釀酒葡萄收獲機避障控制系統(tǒng)的設(shè)計
2017-05-02 23:36:17趙紫薇坎雜李成松王哲楊蘭
江蘇農(nóng)業(yè)科學(xué) 2017年3期
趙紫薇++坎雜++李成松++王哲++楊蘭濤


摘要:針對新疆地區(qū)釀酒葡萄立架種植模式下立柱傾斜影響機械化采收的問題,設(shè)計1種以可編程邏輯控制器(PLC)、檢測傳感裝置和模/數(shù)(A/D)轉(zhuǎn)換模塊為硬件核心,以Kingview 6.53為軟件開發(fā)平臺的釀酒葡萄收獲機避障控制系統(tǒng)。該系統(tǒng)在釀酒葡萄收獲機收獲時檢測立柱的傾斜方向、角度,并根據(jù)檢測結(jié)果與避障策略判斷立柱是否妨礙振動分離裝置采收,同時給出相應(yīng)的振動分離裝置調(diào)整信號,控制執(zhí)行機構(gòu)驅(qū)動振動分離裝置調(diào)整,最終達到自動避障的目的。
關(guān)鍵詞:釀酒葡萄;避障;可編程邏輯控制器(PLC);角度傳感器
中圖分類號: S24;S225.93文獻標(biāo)志碼: A
文章編號:1002-1302(2017)03-0192-03
收稿日期:2016-01-24
基金項目:國家自然科學(xué)基金(編號:51465051);新疆生產(chǎn)建設(shè)兵團工業(yè)科技計劃(編號:2013BA009)。
作者簡介:趙紫薇(1993—),女,甘肅武山人,碩士研究生,研究方向為智能化檢測與自動控制技術(shù)。E-mail:597949368@qq.com。
通信作者:坎雜,教授,博士生導(dǎo)師,主要從事農(nóng)業(yè)機械研究。E-mail:kz-shz@163.com。
目前,新疆地區(qū)釀酒葡萄的種植模式主要為立架種植模式,由于新疆地區(qū)冬季要對葡萄植株進行掩埋,以防葡萄受凍或風(fēng)干而不能形成粗硬的枝干,因此樹形主要為多主蔓扇形,立柱設(shè)置于葡萄行中部且間距較小,用于捆綁金屬網(wǎng)線與支撐葡萄藤葉。葡萄生產(chǎn)主要作業(yè)環(huán)節(jié)中的扒藤上架、除草松土、埋藤等會造成立柱空間位置的移動,且同一葡萄行的立柱傾斜方向、角度各異[1-3]。國內(nèi)外釀酒葡萄收獲機大部分采用中樞型振動分離裝置,該裝置在豎直方向上主要由多組對稱肋條組成,工作時分布在葡萄行兩側(cè),葡萄行中部的立柱傾斜時易與上部肋條碰撞。因此,確保振動分離裝置與立柱不產(chǎn)生碰撞是實現(xiàn)機械化收獲的關(guān)鍵技術(shù)[4],而國內(nèi)外現(xiàn)有的葡萄收獲機鮮有這方面的研究。因此,本研究針對新疆地區(qū)釀酒葡萄立架種植模式中立柱較密且傾斜方向角度各異的現(xiàn)狀,以中樞型釀酒葡萄振動分離裝置為基礎(chǔ)[5-6],研究1種基于可編程邏輯控制器(PLC)與組態(tài)王軟件的釀酒葡萄收獲機避障控制系統(tǒng),利用以角度傳感器為主要傳感器件的檢測傳感裝置,實現(xiàn)在釀酒葡萄收獲機運行時對立柱傾斜方向、角度的檢測,并根據(jù)檢測結(jié)果與避障策略判斷立柱是否妨礙振動分離裝置的運行,同時給出相應(yīng)的振動分離裝置調(diào)整信號,控制執(zhí)行機構(gòu)驅(qū)動振動分離裝置調(diào)整。
1系統(tǒng)總體方案
如圖1所示,釀酒葡萄收獲機避障控制系統(tǒng)硬件主要有檢測傳感裝置、模/數(shù)(A/D)轉(zhuǎn)換模塊、PLC控制器、上位機等組成。
本系統(tǒng)由檢測傳感裝置內(nèi)的1對角度傳感器將立柱的傾斜方向、角度值轉(zhuǎn)換成可識別的電信號,經(jīng)A/D模塊轉(zhuǎn)換為數(shù)字信號,送給PLC進行數(shù)據(jù)量程轉(zhuǎn)換處理,然后通過RS-232串口將檢測到的數(shù)據(jù)傳給上位機,上位機通過組態(tài)王軟件編制的處理程序?qū)⒃O(shè)定值與檢測值進行比較,確定是否需要避障,需要則輸出相應(yīng)的振動分離裝置調(diào)整信號,控制執(zhí)行機構(gòu)驅(qū)動振動分離裝置的調(diào)整。通過立柱后,振動分離裝置復(fù)位。
2系統(tǒng)硬件設(shè)計
2.1檢測傳感裝置設(shè)計
本研究針對目前新疆地區(qū)釀酒葡萄的立架種植模式,主要探測立柱的傾斜度,考慮立柱周圍枝條較多,并且會被藤葉覆蓋,避障系統(tǒng)采用紅外式、超聲波式、激光(雷達)式、視覺式檢測方法很難檢測出立柱的傾斜度。因此,本避障系統(tǒng)選用接觸式檢測方法,設(shè)計1個以角度傳感器為主要傳感器件的檢測傳感裝置,檢測立柱的方向與傾斜度。
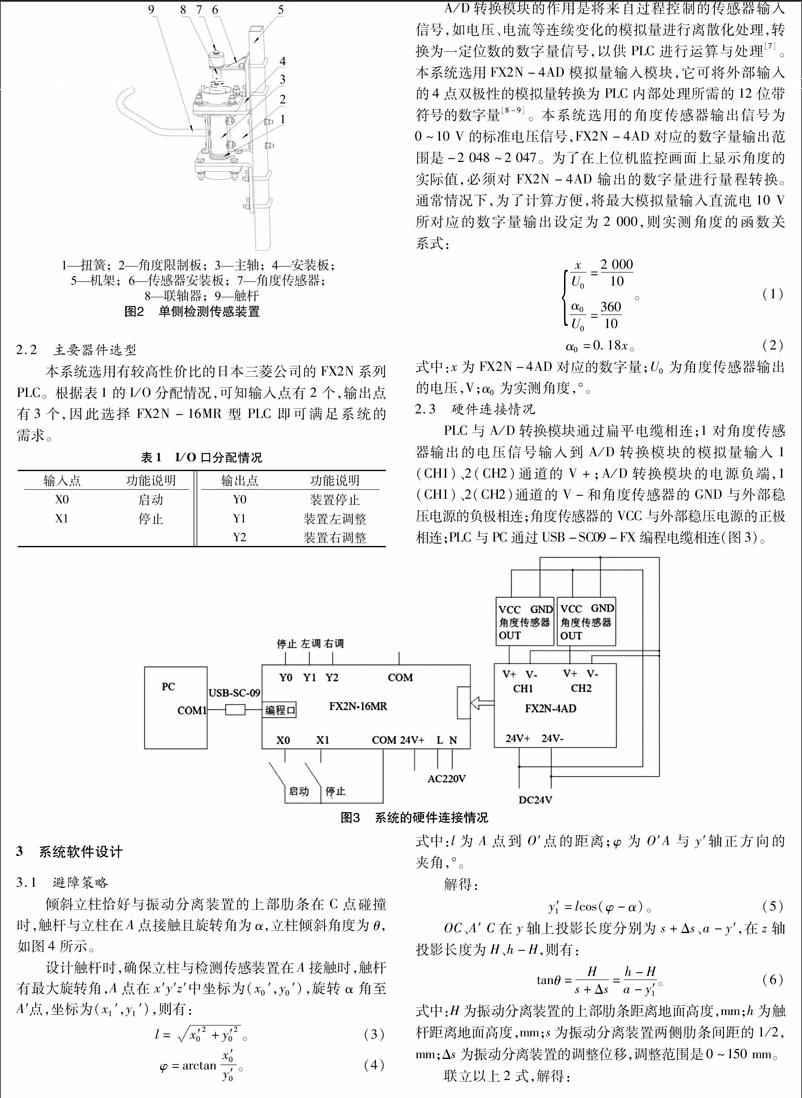
檢測傳感裝置對稱安裝在機架上,并可根據(jù)葡萄行的高度上下調(diào)整;當(dāng)觸桿接觸到立柱,會帶動主軸轉(zhuǎn)動,角度傳感器通過聯(lián)軸器檢測到相應(yīng)轉(zhuǎn)動的角度,并將相應(yīng)信號通過 A/D 轉(zhuǎn)換模塊傳送給PLC。當(dāng)1次檢測完成時,觸桿會在主軸兩端安裝的旋向相反的扭簧作用下及時回復(fù);為了防止觸桿反向轉(zhuǎn)動而影響檢測,在主軸與機架之間裝有角度限制板。單側(cè)檢測傳感裝置如圖2所示。傳感器選用P3036型霍爾無觸點角度傳感器,該傳感器所需供電電源為24 V直流電,信號輸出為0~10 V直流電,可360°連續(xù)測量,線性精度達03%F.S,靈敏度高,壽命長,可靠性高。
2.2主要器件選型
本系統(tǒng)選用有較高性價比的日本三菱公司的FX2N系列PLC。根據(jù)表1的I/O分配情況,可知輸入點有2個,輸出點有3個,因此選擇FX2N-16MR型PLC即可滿足系統(tǒng)的需求。
A/D轉(zhuǎn)換模塊的作用是將來自過程控制的傳感器輸入信號,如電壓、電流等連續(xù)變化的模擬量進行離散化處理,轉(zhuǎn)換為一定位數(shù)的數(shù)字量信號,以供PLC進行運算與處理[7]。本系統(tǒng)選用FX2N-4AD模擬量輸入模塊,它可將外部輸入的4點雙極性的模擬量轉(zhuǎn)換為PLC內(nèi)部處理所需的12位帶符號的數(shù)字量[8-9]。本系統(tǒng)選用的角度傳感器輸出信號為 0~10 V的標(biāo)準(zhǔn)電壓信號,F(xiàn)X2N-4AD對應(yīng)的數(shù)字量輸出范圍是-2 048~2 047。為了在上位機監(jiān)控畫面上顯示角度的實際值,必須對FX2N-4AD輸出的數(shù)字量進行量程轉(zhuǎn)換。通常情況下,為了計算方便,將最大模擬量輸入直流電10 V所對應(yīng)的數(shù)字量輸出設(shè)定為2 000,則實測角度的函數(shù)關(guān)系式:
[JZ(][JB({][SX(]xU0[SX)]=[SX(]2 00010[SX)][SX(]α0U0[SX)]=[SX(]36010[SX)][JB)]。[JZ)][JY](1)
[JZ(]α0=0.18x。[JZ)][JY](2)
式中:x為FX2N-4AD對應(yīng)的數(shù)字量;U0為角度傳感器輸出的電壓,V;α0為實測角度,°。
2.3硬件連接情況
PLC與A/D轉(zhuǎn)換模塊通過扁平電纜相連;1對角度傳感器輸出的電壓信號輸入到A/D轉(zhuǎn)換模塊的模擬量輸入1(CH1)、2(CH2)通道的V+;A/D轉(zhuǎn)換模塊的電源負端,1(CH1)、2(CH2)通道的V-和角度傳感器的GND與外部穩(wěn)[JP3]壓電源的負極相連;角度傳感器的VCC與外部穩(wěn)壓電源的正極相連;PLC與PC通過USB-SC09-FX編程電纜相連(圖3)。[JP][FL)]
[FK(W13][TPZZW3.tif][FK)]
3系統(tǒng)軟件設(shè)計
3.1避障策略
傾斜立柱恰好與振動分離裝置的上部肋條在C點碰撞時,觸桿與立柱在A點接觸且旋轉(zhuǎn)角為α,立柱傾斜角度為θ,如圖4所示。
設(shè)計觸桿時,確保立柱與檢測傳感裝置在A接觸時,觸桿有最大旋轉(zhuǎn)角,A點在x′y′z′中坐標(biāo)為(x0′,y0′),旋轉(zhuǎn)α角至A′點,坐標(biāo)為(x1′,y1′),則有:
[JZ(]l=[KF(]x′[KG-*3]02+y′[KG-*3]02[KF)]。[JZ)][JY](3)
[JZ(]φ=arctan[SX(]x′[KG-*3]0y′[KG-*3]0[SX)]。[JZ)][JY](4)
式中:l為A點到O′點的距離;φ為O′A與y′軸正方向的夾角,°。
解得:
[JZ(]y′[KG-*3]1=lcos(φ-α)。[JZ)][JY](5)
OC、A′ C在y軸上投影長度分別為s+Δs、a-y′,在z軸投影長度為H、h-H,則有:
[JZ(]tanθ=[SX(]Hs+Δs[SX)]=[SX(]h-Ha-y′[KG-*3]1[SX)]。[JZ)][JY](6)
[JP2]式中:H為振動分離裝置的上部肋條距離地面高度,mm;h為觸桿距離地面高度,mm;s為振動分離裝置兩側(cè)肋條間距的1/2,mm;Δs為振動分離裝置的調(diào)整位移,調(diào)整范圍是0~150 mm。[JP]
聯(lián)立以上2式,解得:
[FK(W17][TPZZW4.tif][FK)]
[JZ(]θ=arctan[SX(]Hs+Δs[SX)]。[JZ)][JY](7)
[JZ(]α=φ-arccos[SX(]aH+(s+Δs)(H-h)lH[SX)]。[JZ)][JY](8)
檢測前,可根據(jù)設(shè)計的已知數(shù)據(jù)求得設(shè)定角度范圍,則避障策略可根據(jù)檢測傳感裝置測得角度與設(shè)定角度的比較關(guān)系:(1)當(dāng)2邊檢測到的角度值都比設(shè)定的最小角度小時,不作處理;(2)當(dāng)1邊檢測到的角度在設(shè)定的角度范圍內(nèi),振動分離裝置向該邊調(diào)整距離Δs,直至可以安全通過;(3)當(dāng)1邊檢測到的角度值比設(shè)定的最大角度大,振動分離裝置停止運行。
3.2下位機軟件設(shè)計
下位機通過三菱PLC編程軟件GX Developer對PLC進行編程。GX Developer是三菱通用性較強的編程軟件,可以完成脫機編程、文件管理、程序傳輸和運行監(jiān)控等功能[10-11]。圖5為釀酒葡萄收獲機避障控制程序流程。下位機PLC在系統(tǒng)中主要完成的任務(wù)是對傳感器檢測到的經(jīng)A/D轉(zhuǎn)化后的數(shù)據(jù)進行采集、處理,隨后傳給上位機,以及接受上位機傳來的控制指令來驅(qū)動振動分離裝置的控制設(shè)備,從而實現(xiàn)釀酒葡萄收獲機采收免受立柱的影響,達到運行符合機械化收獲的要求。
3.3上位機軟件設(shè)計
上位機采用Kingview 6.53編制相應(yīng)程序,實現(xiàn)對控制流程和測量數(shù)據(jù)的顯示,建立釀酒葡萄收獲機避障控制系統(tǒng)監(jiān)控界面,能夠準(zhǔn)確實時再現(xiàn)被控對象的真實狀態(tài)。收獲人員在采收前輸入設(shè)定角度,隨后進入主界面,啟動后,當(dāng)檢測傳感裝置碰觸到傾斜的立柱時,實時趨勢曲線會快速地反映出角度的變化。[JP2]當(dāng)2邊檢測到的角度值都比設(shè)定的最小角度小時,安全指示燈亮,釀酒葡萄收獲機的采收部件振動分離裝置可以安全通過;當(dāng)1邊檢測到的角度在設(shè)定的角度范圍內(nèi),該邊的調(diào)整指示燈亮,相應(yīng)的振動分離裝置自動向該邊調(diào)整一定距離,保證裝置可以安全通過;當(dāng)1邊檢測到的角度值比設(shè)定的最大角度大時,報警指示燈亮,振動分離裝置停止運行,收獲人員需自行手動處理障礙物。具體監(jiān)控界面如圖6所示。[JP]
5結(jié)論
本研究針對新疆釀酒葡萄的種植模式和收獲現(xiàn)狀,設(shè)計釀酒葡萄收獲機的避障系統(tǒng),該系統(tǒng)采用三菱FX2N-16MR型PLC作為核心控制器,配合以P3036型角度傳感器為主要傳感器件的檢測傳感裝置,可對影響振動收獲裝置運行的立柱的空間位置進行實時監(jiān)測;并選用PC應(yīng)用Kingview 6.53工業(yè)組態(tài)軟件作為上位機,實時監(jiān)控系統(tǒng)工作狀態(tài),并對不同傾斜度給出不同避障策略,以保證釀酒葡萄收獲機安全、可靠、穩(wěn)定地運行,為新疆地區(qū)釀酒葡萄收獲機的進一步研究提供了參考。
參考文獻:
[1]趙中華. 新疆葡萄生產(chǎn)機械應(yīng)用現(xiàn)狀及發(fā)展方向[J]. 農(nóng)業(yè)技術(shù)與裝備,2008(4):33-34.
[2]裴新民,金曉青. 新疆釀酒葡萄生產(chǎn)機械化現(xiàn)狀及發(fā)展建議[J]. 農(nóng)業(yè)開發(fā)與裝備,2014(8):6-8,46.
[3]吳新聲,丁志欣. 新疆釀酒葡萄生產(chǎn)機械化現(xiàn)狀分析[J]. 新疆農(nóng)機化,2014(4):18-19,24.
[4][JP2]李成松,馮玉磊,王麗紅,等. 國外釀酒葡萄收獲機振動采摘部件結(jié)構(gòu)及應(yīng)用現(xiàn)狀[J]. 江蘇農(nóng)業(yè)科學(xué),2014,42(3):335-336,337.[JP]
[5]馮玉磊,坎雜,李成松,等. 基于振動原理的釀酒葡萄采摘試驗裝置的設(shè)計[J]. 江蘇農(nóng)業(yè)科學(xué),2013,41(11):404-406.
[6]李成松,高振江,坎雜,等. 雙支撐釀酒葡萄果實振動分離裝置作業(yè)機理[J]. 農(nóng)業(yè)工程學(xué)報,2015,31(4):26-32.
[7]郭從良. 信號的數(shù)據(jù)獲取與信息處理基礎(chǔ)[M]. 北京:清華大學(xué)出版社,2009:313-316.
[8]李金城. PLC模擬量與通信控制應(yīng)用實踐[M]. 北京:電子工業(yè)出版社,2011:67-86.
[9]李江全. PLC模擬量與通信控制應(yīng)用實例詳解[M]. 北京:電子工業(yè)出版社,2014:51-66.
[10]宋德玉. 可編程序控制原理及應(yīng)用系統(tǒng)設(shè)計技術(shù)[M]. 北京:冶金工業(yè)出版社,2014:123-125.
[11]江燕,周愛明 .PLC技術(shù)及應(yīng)用:三菱FX系列[M]. 北京:中國鐵道出版社,2013:17-27.