自由設站起算點可用性的兩步判斷法研究
2017-05-10 06:47:34劉冠蘭黎建洲柏文鋒
測繪通報 2017年4期
劉冠蘭,黎建洲,柏文鋒
(1. 武漢大學測繪學院,湖北 武漢 430079; 2. 精密工程與工業測量國家測繪地理信息局重點實驗室,湖北 武漢 430079; 3. 廣州地鐵設計研究院有限公司,廣東 廣州 510010)
自由設站起算點可用性的兩步判斷法研究
劉冠蘭1,2,黎建洲1,2,柏文鋒3
(1. 武漢大學測繪學院,湖北 武漢 430079; 2. 精密工程與工業測量國家測繪地理信息局重點實驗室,湖北 武漢 430079; 3. 廣州地鐵設計研究院有限公司,廣東 廣州 510010)
目前在地鐵隧道結構變形監測中通常采用自由設站極坐標的測量方式,起算點準確是保證監測結果有效性的關鍵。地鐵隧道監測自由設站起算點數量有限,當多點存在變動時通常難以準確判定各點的可用性。本文針對自由設站已知起算點的可用性問題,采用坐標系轉換求解各已知點的位移分量完成可用性判斷。重點關注坐標系轉換關系的求解,提出了兩步法的求解思路:采用RANSAC算法計算初值,然后進行迭代權估計計算得到最終結果。最后通過現場實測和模擬測試的方式驗證了該算法的探測能力。
自由設站;起算點可用性;抗差估計;RANSAC算法
目前在地鐵隧道結構變形監測中,通常采用自由設站極坐標的方式對布設在變形區域斷面上的監測點進行周期性觀測[1]。受地鐵隧道空間環境的制約及工程等其他因素的干擾,布設在“遠離變形區域”的已知起算點的準確性通常無法保障[2-4]。而用于自由設站的已知起算點的準確性是保證數據處理時測站信息和所有監測點的變形信息準確的關鍵。因此需要在每次自由設站計算測站信息的同時對已知點的可用性進行檢驗。自由設站通常采用間接平差求解未知測站信息,平差求得的點位精度中包含了已知點與觀測精度的影響[5-6]。通過自由設站求得的測站點位精度和觀測值改正數等信息可以初步判斷已知點組中是否存在被破壞點。但是對具體被破壞點的定位相對困難,尤其是當多點存在變動的情況下,需要進一步的分析。
1 基于坐標系轉換的起算點可用性判斷
當已知起算點中存在變動點時,各起算點構成的網形發生了變化。起算點可用性判斷的目的是通過自由設站的觀測數據定位出點位發生變動的一個或多個起算點。如果采用含有錯誤起算點的觀測數據進行平差計算,得到的測站點位與實際點位存在差異,此時根據觀測數據反算得到的各已知點坐標均存在變化。可以認為穩定點組中的點在不同周期測量時發生的坐標變化,主要是由兩期測站坐標系的改變引起的,穩定點組的相對位置關系在不同周期并不會發生變化。因此可以通過計算不同期的測站坐標系之間的轉換關系,將某監測周期時刻的已知起算點坐標轉換到初始期測站坐標系下,得到兩期觀測時刻各起算點的位移,再通過假設檢驗等方法完成已知點的變化判斷。
基于坐標系轉換的起算點可用性判斷算法的關鍵在于計算出準確的坐標系轉換關系。考慮到不同時期觀測測站坐標系的Z軸均垂直于水平面,因此選擇五參數的坐標系轉換模型,具體包括坐標原點在X、Y、Z3個方向上的平移ΔX、ΔY、ΔZ,坐標系繞Z軸的旋轉角α及尺度參數k。通過含有變動點的已知起算點坐標計算兩期測站坐標系之間的轉換關系,可以將變動的已知點看作粗差。文獻[7—8]針對觀測向量同時存在隨機誤差和粗差的情況采用整體最小二乘算法完成三維坐標系的轉換。文獻[9—10]利用最小二乘平差后的方差,采用方差比值檢驗的方法,實現坐標系轉換計算過程中的粗差定位。本文主要針對迭代估計法受初始平差結果影響大的問題,采用兩步法實現坐標轉換關系的解算。首先選擇魯棒性強的算法進行轉換關系初值的計算,然后采用迭代權估計法迭代計算得到最終的轉換關系,最后通過準確的坐標系轉換后的各點變化結果完成已知點的可用性判斷。
2 起算點可用性兩步法判斷流程
隨機抽樣一致性(RANSAC)算法是根據一組包含異常數據的樣本數據集,計算數據的數學模型參數得到有效樣本數據的算法,最早由Fischler和Bolles提出[11]。該方法通過隨機抽樣和迭代運算求取最優結果,能夠避免粗差觀測值的干擾,對錯誤率超過50%的觀測數據仍能夠處理[12-13],在遙感圖像處理中應用廣泛[14-15]。本文采用RANSAC算法計算坐標轉換關系初值,然后采用迭代權估計法迭代計算得到最終的轉換關系。具體的坐標轉換算法如下:
(1) 讀入已知的N個基準點坐標,將坐標初值(X0i,Y0i,Z0i)(i=1,2,…,N)作為基準。讀取第k期自由設站觀測數據,計算測站坐標系下該期觀測各基準點坐標(Xki,Yki,Zki)。
(2) 采用RANSAC算法計算基準坐標系與第k期測站坐標系的五參數(ΔX、ΔY、ΔZ、旋轉角α及尺度參數k)轉換關系,將求得的坐標轉換關系作為初值,同時計算坐標轉換的各觀測值的殘差和單位權中誤差。
(3) 選擇定權函數,給每個基準點賦予權值重新進行平差計算求得坐標轉換參數,以及坐標轉換各觀測值的殘差和單位權中誤差。
(4) 迭代進行步驟(3),直至單位權中誤差變化小于給定閾值。
完成坐標轉換后得到各觀測點在兩期觀測時刻的位移分量(dx,dy,dz),它們反映了各起算點與給定坐標的變動。采用限差法對觀測點的可用性進行判定,以完成坐標轉換后的兩期已知起算點的點位位置作比較,如果某點的位移分量小于其極限誤差量,則認為該點起算數據是準確的。一般檢驗式為
(1)

3 實例分析
為驗證本文算法,選擇廣州地鐵七號線內某測站,對其兩側的9個起算基準點中的部分點進行改裝。將目標棱鏡安裝在三維位移平臺上,通過專用的L型固定平臺將其固定在地鐵隧道斷面上,安裝時保持平臺的某一軸向與隧道走向基本平行。位移平臺采用的是北京北光公司生產的TMS202M三軸位移臺,它采用微分頭進行驅動,最小讀數為0.01 mm,分辨率為0.002 mm,擺動誤差<30″。測站與各已知起算點的點位分布如圖1所示。

圖1 測站及起算基準點位分布
將隧道走向設為X方向,垂直于隧道走向為Y方向,地面的鉛垂方向為Z方向。分別對單點(D245)、同側2點(D245,D353)、異側2點(D245,D251),以及3點(D245,D353,D251)施加不同方向的3、5、10 mm大小的位移,將通過可用性判斷算法的探測結果與人工施加的位移值進行比較,結果見表1。
從不同方案下的起算點可用性判斷結果可以看出,不論對于單點還是多點發生變動的情況,本文算法均能很好地對變動點進行探測。尤其是當變動點數量接近起算點數的40%時,本算法依然可以將變動點很好地探測出來。但是也可以看出,當變動點的位移較大(發生10 mm的位移)時,會出現誤判的情況,將本身未發生變動的點判定為不可用。這是由于地鐵變形監測時已知點數量不多,本算法在迭代計算坐標轉換關系的過程中,只是將疑似動點的權重減小并沒有直接剔除。當變動點位移量過大時,仍會對坐標轉換關系計算結果造成影響。
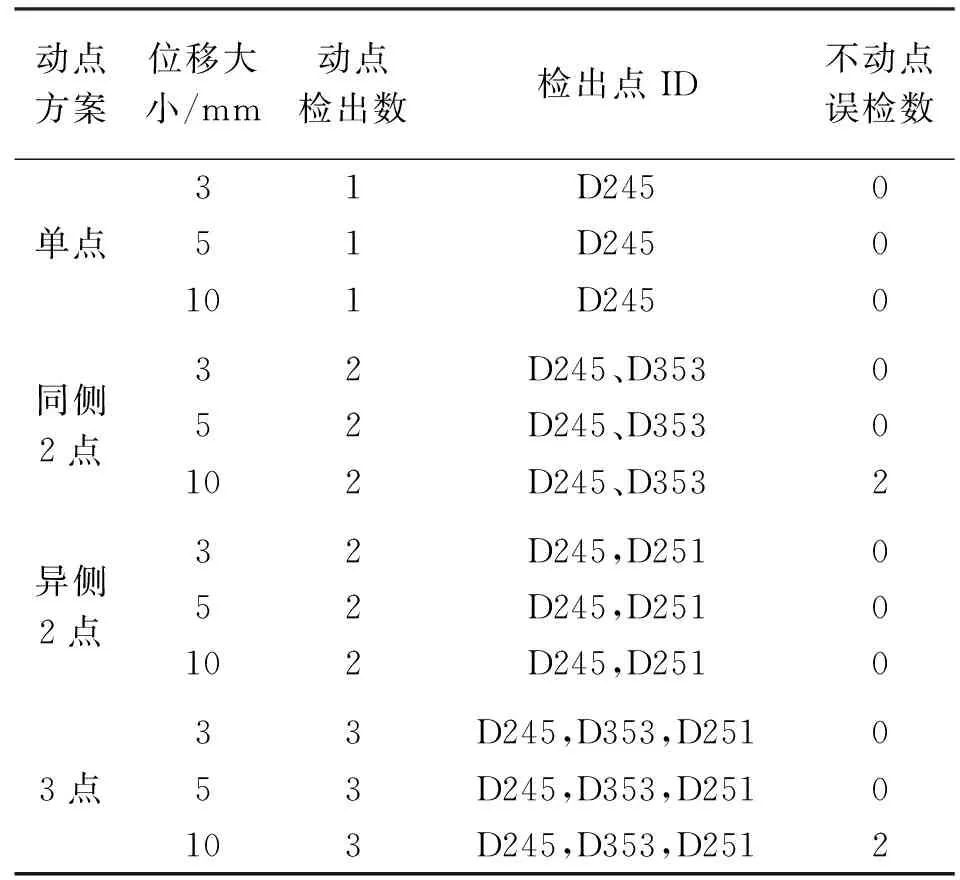
表1 不同方案下的已知點可用性計算結果
由于垂直于隧道的Y方向為隧道結構變形監測最為關注,因此對該方向的移動量和計算結果加以詳述,見表2。
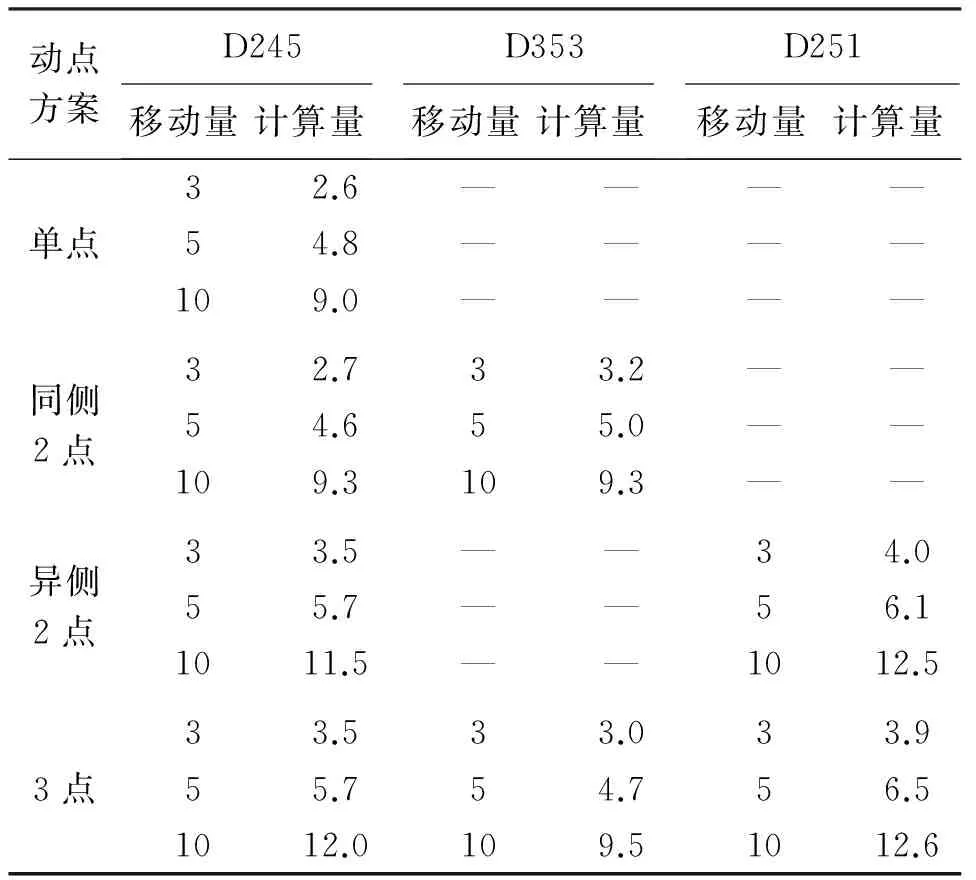
表2 不同方案下已知點Y方向位移計算差值 mm
從表2中可以看出,本文所述算法基本能夠準確探測出垂直于隧道方向的動點位移量,計算量與實際移動量相差在移動量的20%以內的探測率成功為75%,計算量與實際移動量相差在0.5 mm以內的探測率為45.8%,計算量與實際移動量相差在1 mm以內的探測率為75%。
為提高樣本量,采用重復的隨機模擬測試對本文算法進行驗證。給定20期某測站實測數據,該測站實測已知點數為8,編程隨機選取某期中的一點或兩點加入-5~5 mm的隨機位移,并采用大量隨機重復試驗的方法統計其能夠正確檢出的次數與該類型樣本總數的比值。隨機重復試驗為500次,以動點被正確檢出同時無誤判點作為判斷標準,統計其能夠正確檢出的次數與該類型樣本總數的比值,用檢出率來表示。單點位移模式的統計結果見表3。

表3 單點位移模式的探測效果統計結果 (%)
兩點位移模式的統計結果見表4。
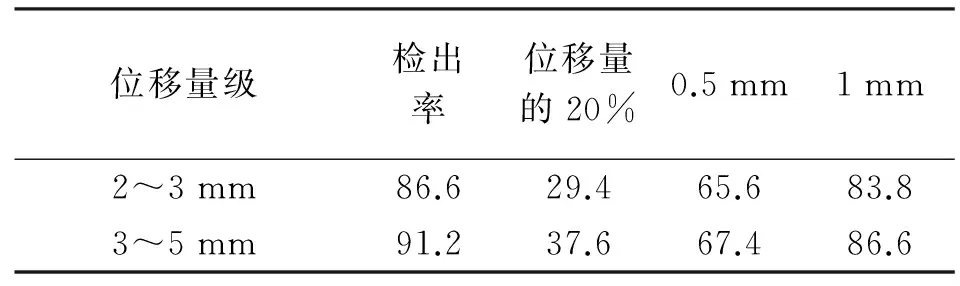
表4 兩點位移模式的探測效果統計結果 (%)
從統計結果可以看出,當已知點組中單點發生位移檢出率可達90%以上,計算的動點位移量與實際位移量之差在1 mm內的可以達到90%以上。若有兩點發生位移,檢出率約為80%~90%,計算的動點位移量與實際位移量之差在1 mm內的可以達到80%以上。經過進一步分析,發現兩點同時位移產生判斷錯誤情況的通常發生在兩點位于同側的情況,這也與實測結果吻合。
4 結 語
針對地鐵隧道變形監測中自由設站的已知起算點的可用性判斷問題,本文提出了一種基于坐標系轉換的分析方法。通過計算不同周期的測站坐標系之間的轉換關系,得到兩期觀測時刻各已知觀測點的位移以完成各點的變動探測。為解決含有粗差的坐標系轉換解算問題,采用魯棒性極高的RANSAC算法計算坐標轉換關系初值,該方法能在多點發生位移的情況下較好地探測出不可用的變動點。最后通過在廣州南站某在線監測項目的實地測試及一組大量重復的隨機模擬測試驗證了本算法的可靠性和實用性。
[1] 徐亞明,劉冠蘭,柏文鋒.顧及基坑施工影響的地鐵區間隧道結構卡爾曼濾波預報模型[J]. 武漢大學學報(信息科學版),2013,38(11):1322-1325.
[2] 張廣偉,李鵬,宮輝.城市地鐵控制網穩定性分析及應用[J].測繪科學,2008,33(4):98-99.
[3] 賈志強,邢衛民,范鵬程.地鐵運營監測基準網穩定性檢驗方法[J].測繪通報,2014(8):76-79.
[4] 孫立軍,劉興春,于興超.極坐標測量變形監測網穩定基準點組的檢驗[J].測繪地理信息,2009,34(3):25-26.
[5] 王慶,于先文.顧及已知點精度的自由設站算法及精度分析[J].東南大學學報(自然科學版),2009,39(2):372-376.
[6] 程效軍,繆盾.全站儀自由設站法精度探討[J].鐵道勘察,2008,34(6):1-4.
[7] 陳義,陸玨.以三維坐標轉換為例解算穩健總體最小二乘方法[J].測繪學報,2012,41(5):715-722.
[8] 方興,曾文憲,劉經南,等.三維坐標轉換的通用整體最小二乘算法[J].測繪學報,2014,43(11):1139-1143.
[9] 吳祖海,羅偉釗,李軍.坐標轉換中公共點粗差定位與降低粗差點影響方法研究[J].大地測量與地球動力學,2014,34(1):118-122.
[10] 周躍寅,潘國榮,孫海麗.坐標轉換解算中基于驗前中誤差的穩健估計[J].山東科技大學學報(自然科學版),2014,33(3):69-76.
[11] FISCHLER M A, BOLLES R C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography[J]. Communications of the ACM, 1981, 24(6):381-395.
[12] CAPEL D P. An Effective Bail-out Test for RANSAC Consensus Scoring[C]∥Conference on British Machine Vision. Oxford:[s.n.],2005.
[13] MAIN S J, CHUM O. Randomized RANSAC with Td,dTest[J]. Image & Vision Computing, 2004,22(10):837-842.
[14] Wong A, CLAUSI D A. ARRSI: Automatic Registration of Remote-sensing Images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007,45(5):1483-1493.
[15] 王密,常學立,朱映,等.光學影像自動幾何精校正中控制點粗差檢測方法比較[J]. 武漢大學學報(信息科學版),2014,39(12):1395-1400.
Two-step Method to Detect Unstable Known-points for Free Stationing
LIU Guanlan1,2,LI Jianzhou1,2,BAI Wenfeng3
(1. School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China; 2. Key Laboratory of Precise Engineering and Industry Surveying, National Administration of Surveying, Mapping and Geoinformation, Wuhan 430079, China;3. Guangzhou Metro Design & Research Institute Co.Ltd., Guangzhou 510010,China)
An analysis method to detect unstable known-points for free stationing is researched in the paper. Coordinate system transformation is used to get the known points’ displacements. Then the stability of each known point is obtained based on these displacements. To solve the accurate transformation relation, the RANSAC Algorithm is used to calculate initial value, final result is obtained by iteration. The validity of this method is verified by the field and simulation test.
free stationing; availability of known-point; robust estimation; RANSAC
劉冠蘭,黎建洲,柏文鋒.自由設站起算點可用性的兩步判斷法研究[J].測繪通報,2017(4):10-12.
10.13474/j.cnki.11-2246.2017.0109.
2016-08-30;
2017-01-05
湖北省自然科學基金(2015CFB501);中央高校基本科研業務費專項資金青年教師資助項目(2042015k0058)
劉冠蘭(1984—),女,博士,講師,主要研究方向為精密工程測量、工業測量。E-mail:glliu@sgg.whu.edu.cn
P21
A
0494-0911(2017)04-0010-03