變化到0.9°過程中感知波形幅值逐漸增大,到9°時幅值最大,最大幅值為2.8 V左右,并且不管目標運動方向是正向還是反向,波形形狀一直是類反向正弦波;夾角從0.9°變化到1.5°過程中感知波形幅值逐漸減小,到1.5°時波形幅值最小,最小幅值為1 V左右,并且不管目標運動方向是正向還是反向,波形形狀一直是類反向正弦波。
實驗2 夾角從-1.5°變化到-0.9°過程中感知波形幅值逐漸增大,到-0.9°時幅值最大,最大幅值為2.85 V左右,并且不管目標運動方向是正向還是反向,波形形狀一直是類反向正弦波;夾角在-0.9°到0°的變化過程中感知波形幅值逐漸減小,到0°時波形幅值最小,幾乎為零,并且不管目標運動方向是正向還是反向,波形形狀一直是類反向正弦波;夾角從0°變化到0.9°過程中感知波形幅值逐漸增大,到9°時幅值最大,最大幅值為2.8 V左右,并且不管目標運動方向是正向還是反向,波形形狀一直是類正弦波;夾角從0.9°變化到1.5°過程中感知波形幅值逐漸減小,到1.5°時波形幅值最小,最小幅值為1 V左右,并且不管目標運動方向是正向還是反向,波形形狀一直是類正弦波。
2.4 實驗結果及結論
經實驗驗證可知:雙元熱釋電紅外傳感器豎直放置使用與水平放置使用時采集到的波形變化相比,相同點是:產生的波形形狀相同,依然是類正弦波或類反向正弦波;同時隨著標準熱源運動軌跡的不同,采集到信號波形的幅值也同樣會產生變化。不同點是:波形幅值的變化規律不同,豎放時,隨著角度從-1.5°到1.5°的變化過程中,采集到波形幅值的變化情況是:先變大,后變小,再變大,最后再變小,在這個變化過程中,幅值最大的兩個位置對應角度分別是-0.9°和0.9°,最大幅值都為2.8 V左右;幅值最小的位置對應角度是0°,最小幅值近似為0 V;同時波形的方向性也不同,水平放置時,其方向性體現在目標運動方向上,即目標運動方向的正向和反向不同,波形會呈現出不同的波形形狀,即類正弦波和類反向正弦波;而豎直放置時,波形形狀的不同不會由運動方向的正負而體現,而是由運動軌跡經過傳感器的正、負敏感區而體現。
3 應用
關于雙元熱釋電紅外傳感器豎直放置使用探測規律的相關研究非常少,因此此次實驗發現的波形感知規律對拓寬PIR的應用領域奠定了非常重要的基礎,并對拓寬其應用范圍也起到非常重要的作用。
3.1 爬坡/下坡環境中的應用
當PIR安裝在移動平臺上時,移動平臺在處于爬坡/下坡地形中,對水平目標的觀測就需利用PIR豎直放置時的探測規律。
利用PIR豎直放置時感知原理中波形具有方向性及幅值變化原理,我們能很好的推測出目標與PIR感知光軸的相對偏差。
3.2 檢測傳感器左右安裝軸的水平性
首先將雙元熱釋電紅外傳感器豎直放置,將標準熱源高度調整到與PIR的理論軸線相水平,然后通過調整PIR傳感器與水平面夾角,找到兩個最大幅值位置中間并其幅值趨于0的位置(即幅值最小的位置),觀察傳感器與水平面夾角,因此可得出傳感器左右安裝軸的水平偏差。
4 結論
經試驗證明,雙元熱釋電紅外傳感器豎直放置與水平放置使用時感知波形的規律不同,當豎直放置時,隨著傳感器與水平軸線夾角的變化,感知波形幅值的變化過程分為4個階段,先增大,再減小,然后增大,最后再減小。同時波形的方向性,不再像水平放置時與目標運動方向有關,而是與目標運動在哪個探測敏感區相關。通過此次實驗,首次驗證雙元熱釋電紅外傳感器豎直放置使用時的感知探測規律,并且該發現也可應用在爬坡/下坡以及驗證傳感器左右感知光軸的水平性等特殊環境下,具有很大的應用價值,也為繼續深入研究雙元熱釋電紅外傳感器的工作原理和各項性質做了很好的鋪墊。
[1] 孫喬,楊衛,于海洋,等. 動態下紅外熱釋電傳感器的目標定位方法[J]. 紅外與激光工程,2012,41(9):2288-2292.
[2] 胡寧,吳華,王星,等. 雙機交叉定位誤差及配置距離最優化協調分析[J]. 火力與指揮控制,2013,38(1):40-44.
[3] 侯爽,楊衛,劉前進. 一種動靜PIR相結合的目標定位方法[J]. 光電子激光,2015,26(2):315-319.
[4] Jianwei H,Changming W. An Improved Direction-Finding Cross-Location Method[J]. Aerospace Electronic Warfare,2008,4:017.
[5] 李博雅,李方敏,劉新華,等. 基于PIR Sensor的單目標跟蹤系統設計與實現[J]. 傳感器技術學報,2014,27(9):1214-1220.
[6] 易金橋,黃勇,廖紅華,等. 熱釋電紅外傳感器及其在人員技術系統中的應用[J]. 紅外與激光工程,2015,44(4):1186-1192.
[7] 楊衛,趙迪,劉前進,等. 針對運動目標感知的動靜態雙坐標探測系統[J]. 紅外與激光工程,2014,(1):279-283.
[8] 吳鵬. 基于無線熱釋電傳感器網絡的人體目標跟蹤系統的研究[D]. 武漢:武漢理工大學,2012.
[9] 張曄,楊衛,岳元,等. 基于熱釋電紅外傳感器探測距離影響因素的研究[J]. 紅外與毫米波學報,2010,29(6):448-451.
Exploration on PIR Perceptual Rules and Applications Used Upright
ZHAOJunjiang1,2,ZHANGHuixin1,2*,LUYun1,2
(1.North University of China National Key Laboratory for Electronic Measurement Technology,Taiyuan 030051,China;2.North University of China Key Laboratory of Instrumentation Science and Dynamic Measurement,Taiyuan 030051,China)
On the experiment of exploring the detecting basic law on PIR sensor,we find,when PIR is upright,we believe that induction waveform changes is consistent with the laws of perception placed the level of the target,but the fact that our initial guess is different.Therefore,for the case of its upright position by changing the different target trajectories,we do a comprehensive and specific experiments.Finally,experimental results confirm our findings at that time.This discovery will not only allow us to have a deeper awareness and understanding of the PIR nature,but also broaden the application field of PIR. This will have a very high value for PIR universal application.
fundamentals of sensors;upright perception;the experiment rule extraction;the dual pyroelectric infrared sensor;perceptual rule application
2016-03-09 修改日期:2016-04-18
C:7230
10.3969/j.issn.1005-9490.2017.02.046
TN219
A
1005-9490(2017)02-0495-05
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
火花(2019年12期)2019-12-26 01:00:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
人大建設(2019年12期)2019-05-21 02:55:32
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
學苑創造·A版(2015年11期)2016-01-14 09:03:27
實驗流體力學(2011年5期)2011-01-14 01:25:28
