Delta機器人運動優化的研究
2017-05-12 07:56:54熊倍華周磊梁佳楠
自動化與信息工程 2017年1期
關鍵詞:規劃
熊倍華 周磊 梁佳楠
(1.廣東省智能制造研究所 2.華南智能機器人創新研究院)
Delta機器人運動優化的研究
熊倍華1周磊2梁佳楠1
(1.廣東省智能制造研究所 2.華南智能機器人創新研究院)
軌跡規劃是設計Delta機器人末端執行器的運動軌跡,可保證Delta機器人高速、流暢和精準運動。以自主研發的Delta機器人樣機測試分析為基礎,研究末端執行器的運動軌跡。采用參數修正模式優化軌跡,獲得均勻平滑、周期短、沖擊弱的軌跡,提高了Delta機器人運行速度。
Delta機器人;軌跡規劃;參數修正模式
0 引言
Delta機器人已從最初的一種簡單機械裝置發展為自動化生產及智能制造的核心工業裝備,廣泛應用于食品、藥品和電子等行業。近年來,針對Delta機器人的研究倍受青睞,其中,運動空間的軌跡規劃是熱點之一。軌跡規劃是保證Delta機器人運動高速、精準和平穩的前提。
為獲得Delta機器人良好的動態性能,在運動軌跡控制層面,可將高副機構高速運行時的規律運用于Delta機器人的軌跡規劃,以提高機器人操作空間軌跡的連續性[1]。從數值分析的角度而言,在設計Delta機器人末端執行器運動形式時引入樣條曲線,操作空間的軌跡能保持連續[2]。此外,還可利用序列二次規劃方法將Delta機器人操作空間按三次樣條處理,同時對各矢量的變化進行一定的處理,也能使末端執行器獲得連續的運動軌跡[3]。
在運行速度較高的情況下,上述軌跡規劃方式均會引起較大的沖擊,使機構產生明顯振動,從而降低Delta機器人的定位精度。針對這個普遍存在的問題,本文以自主研發樣機的相關測試為基礎,構建運動修正曲線,規劃Delta機器人末端執行器運動軌跡,并通過實際作業測試,比較分析數據,實時修正,力求達到最佳連續且平滑的效果。
1 Delta機器人
Delta機器人屬高速、輕載的并聯機器人,其空間3自由度并聯機構精密、緊湊,驅動單元均布于靜平臺,具有剛度大、承載能力強、動態性能好且重復定位精度高等特性。Delta機器人樣機如圖1所示。

圖1 Delta機器人樣機
2 軌跡生成方式
在實際生產應用中,Delta機器人可對一定質量的物體實現快速抓取和放置。因此,末端執行器的軌跡只需完成點到點的運動。為滿足該要求,并保證中間過渡點的精度,本文Delta機器人樣機末端執行器的軌跡先依據作業空間建立運動軌跡的初始形態,再通過插值,建立軌跡函數,實時修正。軌跡范圍內若存在奇點,則需要考慮進去,包括其差異性和變化性,并且有必要根據其特征生成相關數據。
3 軌跡規劃
本文Delta機器人樣機末端執行器的加速度可達100 m/s2,速度可達10 m/s,驅動單元負載中的慣性項負載、速度項負載所占的比重大。因此,在Delta機器人運動控制中,為減小運動沖擊,末端執行器完成運動應至少具備以下2個條件:
1) 運動起始點和終止點的速度、加速度均為0;
2) 運動軌跡中間點的速度、加速度曲線均連續可導,躍度有界。
設機器人完成一段軌跡所需總時間為T,將加速度曲線用時刻Ti(i = 1, 2, 3, 4)分為5段:0~T1為修正加速過渡;T1~T2為勻加速階段;T2~T3為勻加速到勻減速的修正過渡;T3~T4為勻減速階段;T4~T為修正減速過渡至0。各時刻之間的關系滿足式(1)。

修正加速度曲線

其中,am為最大加速度。
對式(2)兩邊2次積分,由始末兩點的加速度為0且光滑連續可得軌跡的位移曲線,如式(3)所示。
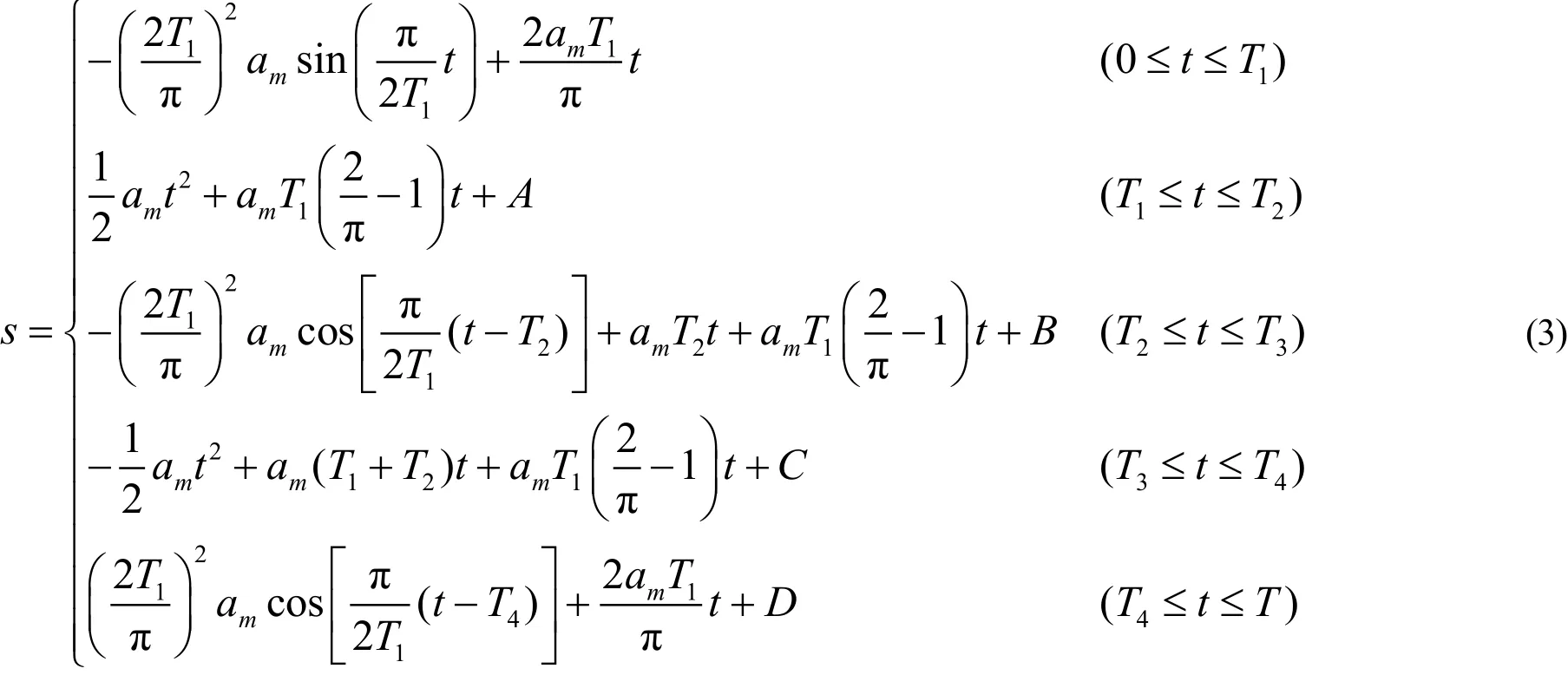

當t = T時,即可獲得在該時間段內的總行程,如式(4)所示。

為簡化處理,一般將行程均分為2段,前一段為加速階段,后一段為減速階段。

在T = 0.2 s,加速度曲線均分,且am= 100 m/s2時,通過參數修正模式進行軌跡規劃,得到對應的位移、速度、加速度和躍度軌跡如圖2所示。從加速度曲線可以看出,此規劃所引起的沖擊趨近于極小值,將其運用于Delta機器人末端執行器的軌跡規劃中,能改善運動軌跡,提升動態性能。


圖2 軌跡規劃
4 門型軌跡
Delta機器人一般用于抓放場合,其運動路徑與門的型式相仿,故稱之為“門型軌跡”或“門型路徑”,如圖3所示。對于該類型機器人,以特定的門型軌跡,完成一個來回所用的時間是衡量機器人工作性能的最重要指標之一。測試時通常取:P1P2= P3P4= 25 mm,P2P3= 305 mm。在完成一個門型軌跡之前,操作者只需給定P1、P4兩點,可采用示教方式,也可采用視覺方式給定[4]。Delta機器人控制系統據這2個點的坐標規劃出該門型軌跡,完成路徑的給定,其中高度P1P2、P3P4可根據實際情形自行設置或調整。
對于圖3所示的門型軌跡,在拐點P2、P3處,末端執行器的運動存在突變,使機構受到陣性沖擊,引起較大振動。因此,在該門型軌跡的拐點處,采用插值法,進行銜接處理,并通過最佳逼近,達到平滑過渡。經優化的門型軌跡如圖4所示,該軌跡一方面使運動的變化柔緩而避免突變,另一方面減少了末端執行器往返的行程,縮短了運動周期。門型軌跡的3段路徑,其距離可以相同,也可以不同,習慣標記為P1P2、P2P3和P3P4,可分別進行規劃。
圖4的說明如下:
1) 將水平運動軌跡的加速度ah、速度vh及位移sh和垂直運動軌跡的加速度av、速度vv及位移sv部分疊加,且兩者均須進行修正處理;
2) 設定P1P2運動時間為T1,P2P3運動時間為T2,P3P4運動時間為T3;
3) 記t = 0時為垂直上升運動P1P2的初始時刻,t = T1/2時為水平運動P2P3的初始時刻,t =T2+T1/2-T3/2時為垂直下降運動P3P4的初始時刻,P5為P1P2的中點,P8為P3P4的中點。P5P6、P7P8曲線段為垂直運動和水平運動的合成運動。

圖3 門型軌跡

圖4 經優化的門型軌跡
作業時,Delta機器人控制系統獲得目標點的位置后,處理器便根據當前位置與目標點位置建立一個豎直的虛擬平面X'O'Y',如圖5所示,通過式(3)生成目標點在X'O'Y'平面內的軌跡數據。此外,在需要的時候,還可以將不在X'O'Y'平面內的點,通過矩陣變換生成該平面內的坐標,如式(6)所示。

圖5 軌跡坐標變換

5 結語
Delta機器人的運動特點為非線性、高度耦合及隨時間不斷變化,這就使它的運動學正向求解研究一直以來是難點[5]。本文以Delta機器人末端執行器的運動及其運動空間為研究對象,在不受系統復雜性或外部擾動影響的情況下,通過參數修正模式進行軌跡規劃,獲得連續平滑的運動軌跡。經樣機測試,軌跡完成總時間T縮短至0.2 s,振動值趨近于極小。
[1] Afroun M, Chettibi T, Hanchi S. Planning optimal motions for a DELTA parallel robot[C]. 14th Mediterranean Conference on Control and Automation, 2006: 28-30.
[2] Hao Xiuqing, Sun Lei. Trajectory planning and simulation of a new symmetric parallel mechanism with three translational DOF[J]. International Conference on Measuring Technology and Mechatronics Automation, 2009(2): 424-427.
[3] 林仕高,劉曉麟,歐元賢.機械手笛卡爾空間軌跡規劃研究[J].機械設計與制造,2013,3(3):49-52.
[4] 霍偉.機器人動力學與控制[M].北京:高等教育出版社,2005.
[5] 肖南峰.工業機器人[M].北京:機械工業出版社,2011.
Research on Motion Optimization of Delta Robot
Xiong Beihua1Zhou Lei2Liang Jianan1
(1.Guangdong Institute of Intelligent Manufacturing 2.South China Robotics Innovation Research Institute)
Trajectory planning is to design the trajectory of the end effector of Delta robot, in order to ensure the high-speed, smooth and accurate motion of Delta robot. Taking the Delta robot prototype test and analysis as the foundation, conducts the research to the trajectory of the end effector. The trajectory is optimized by the parameter correction mode, which is not only uniform smooth, short period and weak impact, but also improve the running speed of Delta robot.
Delta Robot; Trajectory Planning; Parameter Correction Mode
熊倍華,男,1974年生,總工程師,主要研究方向:工業機器人、高速電主軸等。E-mail:xbh007@126.com
周磊,男,1982年生,博士研究生,主要研究方向:生產智能控制。E-mail:94718766@qq.com
梁佳楠,男,1989年生,碩士研究生,主要研究方向:機械制造工藝與設備。E-mail:561295016@qq.com
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
