描述水輪機非線性特性的數據文件的研發
2017-05-06 03:46:19孔昭年楊遠生王柏柏程廣蕾周同旭熊曉蕾鄭瑤瑤
水電站機電技術 2017年4期
關鍵詞:系統
孔昭年,楊遠生,王柏柏,程廣蕾,周同旭,熊曉蕾,鄭瑤瑤
(1.中國水利水電科學研究院,北京100044;2.天津電氣科學研究院有限公司,天津300186)
描述水輪機非線性特性的數據文件的研發
孔昭年1,楊遠生2,王柏柏2,程廣蕾2,周同旭2,熊曉蕾2,鄭瑤瑤2
(1.中國水利水電科學研究院,北京100044;2.天津電氣科學研究院有限公司,天津300186)
我們基于Simulink開發了水輪機調節系統通用仿真程序,該通用程序結構的起始部分,配有包含水輪機型譜中所用水輪機綜合特性曲線的數據文件,以便于水輪機調節系統通用仿真程序的應用;在這個文件中用特征矩陣法來描述水輪機特性,從而大大提高水輪機調節系統仿真計算速度。
水輪機;調節系統;非線性特性;流量和力矩特性矩陣
在國家能源局“替代調壓井的新型調壓閥及其控制系統研究與電站示范應用”科技項目的安排下,中國水利水電科學研究院與天津電氣科學研究院有限公司合作開發了水輪機調節系統通用仿真程序。該程序的技術核心之一就是研發能真實水輪機動態特性、調用方便、能包含水輪機型譜及其他所用常用水輪機特性、數學方法先進、在計算中總體耗時小、利于推廣的數據文件。
利用計算機分析水輪機調節系統動力學特性,通常用數據表格插值法確定水輪機特性參數。引水系統中的水擊現象是水輪機調節系統的重要特性,它的本質是一個反向微分環節,在調節過程的起始階段力矩變化與調節目的相反。由于在水擊數學模型中有-Tw項,采用分段插值時常發生計算不收斂或緩慢收斂,在進行離線計算時常常要反復調整,利用電算分析這種人為地調整,經驗就顯得十分重要。采用實時仿真技術研究真實調速器動態特性時,發散意味著實時仿真試驗失敗。我們在開發實時仿真軟件時也觀察到這種現象。由于實時計算步長取0.05 S,在這樣短的時段內不僅要完成全部非線性微分方程式的求解,還要完成數據的輸出和采集、輸出實時頻率等功能。文獻[1、2]提出了這一方法。
由水輪機單位流量、水輪機單位力矩、水輪機單位轉速計算公式:
有水輪機流量、力矩計算公式:
采用相對參數值計算方法用角標“o”表征穩態值;“r”表征額定值;“△”表征偏差值則有:
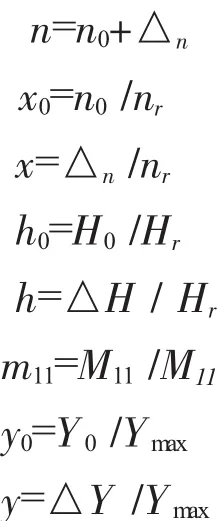
在線性化假設條件下導葉相對開度a=Y/Ymax=a/amax,由以上相應公式可有水輪機相對單位轉速、流量、力矩計算公式:
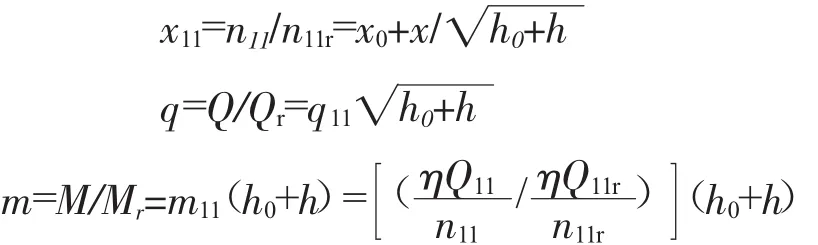
由水輪機綜合特性曲線可計算出相應的單位力矩和流量可有參數表并按規定格式輸入計算機。可用n-1次多項式表征時的流量:

顯然A1…An各參數是導葉開度的函數,相類地用n-1次多項式表征,當a=ai時,有:

由(2)可以歸納出在表格中各結點上的參數(q11)ij及(m11)ij,這些參數構成了求解有關系數的已知條件,并可有矩陣關系式:
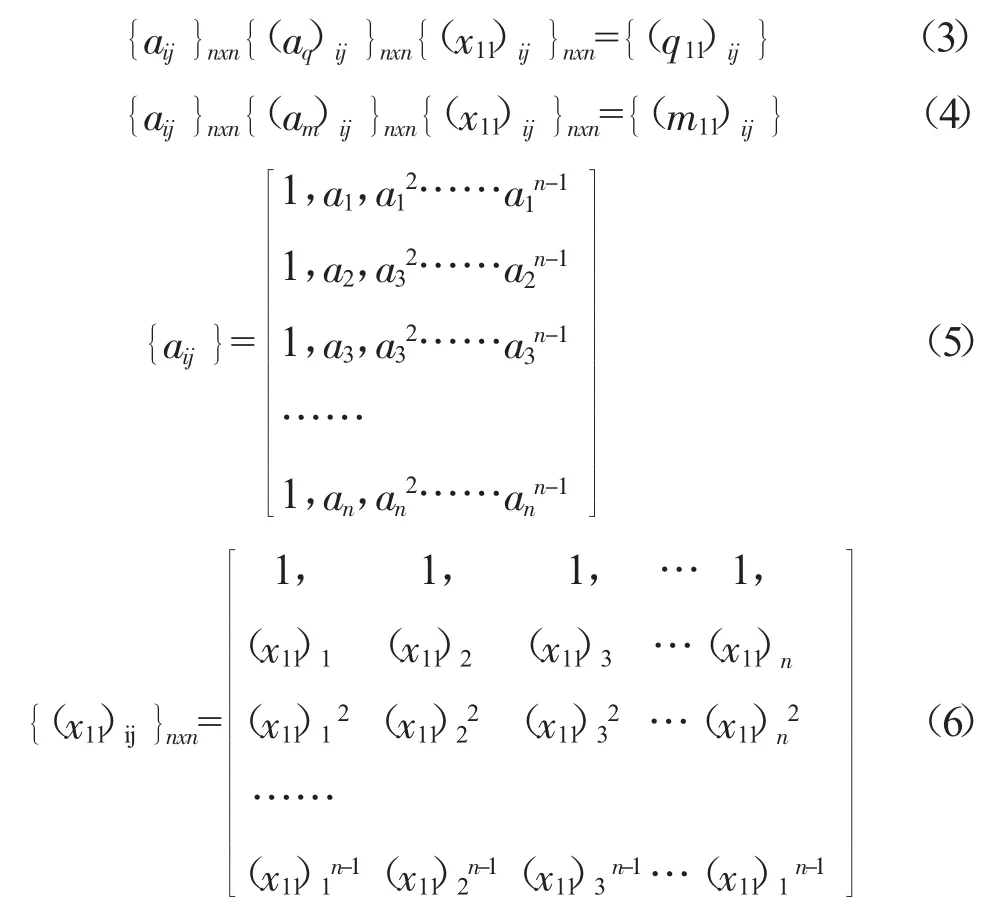

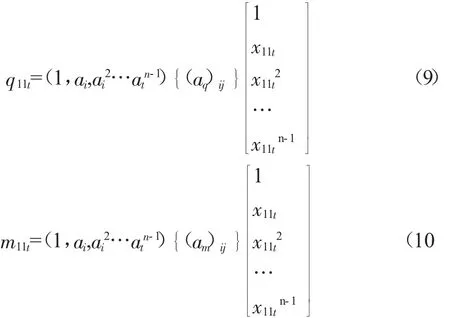
右端4個矩陣及水輪機流量和力矩的特性矩陣應在仿真數據準備階段根據有關數據表1(見下頁)求得,對于軸流轉槳式水輪機對應每個定槳特性相類地求取水輪機流量和力矩的特性矩陣;在實時仿真的主程序段,只要已知某一時刻的x11t和at就可很快計算出該時間的單位流量和單位力矩:
軟件結構設計時將水輪機流量、力矩特征矩陣的運算求取放在數據準備階段進行。現以一個具體的混流式水輪機展示它的應用。圖1(見下頁)為計算所用的水輪機綜合特性曲線,根據圖1,采用相對值法可有圖2(見下頁)所示混流式水輪機相對單位力矩及相對單位流量特性,根據此曲線有載于表1、2上的水輪機單位流量特性參數表和水輪機單位力矩特性參數表;根據此兩表及式(7)(8)可計算出該水輪機的流量、力矩的特征矩陣,從而可便于求解水輪機調節系統非線性微分方程式組(1)。在圖3上示出混流式水輪機機組啟動過程的仿真結果,該工程項目引水系統中具有調壓井,文獻[1,3]給出了帶調壓井引水系統的數學模型。
啟動的物理過程:接到啟動命令導葉開至啟動開度20%,機組轉速陸續增大;當增大至96%時調速器投入,系統出自動調節狀態;由于轉速尚有4%的偏差,導葉略自動開啟并單調地迅速調節到穩定值1.0,歷時40 s啟動過程結束。
根據我們的經驗,在確定的實時仿真計算步長時間內,取n=5可獲得滿意的計算結果,由于式(9)、式(10)是參數平面上的連續函數,據此進行的水擊計算更可保證不會發生不收斂現象。為說明這一方法的特點,現以n=5進行比較。
1)利用二元四次,插值時,可看成是進行了六次一元五點插值運算,要進行5次除法,5×8+5=45次加法,5×7=35次乘法,完成二元四次插值計算則需30次除法,270次加法,210次乘法。
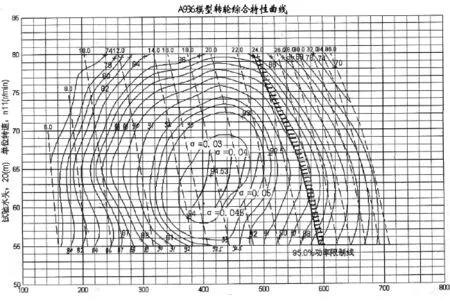
圖1 混流式水輪機綜合特性

圖2 混流式水輪機相對單位力矩及相對單位流量特性
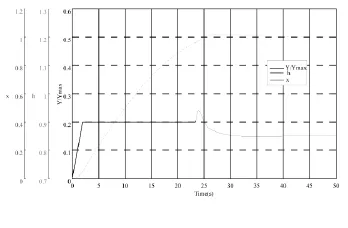
圖3 混流式水輪機調速器機組啟動過程的仿真結果(Td=6;bt=0.6;Ty=0.3;Ty1=0.3;Tn=1.0;Tn1=0.1xTn;Tg=4.5;Tf=4.5)

表1 水輪機單位流量特性參數表
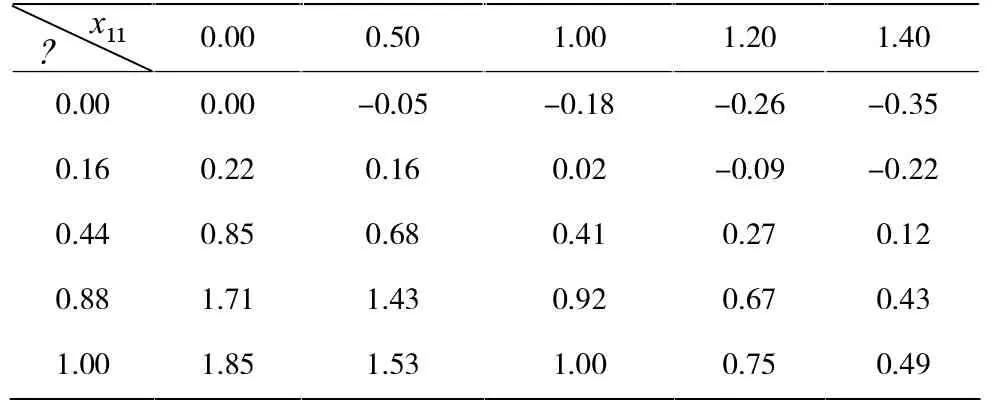
表2 水輪機單位力矩特性參數表

2)若排除分段插值不連續的因素,取二元三點(二次)插值法,實際上可以看成是進行四次一元三點插值法,可確定也需要采用56次加法,36次乘法,12次除法運算。
3)利用本文提出的方法,在形成有關行向量及列向量時,需要2×9=18次乘法運算;進行矩陣運算需要5×5+5=30次乘法運算,5×4+4=24次加法運算,僅進行48次乘法和24次加法運算。從而大大提高了實時仿真的計算速度。大大提高了仿真計算速度。
對于計算機說來,除法遠比加法和乘法費機時。由上述分析可以看出,本方法在確保水擊計算收斂性,提高運算速度方面有著明顯的優越性,利用這一方法還完成在剛性水擊條件下轉漿式水輪機實時仿真軟件的開發工作。項目組將已納入水輪機轉輪型譜所有混流式水輪機及轉槳式水輪機轉輪,如:HL260;HL240;HL180;HL160;HL90;ZZ500;ZZ450等綜合特性,并配有相應的表1、2;按本文方法計算出特征陣,匯總編制了供進行水輪機調節系統仿真專用的數據文件。我們利用該數據文件和開發的水輪機調節系統通用仿真程序,已針對多個電站水輪機進行大量動特性計算分析,如甩不同負荷、空載擾動、增減負荷、開停機操作等。總之,該數據文件內容豐富、調用方便、采用統一的數學方法,值得推廣。
[1]孔昭年.水輪機控制系統的設計與計算[M].武漢:長江出版社,2012.
[2]DL/T1120-2009水輪機調節系統自動測試及實時仿真裝置技術[S].
[3]DL/T 1548-2016水輪機調節系統設計與應用導則[S].
TK730
A
1672-5387(2017)04-0001-04
10.13599/j.cnki.11-5130.2017.04.001
2017-02-20
孔昭年(1941-),男,教授級高級工程師,從事水輪機控制技術研究工作。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32