PSO優化的六自由度機械臂全局快速終端滑模控制
2017-05-16 07:07:52王琥胡立坤譚穎
智能系統學報 2017年2期
王琥,胡立坤,譚穎
(廣西大學 電氣工程學院,廣西 南寧 530004)
PSO優化的六自由度機械臂全局快速終端滑模控制
王琥,胡立坤,譚穎
(廣西大學 電氣工程學院,廣西 南寧 530004)
針對六自由度機械臂控制系統,提出一種基于粒子群優化(PSO)算法的全局快速終端滑模控制方法,以更大程度地減小系統的抖振,提高系統的響應速度。對于機械臂多輸入多輸出的特點,為了方便設計,將系統劃分為6個二階子系統,對各個關節進行設計,分析克服控制律的奇異性,同時運用Lyapunov理論證明系統的穩定性,并基于PSO算法完成控制參數的優化。實驗結果表明:優化后的控制方法不僅可以提高系統的快速性,還可以明顯減小系統的抖振,使系統具有良好的動靜態性能。
自動控制技術;六自由度機械臂;李雅普諾夫理論;PSO算法;全局快速終端滑模;控制律;抖振
隨著德國工業4.0普及,機器人被廣泛應用在各個領域,成為國內外學者關注的熱點之一。其控制問題的解決方法已有很多,如文獻[1-4]提出的自適應魯棒控制和模糊PID控制等。滑模被廣泛應用在機器人控制、電機控制、航天發動機等方面。其原理主要為利用輸入的控制信號不斷做切換,使得系統不斷逼近預設好的滑模面,從而使誤差逐漸減小。文獻[5]提出了一種積分次優化的二階滑模,利用其在三自由度的工業機器人上的軌跡跟蹤,并與典型的PD控制器、次優化的二階滑模三者進行比較。文獻[6]利用非線性阻尼和終端滑模對機械手進行控制,使其穩定性得于提高;文獻[7]利用高階滑模對單自由度機械手進行控制;文獻[8]提出了融合自適應模糊算法和滑模,對機器人進行控制,提高了被控系統的魯棒性。然而,傳統滑模的控制機理是在不同的控制邏輯之間來回切換,因此,勢必存在時間滯后、空間滯后、系統慣性等因素,導致被控系統容易出現抖振現象。抖振的存在,使得系統狀態在平衡狀態之間來回切換,導致被控系統出現跟蹤誤差。工業機器人控制對于精確性有著嚴苛的要求,對于末端執行器的跟蹤誤差應達到工業要求,否則會降低被控系統的準確度。當跟蹤誤差過大時,甚至會激發高頻未建模態,使工業機器人處于不受控狀態。近年來,諸多學者針對抖振現象提出了不同的改進方法,從而有效的減小被控系統的抖振問題,主要包括趨近律方法,觀測方法,智能控制方法,動態滑模方法等。在人工智能迅速崛起的基礎上,大多的學者主要采用智能控制與不同形式的滑模相結合的控制方法,如文獻[9]提出的改進神經網絡自適應滑模控制;文章[10-11]采用基于智能算法(GA,PSO)的滑模控制。全局快速終端滑模是在傳統滑模的基礎上引入非線性函數,既保證了系統在有限時間內到達滑模面,又使得系統在有限時間內達到平衡點時,誤差可以快速收斂至零,達到全局快速收斂的目的。具有減小系統抖振,提高系統動靜態的優點。
為了提高系統的響應速度和減小系統抖振等動靜態性能,本文提出一種基于PSO優化的全局快速終端滑模的六自由度機器臂控制,分析與克服全局快速終端滑模的奇異性,給出了系統的響應時間,并通過仿真和實驗兩方面驗證該控制策略的準確性和可行性。
1 機械臂滑模控制系統
1.1 六自由度機械臂數學模型
利用Euler-Lagrange方法,不考慮外部未知干擾力作用,在關節坐標中建立六自由度機械臂的動力學模型如下:

(1)

(2)
由于六自由度機器人具有MIMO特性,為了實現對其控制的目標,將其分解成單關節的子系統,由式(2)可有
(3)
令
(4)
由式(3)、(4)可得單關節的角加速度為
(5)
式中Gi為i軸的重力加速度,i=1,2,…,6。
令:
則有
(6)
式中:f(x)、g(x)為R域中光滑的連續函數。
如式(6)所示的二階非線性方程即表示為六自由度機械臂的各個關節子系統。此法好處在于將六自由度機械臂模型轉換成相互獨立的子系統,方便后期的設計與優化。
1.2 滑模控制器設計
設單關節的常規全局快速終端滑模控制器的滑模面函數為
(7)
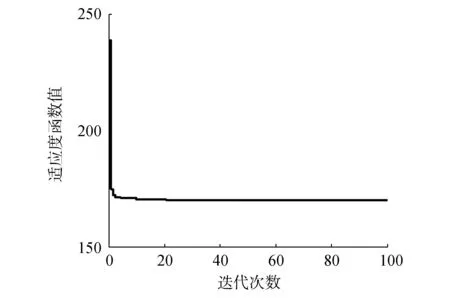
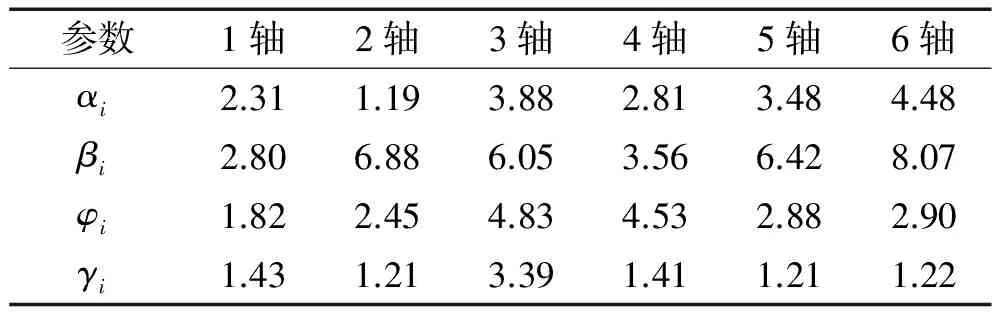
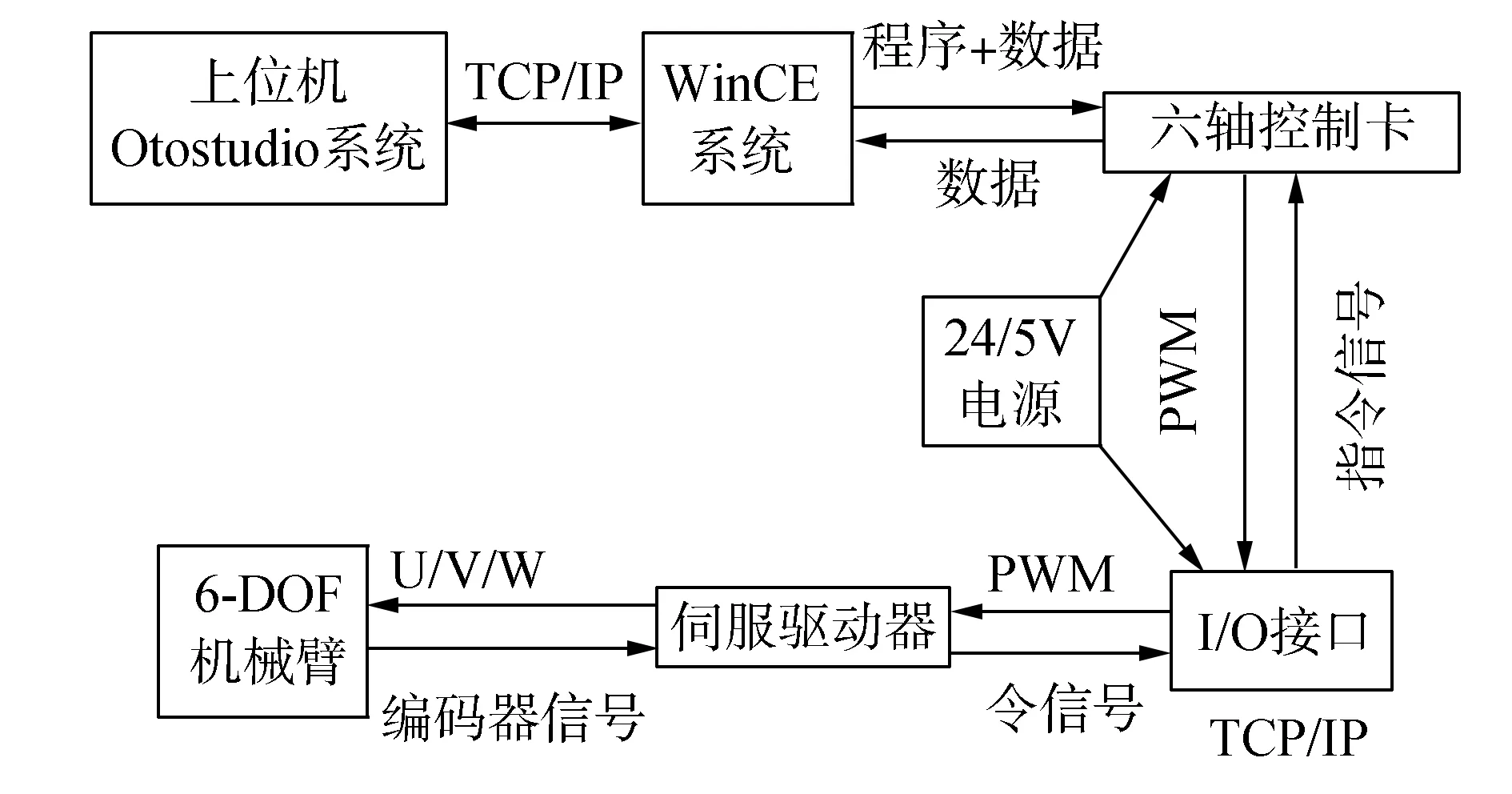
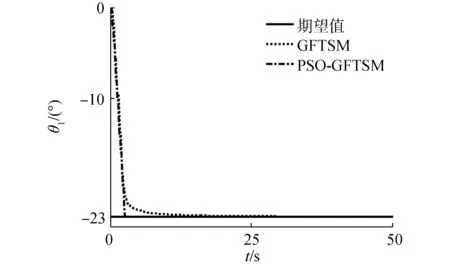
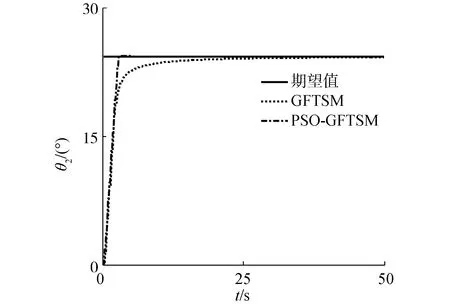
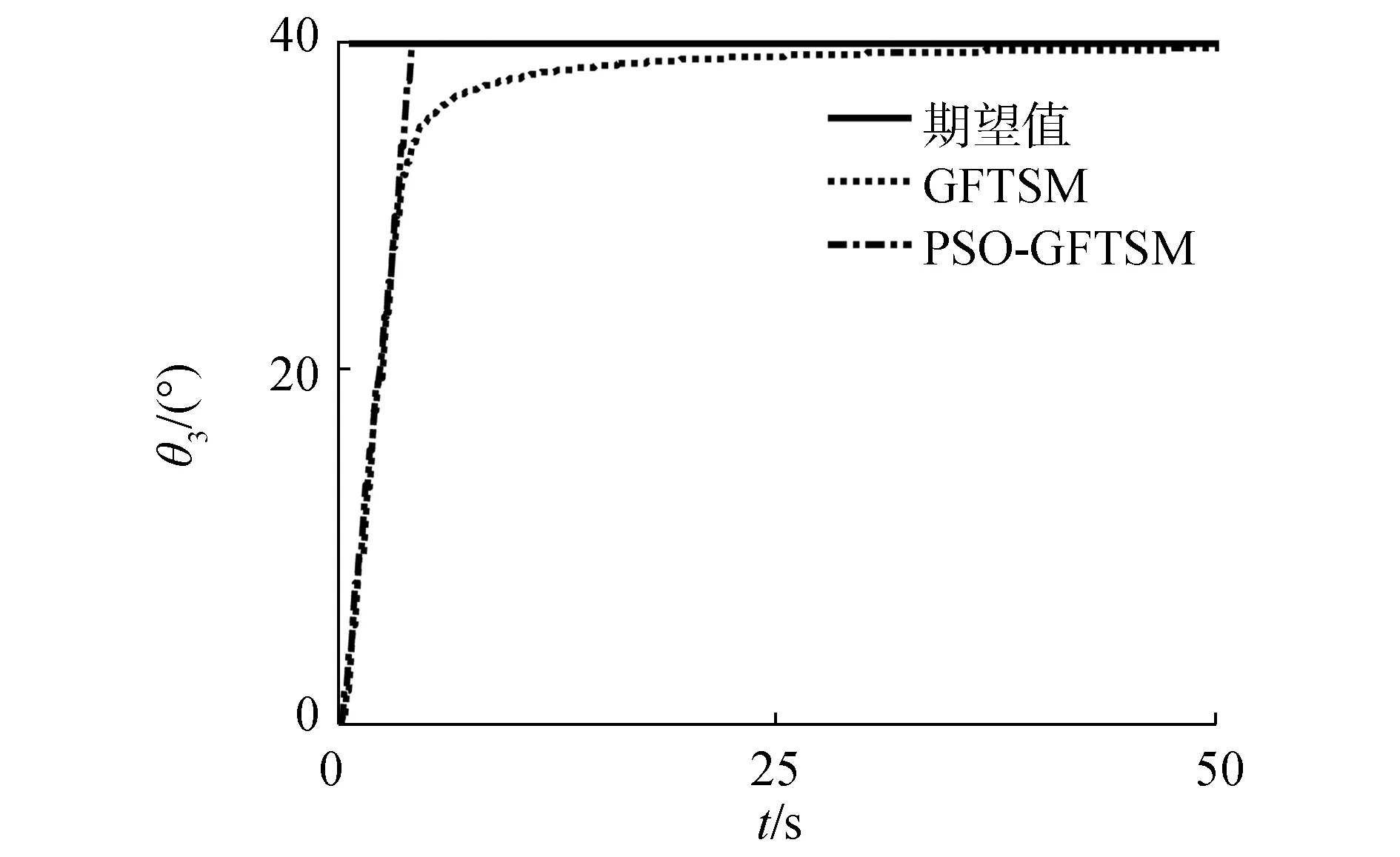
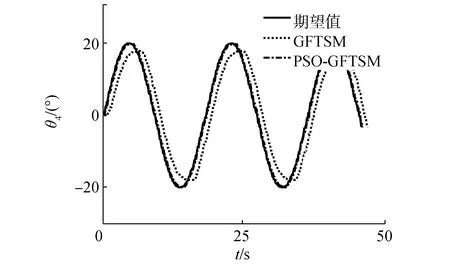
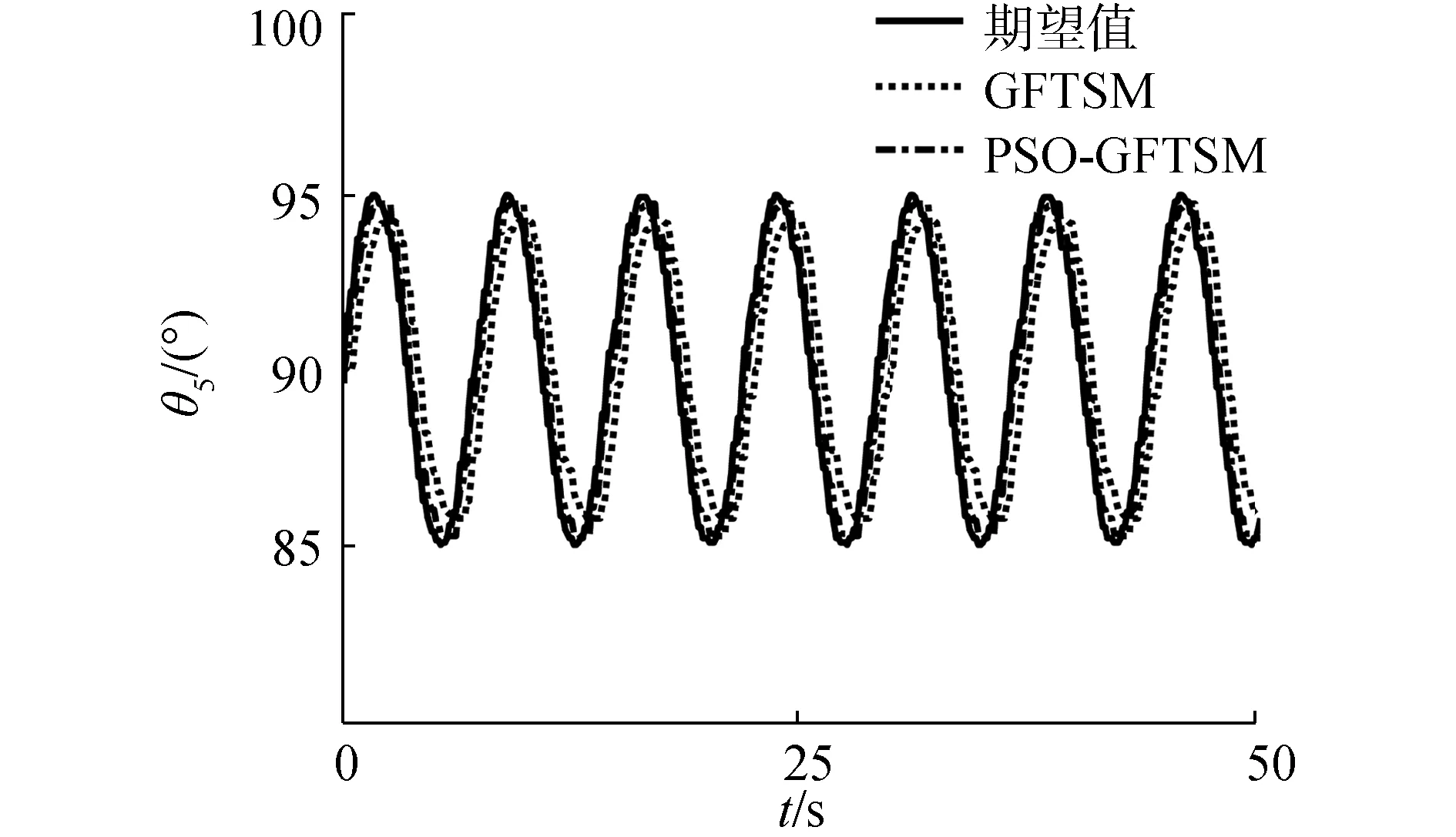
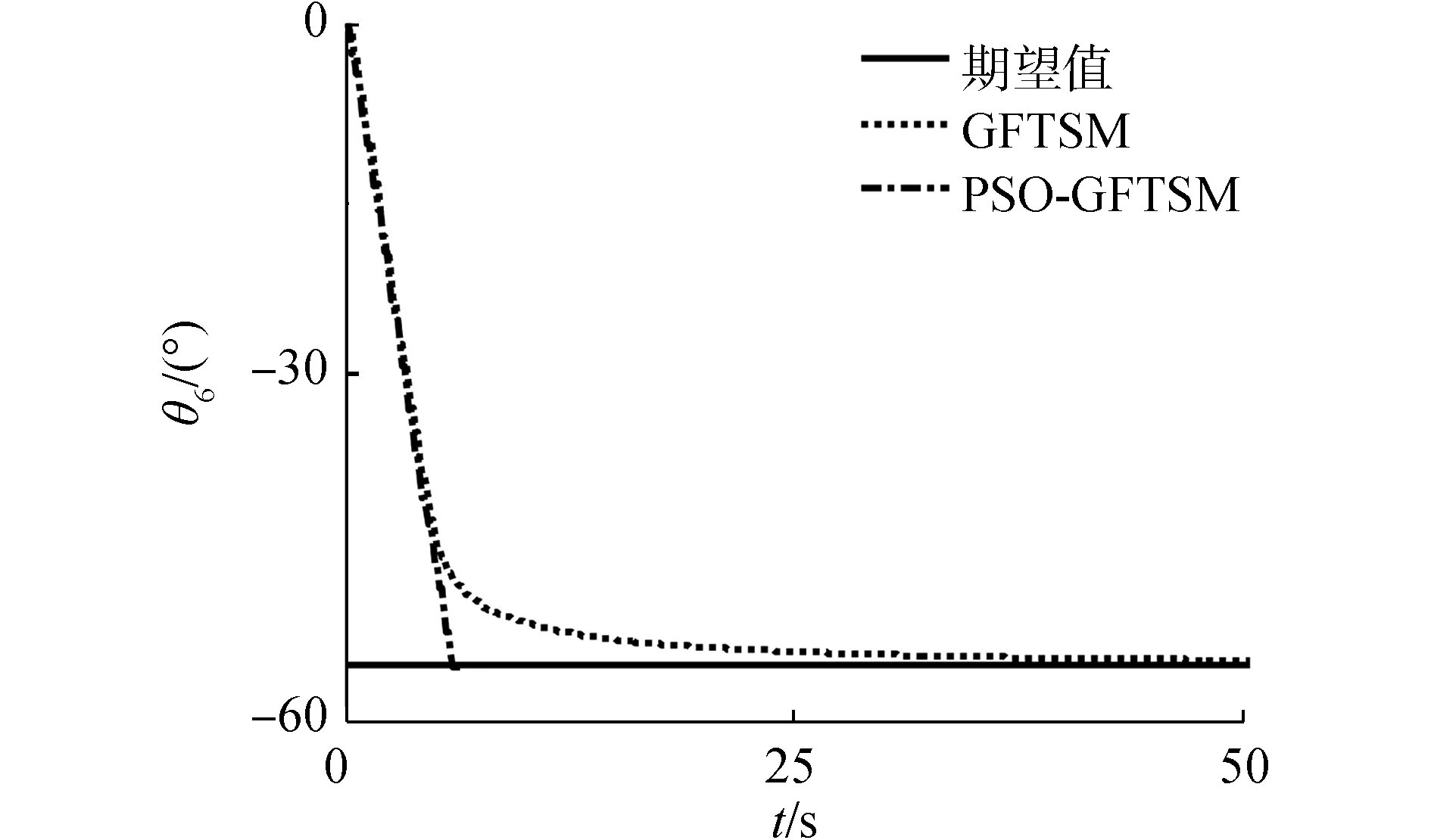
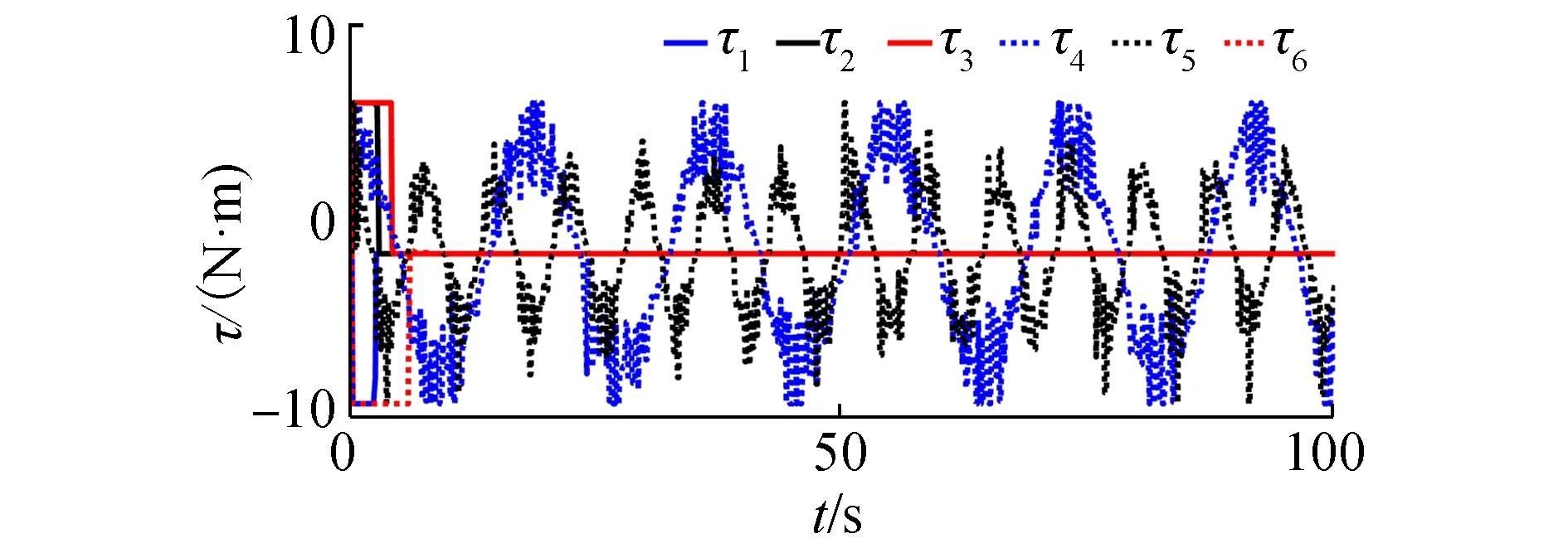
式中p (8) 由式(7)求導可得 (9) 由式(6)、(8)、(9)可得 (10) 故此選取位置控制規律為 (11) 式中h為指數趨近律,定義為 (12) 由位置控制律式(11)可知,當系統的狀態接近至設定值時,即e≈0之時,因為p-q/q<0,則ep-q/q接近于無窮大,及證明式(11)存在奇異問題。在實際的控制中,奇異的存在容易被控系統失調。為了克服奇異問題,選取滑模面為 (13) 同理,可得控制律為 (14) 通過解方程(7)si=0得,系統滑動模態上任意狀態ei(0)≠0至平衡狀態的時間為 (15) 通過解h(s)=0得,系統從狀態空間任意一點到達滑動模態上的時間為 (16) 由式(15)、(16)可知,單關節系統的響應時間由到達時間和滑模運動時間決定;時間參數與αi、βi、γi、φi4個參數息息相關,因此對于控制律參數的優化有重要的意義。 為了使滑模面在被控系統發生滑動模式,則必須滿足Lyapunov穩定性。證明如下。選取Lyapunov函數為 V=si2/2 (17) 則有 (18) 綜合式(7)、(8)、(13)、(14)有 PSO算法是Kennedy博士和Eberhart博士通過對鳥群覓食的集體協作行為的研究,于20世紀90年代首次提出的計算優化算法。該算法是基于群體迭代,追求解空間中的最優粒子,具有簡單易實現、收斂速度快、全局搜索能力強等優點,適用于科研以及工程應用。算法的搜索機制可描述為,以解空間中的任意一點為出發點,基于設定的適應度函數為個體最優解保留標準,通過群體的更新迭代,尋求出解空間中的最優解。假設,問題的解空間為D維,初始的粒子群體規模為n,以初始種群中的一點為尋求解的出發點,以適應度函數為評價標準,通過粒子迭代更新,尋求出個體極值以及全局最優值。粒子的迭代更新規則如下所示。 (19) 式中:k為迭代次數,ω為慣性權重,c1、c2分別為局部學習因子和全局學習因子。隨機數r1,r2∈[0,1]。p為個體極值,Si為當前整種群最優值。 基于PSO優化的全局快速終端滑模控制的六自由度工業機械臂系統如圖1所示。由圖1可知,以六自由度機械臂的各個關節的角度和其輸入的控制量作為PSO的輸入項,通過迭代優化,調整αi、βi、φi、γi參數,從而達到改善系統性能的目的。 圖1 基于PSO優化的全局快速終端滑模控制系統Fig.1 Controlled 6-DOF manipulator via PSO-GFTSM 為保證被控系統擁有良好的動靜態性能,同時防止系統控制量的輸出過大。因此,PSO優化的最小目標函數的參數選定為:誤差的絕對值的時間積分和系統控制量輸出的平方,參照文獻[13],單關節最優目標函數定為 式中:ω1、ω2、ω3為權重系數,ei(t)為i關節的跟蹤誤差,tiu為i關節上升時間。同時,為了避免超調對系統的影響,在優化函數中加入懲罰函數,即當系統出現超調σi時,改寫為 滑模最終的控制目標在于使系統響應快,超調小,因此,參照文獻[13],對于誤差、上升時間、超調、控制量的權重進行折衷選擇,文中取ω1=0.999,ω2=0.001,ω3=2.0,ω4=200。 3.1 仿真研究 為了驗證上述控制算法的準確性和可行性,基于上述建立的六自由度工業機械臂的動力學模型,按照圖1所示的框架圖,利用全局快速終端滑模對其各個關節進行PSO離線優化仿真。 問題解域的確定:由式(15)、(16)可知,系統狀態至平衡狀態的總時間為:t=ts+tr;系統的快速性主要由αi和γi決定,其值越大,快速性越強,同時,其值過大,輸出的控制量越大,過一定值可引發機械臂劇烈振蕩,而βi和φi可調節控制精度與抖振振幅。鑒于機械臂本身的力矩輸出受限,設定的控制量輸出范圍為:τi∈[-10,10]N·m。鑒于控制量的范圍,設置4個參數的解域為:αi,βi,φi,γi∈[0,10],PSO算法種群的數量為25,迭代的最大數為100。優化步驟采用單軸分別優化,即當前優化的軸輸入信號為階躍信號,其他軸輸入信號為0,直至優化機械臂的6個軸。單軸優化步驟為: 2)運行20s為一個周期,利用式(21)計算每個粒子的適應度,比較保存最優值; 4)根據PSO動力方程式(19)進行粒子的更新; 5)判斷是否達到終止條件(最大迭代步數或精度要求),若否,則進入2)繼續搜索。 經過6個軸的分別優化后,見實驗結果如圖2。 圖2 1號軸優化函數曲線Fig.2 Fitness curve of Joint 1 圖2表示的為一號軸(基座)的適應度函數值J收斂過程。由圖知,迭代至10次左右收斂。 經過PSO離線優化的終止條件,可得6個軸的滑模控制器的最優參數見表1。 表1 PSO優化滑模參數 3.2 實驗研究 實驗用的六自由度機械臂是由Googol公司生產,采樣周期為0.002 s。硬件平臺使用CPAC結構,CPAC可將PC機開放、靈活的軟件體系結構與PLC相結合,并實現了與DSP運動控制技術的無縫連接,上位機軟件為OtoStudio。整個系統的硬件結構組成如圖3。 圖3 CPAC硬件結構圖Fig.3 Structure of CPAC 為解決控制算法在上位機的實現難題,控制算法的角度、角速度等表示為 (22) 實驗結果圖4表明,優化后的全局快速終端滑模控制策略較之優化之前系統的上升時間更短,響應速度更快,兩者皆避免了超調現象的出現,減小了機械的來回摩擦造成的磨損。對于穩態階段如95~100s,圖4(a)~(c)和(f)的階躍響應表明,優化前的穩態誤差范圍為[0.05°,0.2°],優化后的穩態時刻,幾乎與設定值重合。圖4(d)~(e)的正弦跟蹤響應表明優化前跟蹤誤差范圍為[1.5°,4°],優化后的跟蹤誤差為[0.3°,0.6°]。在末端執行器軌跡中,通過運動學計算,優化前的誤差范圍為:[5.2-11.0]mm,優化后的誤差范圍為:[0.8,4.2]mm。因此,優化后的控制算法擁有響應速度快,無超調,跟蹤精度高的優點。 (a) θ1 (b) θ2 (c) θ3 (d) θ4 (e) θ5 (f) θ6 圖4 基于PSO優化全局快速終端滑模實驗結果Fig.4 Experimental result of PSO-GFTSM 由圖5、6可知,在接近設定值時,圖5仍有力矩在輸出,說明未優化的趨近速度較慢;在正弦跟蹤方面,優化后的調節速度快于優化前的速度。各軸的輸出力矩表明,各軸力矩并未在零附近來回切換,表明,此法可消除抖振。因此,優化后的滑模算法有利于工業機械臂實現快速準確定位,在物品搬運、零件裝備、點焊等方面有一定的優勢。 圖5 基于GFTSM各關節控制器輸出Fig.5 Control moment of each joint based on GFTSM 圖6 基于PSO-GFTSM各關節控制器輸出Fig.6 Control moment of each joint based on PSO-GFTSM 針對六自由度工業機械臂控制問題,考慮機械臂本身的MIMO特性,將其分解成單關節SISO系統,在全局快速終端變結構滑模控制的基礎上,分析并克服了全局快速終端滑模控制的奇異性,同時采用PSO優化其控制律參數。實驗結果表明:相比于優化前的滑模控制,基于PSO優化的全局快速終端滑模算法可以更加有效地減小被控系統的抖振問題,減小系統的上升時間,跟蹤誤差更小,可縮短滑模系統收斂時間,提高系統的動靜態性能。 [1]JASIMIF,PLAPPERPW.Stablerobustadaptivecontrolofroboticmanipulatorswithswitchedconstraints[C]//Proceedingsof2013IEEEInternationalConferenceonMechatronicsandAutomation.Takamatsu:IEEE, 2013: 755-760. [2]SHOJAEIK,SHAHRIAM.Adaptiverobusttime-varyingcontrolofuncertainnon-holonomicroboticsystems[J].IETcontroltheory&applications, 2012, 6(1): 90-102. [3]JAISWALNK,KUMARV.ComparisonbetweenconventionalPIDandFuzzyPIDsupervisorfor3-DOFScaratyperobotmanipulator[C]//Proceedingsof2014IEEEStudents'ConferenceonElectrical,ElectronicsandComputerScience.Bhopal:IEEE, 2014: 1-5. [4]CAPISANILM,FERRARAA,FERREIRADELOZAA,etal.Manipulatorfaultdiagnosisviahigherordersliding-modeobservers[J].IEEEtransactionsonindustrialelectronics, 2012, 59(10): 3979-3986. [5]FERRARAA,INCREMONAGP.Designofanintegralsuboptimalsecond-orderslidingmodecontrollerfortherobustmotioncontrolofrobotmanipulators[J].IEEEtransactionsoncontrolsystemstechnology, 2015, 23(6): 2316-2325. [6]JINYi,CHANGPH,JINMaolin,etal.Stabilityguaranteedtime-delaycontrolofmanipulatorsusingnonlineardampingandterminalslidingmode[J].IEEEtransactionsonindustrialelectronics, 2013, 60(8): 3304-3317. [7]ARISOYA,BAYRAKCEKENMK,BASTURKS,etal.Highorderslidingmodecontrolofaspacerobotmanipulator[C]//Proceedingsofthe2011 5thInternationalConferenceonRecentAdvancesinSpaceTechnologies.Istanbul:IEEE, 2011: 833-838. [8]SOLTANPOURMR,OTADOLAJAMP,KHOOBANMH.Robustcontrolstrategyforelectricallydrivenrobotmanipulators:adaptivefuzzyslidingmode[J].IETscience,measurement&technology, 2015, 9(3): 322-334. [9]付濤, 王大鎮, 弓清忠, 等. 改進神經網絡自適應滑模控制的機器人軌跡跟蹤控制[J]. 大連理工大學學報, 2014, 54(5): 523-530.FUTao,WANGDazhen,GONGQingzhong,etal.Robottrajectorytrackingcontrolofimprovedneuralnetworkadaptiveslidingmodecontrol[J].JournalofDalianuniversityoftechnology, 2014, 54(5): 523-530. [10]王艷敏, 馮勇, 陸啟良. 基于遺傳算法的柔性機械手高階終端滑模控制[J]. 吉林大學學報: 工學版, 2009, 39(6): 1563-1567.WANGYanmin,FENGYong,LUQiliang.High-orderterminalslidingmodecontrolofflexiblemanipulatorsbasedongeneticalgorithm[J].JournalofJilinuniversity:engineeringandtechnologyedition, 2009, 39(6): 1563-1567. [11]SHARAFAM,EL-GAMMALAAA.AvariablestructureslidingmodeParticleSwarmOptimization-PSOoptimalregulatingcontrollerforindustrialPMDCmotordrives[C]//Proceedingsof2009IEEEInternationalElectricMachinesandDrivesConference.Miami,FL:IEEE, 2009: 337-343. [12]NIKUSB. 機器人學導論: 分析、系統及應用[M]. 孫富春, 譯. 北京: 電子工業出版社, 2004. [13]王瑞明, 蔣靜坪. 基于適應性遺傳算法的滑模控制感應電機伺服驅動系統研究[J]. 中國電機工程學報, 2005, 25(17): 136-141.WANGRuiming,JIANGJingping.Sliding-modecontrolledinductionmotorservodrivesystemviaAGAoptimization[J].ProceedingsoftheCSEE, 2005, 25(17): 136-141. 王琥,男,1990年生,碩士生,研究方向為機器人視覺、機器人控制以及軌跡規劃。 胡立坤,男,1977年生,研究生導師,主要研究方向是非線性系統動力學與控制、光/風/蓄分布式電源轉換與控制、工業測控網絡應用。已發表核心期刊學術論文50余篇,其中SCI收錄2篇,Ei收錄14篇;獲得軟件著作權1項;獲得實用新型專利1項;申請發明專利8項。 A PSO-based global fast terminal sliding mode controllerfor 6-DOF manipulators WANG Hu, HU Likun, TAN Ying (College of Electrical Engineering, Guangxi University, Nanning 530004, China) In this paper, we propose a global fast terminal sliding mode (GFTSM) control method based on particle swarm optimization (PSO) for the 6-DOF (degrees of freedom) manipulator control system to reduce chattering and improve response times of the system. We divided the multi-input multi-output (MIMO) 6-DOF system into six second-order subsystems, each joint designed and analyzed to overcome the singularity of control law. Further, we demonstrated the stability of our system using Lyapunov theory and optimized the control parameters based on the PSO algorithm. Our simulation results show that the optimized control method not only improves the speed and response times of the system, but also reduces the chattering, thus producing a system with good dynamics and static performance. automatic control technology; 6-DOF manipulator; Lyapunov theory; PSO algorithm; global fast terminal sliding mode; control law; chattering 2016-05-24. 日期:2017-02-17. 廣西自然科學基金項目(2012GXNSFBA053144). 胡立坤. E-mail:hlk3email@163.com. 10.11992/tis.201605024 http://www.cnki.net/kcms/detail/23.1538.tp.20170217.0954.004.html TP24 A 1673-4785(2017)02-0266-06 王琥,胡立坤,譚穎. PSO優化的六自由度機械臂全局快速終端滑模控制[J]. 智能系統學報, 2017, 12(2): 266-271. 英文引用格式:WANG Hu, HU Likun, TAN Ying. A PSO-based global fast terminal sliding mode controller for 6-DOF manipulators[J]. CAAI transactions on intelligent systems, 2017, 12(2): 266-271.
2 PSO優化機械臂滑模控制系統

3 仿真及實驗結果
4 結束語

猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
