基于Admas的經編機梳櫛機構的建模及運動仿真分析
2017-05-10 07:49:20張楊薛興國
中國設備工程 2017年8期
張楊,薛興國
(上海杉達學院滬東工學院,上海 200137)
基于Admas的經編機梳櫛機構的建模及運動仿真分析
張楊,薛興國
(上海杉達學院滬東工學院,上海 200137)
本文利用ADAMS軟件對經編機梳櫛機構整個運動過程進行模擬仿真和運動學、動力學分析,得到可視化的數據結果。由偏心連桿機構驅動實現梳櫛機構的上下擺動,得到梳櫛擺臂在不同運動條件下位移、速度、加速度的變化狀況,充分利用了ADAMS軟件的優勢,很好的展示了虛擬樣機開發產品的過程。
虛擬樣機技術;經編機;梳櫛機構;偏心連桿機構;動力學分析
1 經編機梳櫛連桿機構仿真模型的建立
對于課題基于ADAMS的凸輪—連桿組合機構的運功學分析,主要采用了經編機梳櫛機構的凸輪連桿的案例進行完整的設計及分析,其大致示意圖如圖1所示。
根據要求,經編機梳櫛結構的偏心輪機構可以簡化成AA0,AB兩個連桿機構A點繞著A0旋轉,從而使得整個連桿機構進行運動,最終使得梳櫛連桿進行擺動。
對于課題基于ADAMS的梳櫛機構的運動學分析,其梳櫛機構主要有偏心輪機構(主軸、偏心輪、偏心套、75mm連桿)、46mm連桿、40mm三孔連桿、梳櫛下拉桿等構成。其中主軸旋轉,偏心輪是主動件。
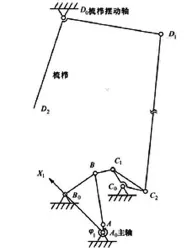
圖1 經編機的梳櫛連桿機構
2 梳櫛機構機構模型的建立
曲柄為偏心輪結構的連桿稱為偏心輪機構,也是四桿機構,如果曲柄長度很短,則在桿狀曲柄兩端裝設兩個轉動副將存在機構設計上的困難。而如果曲柄需安裝在直軸的兩支承之間,則將導致連桿與曲柄軸的運動干涉。因此將曲柄設計為偏心距為曲柄長的偏心輪。偏心輪機構中取偏心距23mm,偏心套150mm,連桿75mm。再建立三孔連桿與46mm連桿機構模型。梳櫛連桿DD0為300mm,梳櫛下拉桿DC2為562mm ,建立梳櫛下拉桿模型。最終可得ADAMS中完成的完整的二維實體模型,如圖2。
3 編機梳櫛連桿機構的運動學及動力學分析
3.1 添加運動副及驅動
運動副關聯兩個構件,并限制兩個構件之間的相對運動。在定義運動副時,一般都需要選擇兩個構件,即使在只選擇一個構件的情況下,也需將另一個構件默認為是大地(Ground),而且是第一構件相對于第二個構件運動。
在ADAMS/View中的運動分為低副(Joints)、高副(High Pair Constraints)和基本副(Joint Primitives)3類,通過添加,可得圖3。
在ADAMS/View中,在模型上定義的驅動是將運動副未約束的其他自由度做進一步約束,通過添加驅動,可得圖4。
4 運動學仿真和分析
在市場上的調研顯示,該種經編機電機最大輸出轉速為1000r/min,所以,設置添加在凸輪轉動副上的轉速為1000r/min。將其換算成ADAMS/ View旋轉驅動的單位:時間單位為秒(s)、角速度單位(deg)、即轉速為6000deg/s,輸入運動的位置參數表達式為6000d·time。
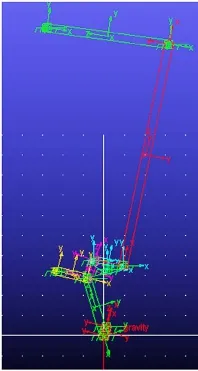
圖2
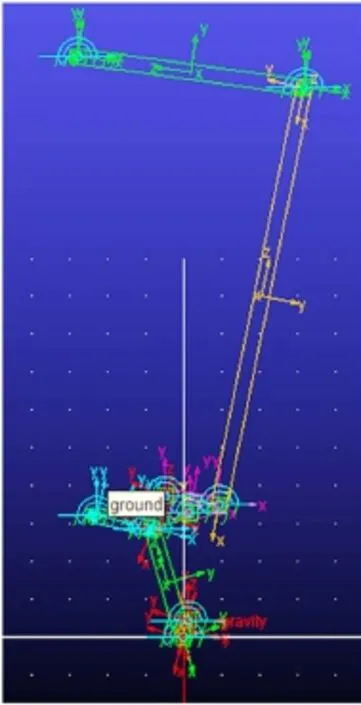
圖3
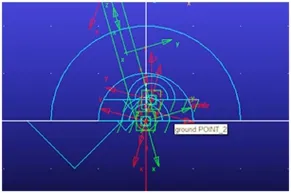
圖4
在機構進行計算之后,通過程序仿真,在ADAMS后處理中可獲得構件連桿AA0在轉速為1000r/min時,梳櫛連桿上的D點和D0點在Y方向上的相對位移仿真曲線、相對速度仿真曲線及相對運動加速度仿真曲線。
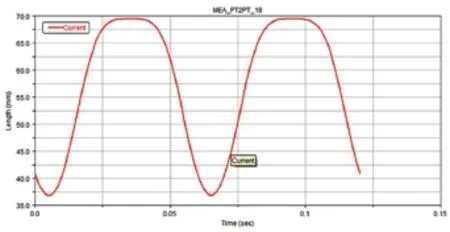
圖5 梳櫛連桿在Y方向上的相對位移圖
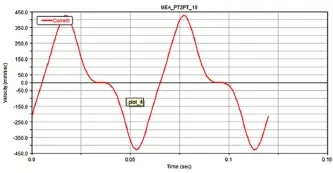
圖6 梳櫛連桿在Y方向上的相對速度圖
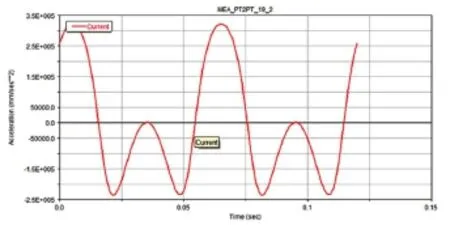
圖7 梳櫛連桿在Y方向上的相對運動加速度圖
由圖5~7可以看出,主動轉軸旋轉,梳櫛擺臂的運動規律如下:當主軸α=0o~28.8o,梳櫛擺臂的運動加速度由2.5934×105mm/s2逐漸增大,相對位移由Y=-40.98mm開始逐漸降低,直至α=28.8°,梳櫛擺臂將至最低位置。
當主軸α=28.8o~194.4o,梳櫛擺臂的相對位移逐漸增加至Y=69.44mm,期間梳櫛擺臂的加速度先減后增,當α=129.6°時最低,為2.3631×105mm/s2,相對速度先增后減,當α=93.6°時達到最高。
當主軸α=194.2°~223.2°,此時梳櫛擺臂有個停滯時間,相對位移基本不變,相對速度也基本不變,只有加速度先增大后減小,當α=208.8°時加速度為0。
當α=223.2°~360°,梳櫛擺臂的相對位移不斷減小至初始位置,相對速度先減小后增大,當α=331.2°時減小是最小值,加速度先減小后增大,當α=288°時加速度減小至最小值2.3631×105mm/s2。
[1]梁德本,葉玉駒.機械制圖手冊[M].北京:高等教育出版社,1997.6[5]鄭建榮.ADAMS——虛擬樣機技術入門與提高[M].北京:機械工業出版社,2001.11.
[2]W-Tung Chang,Long-IONG Wu.Mechanical Error Analysis of Disk Cam Mechanisms with a Flat-Faced Follower.Journal of Mechanical Science and Technology. vol.20,No.3,pp.345-356,2006.
[3]王永廉.材料力學[M].北京:機械工業出版社,2008.7.
[4]韓寶菊,徐劍波.基于ADAMS的凸輪機構設計與仿真[J].機械工程師,2007(1):91-92.
TS183.3
A
1671-0711(2017)04(下)-0087-02