基于FPGA的圖文打印機卷紙張力控制設計與實現
2017-05-09 03:22:27楊德偉張文源林炳宏
電子設計工程 2017年1期
關鍵詞:系統
楊德偉,張文源,林炳宏,楊 菲
(1.蘭州理工大學 電氣工程與信息工程學院,甘肅 蘭州730050;2.工正集團有限公司 浙江 溫州325105;3.蘭州理工大學 機電工程學院,甘肅 蘭州730050)
基于FPGA的圖文打印機卷紙張力控制設計與實現
楊德偉1,2,張文源2,林炳宏2,楊 菲3
(1.蘭州理工大學 電氣工程與信息工程學院,甘肅 蘭州730050;2.工正集團有限公司 浙江 溫州325105;3.蘭州理工大學 機電工程學院,甘肅 蘭州730050)
針對圖文打印機中卷紙張力的變化對打印質量的影響,對系統張力數學模型進行分析,采用微控制器FPGA以及外圍控制電路設計適合噴墨打印機的閉環張力控制系統,給出了系統硬件設計和軟件設計方案,對模糊PID控制模塊進行設計和仿真,并且對比了常規PID和模糊PID的階躍響應。系統具有響應速度快、精度高、控制簡單等特點,并具有模糊PID控制算法,適合噴墨打印機的張力控制,降低了制造成本,滿足系統的控制要求。
張力控制;FPGA;閉環控制;模糊PID
圖文打印機是將墨滴以噴墨的方式滴在卷紙上[1],通過卷紙分切,打印出不定長度的完整工程圖紙。圖文打印機工作過程中,牽引輥帶動卷紙進行打印,牽引輥輸出的轉矩要克服供紙系統的慣性,將卷紙送入到打印區域。當卷紙慣性轉矩過大,啟動打印過程中牽引輥的輸出轉矩不能克服供紙系統的慣性時,就會出現卷紙打滑或卷紙斷裂現象;打印結束時,卷紙的具有一定的慣性,會造成卷紙的冗余現象,影響打印機的打印質量。在打印機工作過程中,為了克服這種現象的發生,必須保證打印卷紙在打印過程中恒張力運動[2],提高打印機的打印質量。
市場上的張力控制系統,采用磁粉離合器和磁粉制動器分別控制收卷和放卷機構,實現放卷和收卷張力的控制[3];圖文打印機只有放卷機構,控制方法不同于市場上張力控制系統的控制方式,控制精度以及安裝尺寸的要求等;所以市場上的控制系統不合適圖文打印機張力控制。
系統采用EP1C6Q240C8型FPGA作為主控芯片,通過控制磁粉制動器和伺服電機實現對卷紙張力的控制,系統采用模糊PID控制算法,相對于普通PID控制具有很好的動態特性[4],該系統具有外圍電路設計簡單,響應速度快,控制精度高,較強的魯棒性,低功耗、低成本的特點,具有很好的實用性。
1 系統張力的結構
圖文打印機的張力控制系統由微控制器FPGA以及外圍控制電路構成。首先,設置適合卷紙張力的范圍值,通過張力檢測機構將張力值送入FPGA進行偏差計算,模糊PID控制算法對對偏差進行計算和處理,控制張力執行機構,控制卷紙張力的變化,實現系統的快速響應。
圖1所示為圖文打印機卷紙張力控制結構,系統有牽引部分和制動部分組成。牽引部分由直流步進電機構成,完成對打印區域卷紙的牽引;制動部分由交流伺服電機和磁粉制動器構成,完成對紙卷的驅動和制動。兩部分結構利用卷紙成為一個整體。牽引電機主要產生一個正向的轉矩,實現對卷紙的牽引,送入打印區域。驅動電機產生一個正向的驅動轉矩,實現系統的平穩啟動;磁粉制動器產生一個反向的制動轉矩[5],使卷紙保持一定的張力,平整送入打印區域。
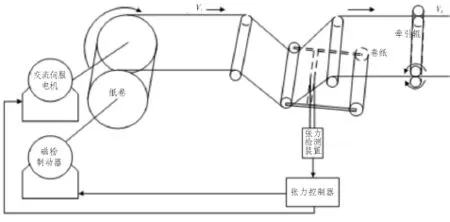
圖1 圖文打印機卷紙張力控制結構
打印機工作過程中,紙卷半徑和轉動慣量是實時變化的,為了能夠使系統穩定的工作,應該使卷紙的線速度和張力保持恒定,所以卷紙張力的控制要求為如下幾點[6]:1)打印機正常工作時,要保持卷紙張力的恒定,磁粉制動器則工作在線性區域;2)打印機工作時,隨著卷徑的減小,為了維持張力的恒定,磁粉制動器的制動轉矩也隨之變化;3)在打印機工作過程中對張力進行實時檢測,形成閉環系統,提高系統的控制精度。
圖2為卷紙機構的簡化圖,令T為卷紙的張力,紙卷直徑D2,半徑為,打印速度為V2紙卷放紙速度為V1,由胡克定律可得:

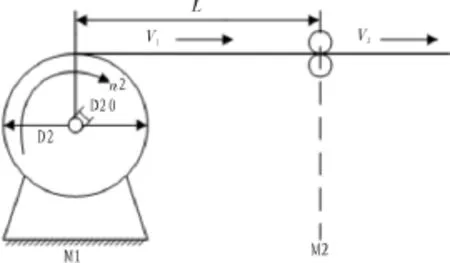
圖2 卷紙機構的簡化圖
1)式中:σ為卷紙的彈性模量;ε為卷紙的橫截面積;L為傳動距離,t為時間。由上可得,卷紙的張力是一個積分環節,系統啟動過程中保持V2>V1,才能使得卷紙有一定的張力,系統穩定后調節V1,使系統張力穩定[4]。
根據張力模型的分析,當系統正常工作時,磁粉制動器工作在線性制動區域,則系統的運動方程為:

式(2)中:T為卷紙的張力,R為紙卷的半徑,Mc為磁粉制動的制動轉矩,M0為空轉矩,MW為驅動器器的動態轉矩。通過控制MW的輸出,實現對系統張力的控制,保證系統穩定工作。
2 張力系統的硬件實現
根據圖文打印機的張力控制要求,張力控制系統包括:控制模塊、通信模塊、檢測模塊、執行模塊以及電源模塊;控制模塊由微控制器FPGA以及存儲單元構成;檢測模塊由光柵傳感器和光電編碼器構成;執行機構由磁粉制動器和伺服電機構成。
系統驅動板硬件框圖如圖3所示。
Altera公司的Cyclone系列是可編程邏輯器件中比較盛行的芯片,此芯片邏輯運算處理速度快,最高工作頻率可達400 MHz,工作電壓為3.3 V、1.5 V,輸入輸出為TTL邏輯電平,控制簡單,程序上易于實現。 系統使用 Altera公司的 Cyclone系列的EP1C6Q240C8型號芯,芯片具有5980邏輯門,工作頻率支持33~66 MHz,具有兩個鎖相環,有豐富的I/ O口,芯片結構簡單,成本低,電路設計簡單。系統采用雙電源供電模式,首先系統需要外接直流5 V和24 V電源進行供電;其次,5 V電源通過電壓轉化芯片AS1117/3.3和AS1117/1.5將5 V轉換成3.3 V,3.3 V轉換成1.5 V對FPGA進行供電,最后,將24 V電源經過簡單三極管和穩壓二極管的設計轉換成15 V電壓供芯片使用。
張力控制系統通過串口通信的方式與上位機進行通信,主要傳送卷紙長度信息以及系統反饋到上位機的數據信息。系統設計采用RS232通信方式;串口通信模式只有接收(RX)和發送(TX)兩根數據線,8 bit數據傳輸方式,波特率為9 600 bit/s;MAX3232芯片將串口發送的電平轉換成FPGA可處理的TTL邏輯電平,FPGA內部進行程序處理,實現系統與上位機的通信。
光柵傳感器通過檢測張力輥的位置信息對張力的值進行實時檢測,光柵傳感器將卷紙張力的值數字傳送到FPGA,FPGA進行偏差運算處理。光柵傳感器分辨率為200 DPI,5 V供電,精度為8位。市場上傳統的張力傳感器價格昂貴,設計電路復雜,外形尺寸等因素不合適噴墨打印機張力控制系統。卷紙長度采用光電編碼器進行計算和檢測,光電編碼器將長度數字信息傳送至FPGA,FPGA進行計算,并通過串口反饋至上位機,顯示打印完成,系統停止打印,整個打印過程是一個完整的閉環控制系統。
FPGA通過計算和處理光柵傳送到張力值信號,得出偏差值,通過模糊PID算法進行調整,輸出PWM控制信號至伺服驅動器和磁粉制動器,控制系統卷紙張力的恒定。伺服驅動器采用PWM的控制方式[7],為了保證系統抗干擾能力,電路設計采用RS422差分傳輸的方式,將PWM脈沖控制信號傳至伺服驅動器對電機進行控制。磁粉制動器采用勵磁電流進行控制,勵磁電流的大小決定磁粉制動器輸出的制動轉矩,磁粉制動采用24 V電源供電,FPGA輸出的 PWM控制波,通過 MOS管控制芯片TND37TD轉化成能夠控制MOS管的PWM開關信號對磁粉制動器進行控制[8],芯片TND37TD采用直流15 V供電,替代了原有的信號放大部分電路的設計,電路設計簡單,控制精確,低功耗,易于實現。
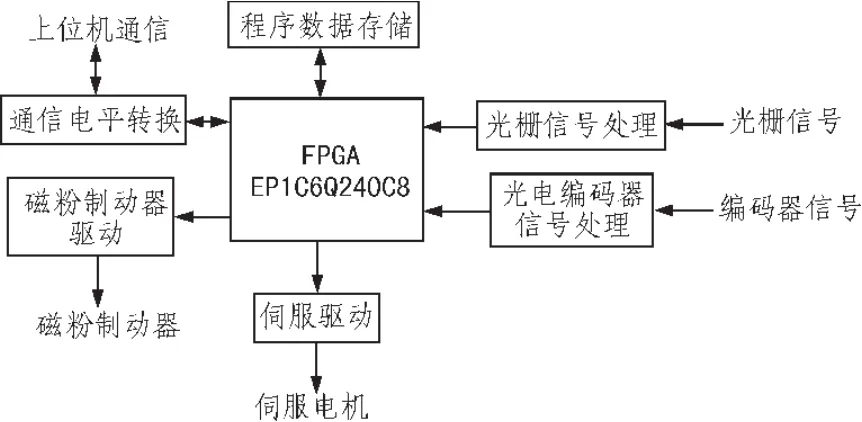
圖3 系統驅動板硬件框圖
3 張力系統的軟件實現
Altera公司的Cyclone系列的FPGA芯片,編程使用QuartusII軟件,QuartusII支持多種系列FPGA程序的編寫和綜合,在芯片配置和使用方面都便于操作。系統上電時,首先要對系統進行初始化,然后再接受各部分的信息進行處理和運算。
系統初始化結束后,系統狀態機不斷循環接受由上位機通過串口發送來的打印信息,當接收到打印信息時,系統進行打印,若無打印信息,系統繼續循環接收。在設計串口與上位機通信時,波特率設置為9 600 bit/s,在系統信息傳送過程中間采用異步FIFO作為緩沖區,調整系統的時序,保證系統傳輸信息的正確性。打印過程中,光柵傳感器實時將檢測信號送入FPGA,FPGA內部進行偏差和PID處理運算,并輸出PWM控制信號,通過控制張力執行結構保持系統張力的恒定。
根據圖文打印機張力的控制要求,系統采用帶死區的模糊PID算法[9],在張力值一定變化范圍內,系統不做出調整,當張力的值超出固定的范圍時,FPGA內部進行偏差計算和模糊PID調整,使系統保持穩定的狀態[10]。系統軟件流程如圖4所示。
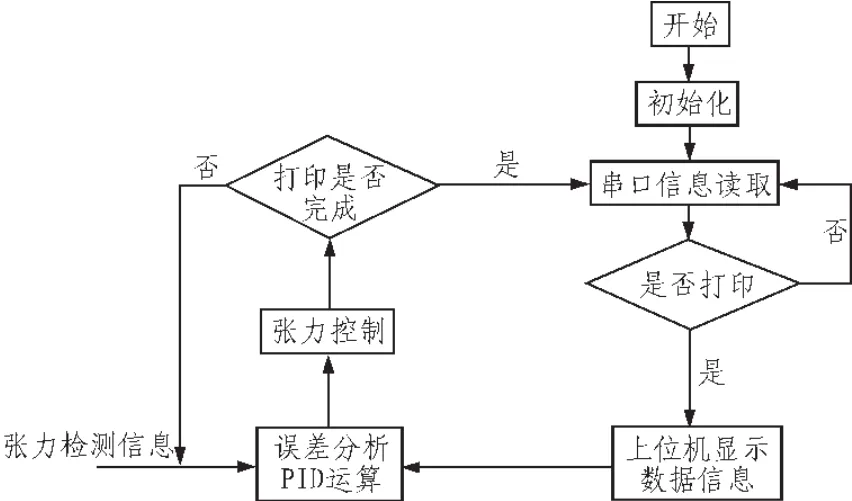
圖4 系統軟件流程
4 仿真結果
根據系統的控制要求,在QuartusII編譯環境下對系統進行軟件程序設計[11-12],圖5是系統的模糊PID模塊部分設計模塊。
Modulesim是第三方仿真軟件,通過編寫測試文件,對系統的模糊PID模塊進行功能仿真,仿真結果如圖6所示。
根據系統交流伺服電機的傳遞函數,實現對伺服電機的PID控制[13]。MATLAB中的Simulink仿真環境進行常規PID和模糊PID進行仿真[14-15]。通過比較常規PID和模糊PID階躍響應曲線,可知,模糊PID控制效果更佳。仿真結果如圖7所示。
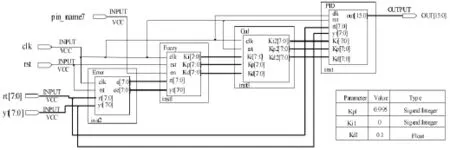
圖5 模糊PID模塊FPGA方框圖
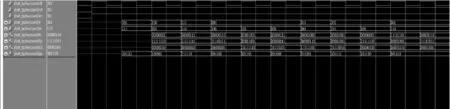
圖6 模糊PID模塊的功能仿圖

圖7 系統階躍響應下常規PID和模糊PID的Simulink仿真圖
通過階躍響應曲線可知,常規PID在響應初具有一定的超調,而且有不穩定的波動,模糊PID響應平穩,很快趨于穩定,達到預期設計效果。
仿真方法簡單、效果直觀、可視化程度高,具有一定的工程意義和實用價值。
5 結 論
基于FPGA的圖文打印機卷紙的張力控制系統,在硬件設計上結構簡單,低功耗,低成本,取代了原始的電路設計方法。首先,通過分析研究圖文打印機張力的控制模型,得出系統的控制方法和手段;其次,采用FPGA主控芯片及其外圍電路輔助設計控制系統硬件,設計具有低功耗,低成本的特點;再次,在QuartusII和MATLAB環境下設計模糊PID控制算法的實現,完成仿真。在QuartusII環境下設計模糊PID運行穩定,能夠實現系統所需的功能,并通過在MATLAB的Simulink工具箱中對常規PID和模糊PID進行階躍響應仿真,常規PID具有明顯的超調現象,可以看出,模糊PID控制算法控制效果更優,提高了系統的魯棒性和實時性。
系統在圖文打印機中得到了很好的應用,通過在打印機上的應用可以得出,控制系統有很好的自適應能力,可以得出,控制系統在其他行業也能得廣泛的推廣。系統采用數字化張力信號檢測和采集,模糊PID進行誤差調整,系統運行穩定,控制精度高,魯棒性強,設計簡單,成本低,具有很好的實用性和參考價值。
[1]王樂.專用高速噴墨打印機噴頭驅動電路的設計與實現[D].西安:西安電子科技大學,2012.
[2]肖保平,單越康.一種實用恒張力控制系統的研究[J].中國計量學院學報,2006,4(17):277-280.
[3]Hue P Le.Progress and trends in inkjet printingtechnology[J].The Journal of Imaging Science and Technology,1998,42(1):49-61.
[4]鄧中華,郭應鋒.套色印刷系統中恒張力控制的研究[J].制造業自動化,2006,26(6):30-32.
[5]劉京亮,宋影,劉飛,等.磁粉制動器加載特性研究[J].航空精密制造技術,2013,2(49):52-56.
[6]陳躍華.冷連軋卷取機恒張力控制技術[J].冶金自動化2013,1(37):33-38.
[7]阮毅,陳伯時.電力拖動自動控制系統運動控制系統[M].北京:機械工業出版社,2009.
[8]石新春,楊京燕,王毅.電力電子技術[M].北京:中國電力出版社,2010.
[9]孫杰,李旭,谷德昊,等.高精確度鋁箔張力控制策略的研究與應用[J].電機與控制學報,2011,12(15):73-77.
[10]劉紹鼎,樊立萍,姜長洪.基于模糊規則參數自整定PID控制器的設計[J].微計算機信息,2007,23(10):50-52.
[11]王利,李向華.基于FPGA的模糊邏輯控制器的硬件實現[J].控制工程,2004,11(1):34-35.
[12]白瑞林,江呂鋒,王建.基于FPGA的模糊自整定PID控制器的研究 [J].儀器儀表學報,2005,26(8):833-837.
[13]丁鋒,屈明昌,林廷沂.交流位置伺服系統PID控制方法實現[J].電子機械工程,2003,19(1):52-54.
[14]劉金琨.先進PID控制MATLAB仿真[M].北京:電子工業出版社,2004.
[15]王丁磊,馮冬青.基于模糊控制的PID參數的整定[J]安陽工學院學報,2006(1):15-18.
Graphic printer paper tension control based on the FPGA design and implementation
YANG De-wei1,2,ZHANG Wen-yuan2,LIN Bing-hong2,YANG Fei3
(1.College of Electrical and Information Engineering,Lanzhou University of Technology,Lanzhou 730050,China;2.GongZhengGroup,Wenzhou 325105,China;3.College of Mechanical and Electrical,Lanzhou University of Technology,Lanzhou 730050,China)
Aiming at the change of roll tension in graphic printer to print quality and the effect of tension mathematics model of the system were analyzed,and controlled by microcontroller FPGA and peripheral circuit design for inkjet printer closed-loop tension control system,system hardware design and software design scheme is given,and the design and simulation of fuzzy PID control module,and compares the general step response of PID and fuzzy PID.System with fast response speed,high precision,simple control and so on,and a fuzzy PID control algorithm,is suitable for the tension control ink-jet printer,reduces the manufacturing cost,satisfy the requirement of the system control.
tension control;FPGA;closed loop control;fuzzy PID
TN709
:A
:1674-6236(2017)01-0110-04
2015-12-10稿件編號:201512120
楊德偉(1988—),男,遼寧建昌人,碩士研究生。研究方向:智能自動化裝置。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32