基于容積卡爾曼濾波的高斯粒子濾波算法
2017-05-08 15:07:11趙丹丹劉靜娜賀康建
計算技術與自動化 2017年1期
趙丹丹 劉靜娜 賀康建
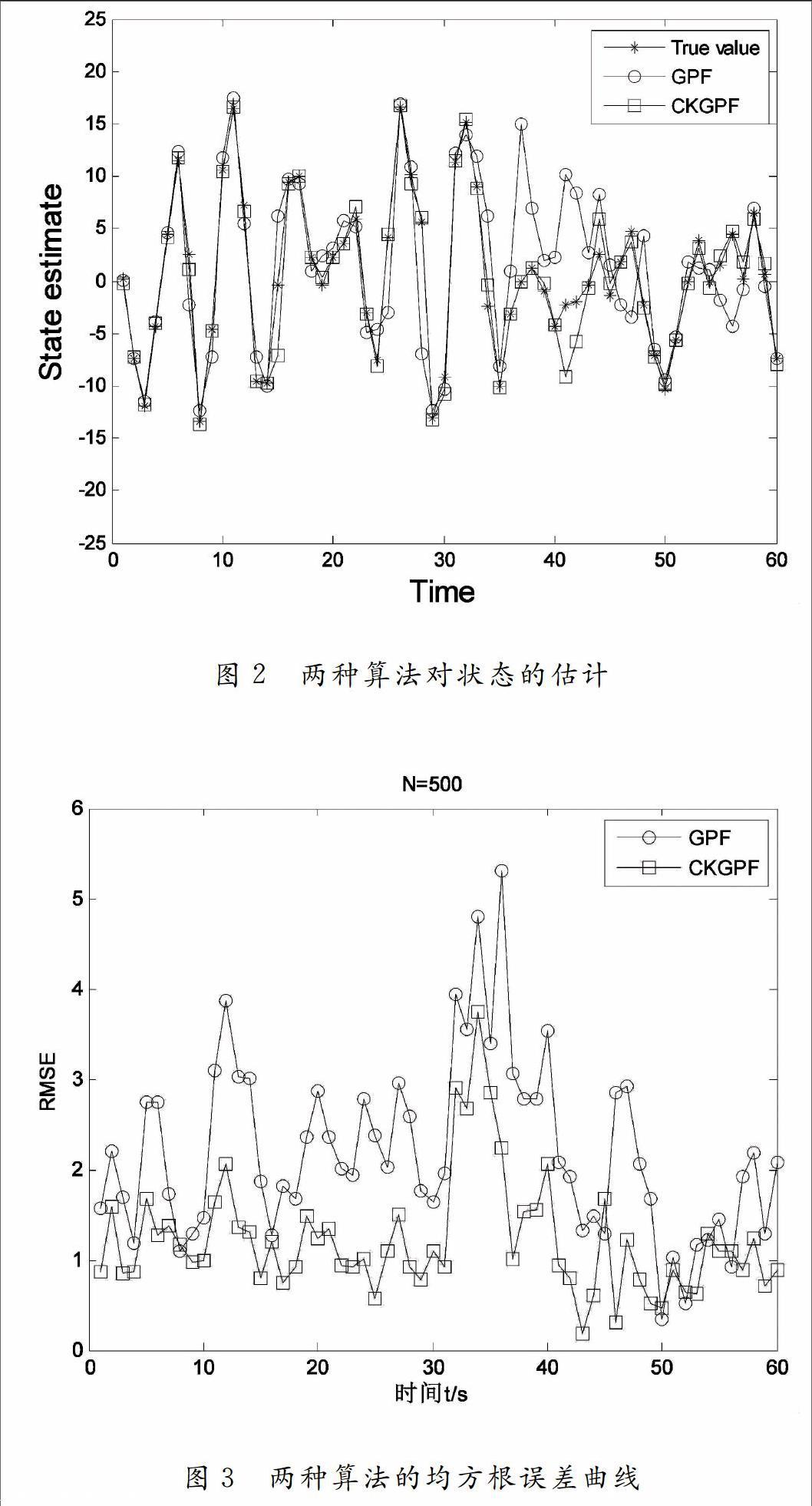


摘要:高斯粒子濾波是一種免重采樣的粒子濾波,不會出現粒子退化,但其重要性密度函數由于沒有考慮到最新量測信息,使得濾波性能明顯下降,且該算法沒有較高的實時性。針對這個問題提出一種基于CKF的高斯粒子濾波算法—CKGPF算法。該算法利用CKF算法構造高斯粒子濾波的重要性密度函數,且在時間更新階段借助CKF算法來完成只對高斯分布參數的更新。仿真結果表明,CKGPF算法相比于標準GPF算法不僅提高了濾波精度,而且還具有較好的實時性。
關鍵詞:高斯粒子濾波;重要性密度函數;實時性;容積卡爾曼濾波
中圖分類號:TP391 文獻標識碼:ADOI:10.3969/j.issn.10036199.2017.01.017
粒子濾波[1]是一種基于蒙特卡洛思想的非線性、非高斯系統的濾波方法,已在定位、目標跟蹤、無線通信、目標識別等領域得到了深入研究[2-4]和廣泛應用。但在標準的粒子濾波算法中,一般把先驗概率密度函數作為重要性密度函數,這種方法沒有把最新的量測值考慮進去,因而使得從重要性概率密度函數采樣得到的樣本與從真實后驗概率密度函數采樣得到的樣本之間存在很大的偏差,特別是當似然分布比較陡峭或是似然函數位于狀態轉移概率密度的尾部時,出現的偏差就更為顯著。因此,為了在算法中將最新的量測信息考慮進去,通常是將不同卡爾曼濾波和粒子濾波結合來構造重要性密度函數[5-7],但文獻[8]已給出證明盲目將兩種算法結合來構造新的重要性密度函數并不一定能獲得較好的濾波精度,且會增加計算復雜度,降低算法的實時性,而且粒子濾波本身就存在實時性較差的問題。隨著有限集多目標跟蹤的出現, 粒子濾波也進入了隨機集粒子濾波[9]新的發展階段。文獻[10]更是實現了隨機集粒子濾波對多目標跟蹤的應用。高斯粒子濾波[11]是針對解決粒子濾波重采樣中樣本枯竭問題的一種改進的粒子濾波,具有更高的濾波精度。但GPF同樣也是把先驗概率密度函數作為重要性密度函數,沒有考慮最新的量測信息,更新階段對所有的粒子進行更新,使得高斯粒子濾波沒有較高的實時性。文獻[12]提出了一種基于GHF的高斯粒子濾波算法,該算法采用GHF構造高斯粒子濾波的重要性密度函數但沒有考慮算法實時性問題。本文提出選用濾波精度明顯高于EKF和UKF的CKF來構造GPF的重要性密度函數,同時在GPF的時間更新階段通過CKF來完成只對高斯分布函數參數的更新,仿真結果表明,本文算法不僅提高了濾波精度,還具有更好的實時性。
2CKF算法
CKF算法是以非線性高斯濾波用以框架為基礎,利用Cubature規則選取2n個等權值的Cubature點,將這些Cubature點經過非線性的系統方程進行變換,然后進行加權求和來近似系統狀態的后驗均值和協方差。相比于EKF和UKF算法,CKF算法具有嚴密的理論推導,簡單易于實現且具有較高的濾波精度。
CKF具體算法和步驟如下[13]:
(1)時間更新
6結論
本文提出的基于CKF的高斯粒子濾波算法,通過CKF構造重要性密度函數,考慮了最新的量測信息,增加了有效粒子數,使得濾波精度明顯提高,同時本文算法在時間更新階段利用CKF來完成只對高斯分布參數的更新,減少了算法的計算量,使得算法具有更高的實時性。仿真結果表明,本文算法無論是濾波精度還是實時性,都有了一定的改善。
參考文獻
[1]GORDON N J,SALMOND D J,SMITH A F M.Novel approach to nonlinear/non-Gaussian Bayesian state estimation[J].IEE Proceedings F Radar and Signal Processing, 1993,140(2):107-113.
[2]ZHOU S K,CHELLAPPA R,MOGHADDAM B.Visual tracking and recognition using appearance adaptive models in particle filters[J].IEEE Trans.on Image Processing,2004,13(11):1492-1506.
[3]SABUNCE M,DEMIREKLER M.IMMPF for increased performance for maneuvering target[J]. IEEE on Signal Processing and Communications Applications Conf. Antalya:IEEE,2011:1044-1047.
[4]BANANI S A,VAUGHAN R G.Blind channel estimation and discrete speed tracking in wireless systems using independent component analysis with particle filtering[J].IET Communications,2012,6(2):224-234.
[5]李良群,姬紅兵,羅軍輝.迭代擴展卡爾曼粒子濾波器[J].西安電子科技大學學報:自然科學版,2007,34(2):233-238.
[6]QI C,BONDON P.A new unscented particle filter[C].IEEE International Conference on Acoustics,Speech and Signal Processing,2008:3417-3420.
[7]袁澤劍,鄭南寧,賈新春.高斯厄米特粒子濾波器[J].電子學報,2003,31(7):970-973.
[8]LI T C,CORCHADO J M,BAJO J,et al.Effectiveness of Bayesian filters: an information fusion perspective[J]. Information Sciences, 2016, 329: 670-689.
[9]李天成,范紅旗, 孫樹棟.粒子濾波理論、方法及其在多目標跟蹤中的應用[J].自動化學報,2015,41(12): 1981-2002.
[10]UNEY M,CLARK D E,JULIER S J.Distributed fusion of PHD filters via exponential mixture densities[J]. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 521-531.
[11]KOTECHA J H,DJURIC P M.Gaussian particle filtering[J]. IEEE Transactions on Signal Processing, 2003, 51(10):2592-2601.
[12]鄭作虎, 王首勇.一種基于GHF 的高斯粒子濾波算法[J].控制與決策,2014,29(9):1698-1702.
[13]ARASARATNAM I,HAYKIN S.Cubature Kalman Filters[J]. IEEETransactions on Automatic Control ,2009,54(6):1254-1269.
