基于時延Petri網的故障報警信息糾錯處理方法
2017-05-16 22:46:54張瀛張旗
中國科技縱橫 2017年4期
關鍵詞:故障診斷
張瀛+張旗
摘 要:本文針對電力系統故障診斷問題的特點,基于時延Petri網的電力系統故障診斷模型,提出了電力系統故障報警信息的時序一致性識別算法和不完備信息狀態估計推理方法,并選取典型算例進行了驗證。結果表明,本文所提出的報警信息糾錯處理方法,能夠有效的剔除報警信息中的錯誤信息并補全丟失的信息,提高故障診斷的可靠性。
關鍵詞:故障診斷;Petri網技術;故障報警;信息糾錯
中圖分類號:TP18 文獻標識碼:A 文章編號:1671-2064(2017)04-0122-03
現有的故障診斷系統普遍具有信息不確定性,主要表現在:SCADA/EMS采集的各站(廠)的實時數據規模也越來越大,造成不確定信息產生的可能性越大;當電力系統發生故障時,保護或開關會出現誤動、拒動以及信息傳輸中數據的丟失等錯誤,這些因素會導致信息的不確定性。
針對以上情況,本文應用元件保護配置時延Petri網,對報警信息進行時序一致性識別、和不完備信息狀態估計,濾除錯誤信息,補全丟失的信息,提高故障診斷系統的容錯能力[1]。
1 時間/時延Petri網
1.1 基本 Petri 網的定義
Petri網是用來表征系統狀態以及狀態間轉移關系的一種網圖。一個基本Petri網的結構PNS是一個四元組PNS=
1.2 時間/時延Petri網
以時間為主變量的Petri網模型目前主要有兩種,一種模塊要求每種變遷變化都有一個時間主變量,并要求變量具有延時特性,并要求每一個變遷主變量都存在延時特性,另外這種特性一旦觸發能立即引起延時。另外一種模型對變遷變化的時間主變量限定一定時間范圍,在時間范圍內外,其模塊可以連續運行[3]。
2 開關保護信息的糾錯模型建立及推理
報警信息糾錯處理過程分為以下幾步:
第一,設計形成電力設備緩時Petri網模型;
第二,對出現問題的元件具有一定判別特性;
第三,對發現的預警數據進行模擬計算,自動填補缺失數據。
2.1 繼電保護原理介紹
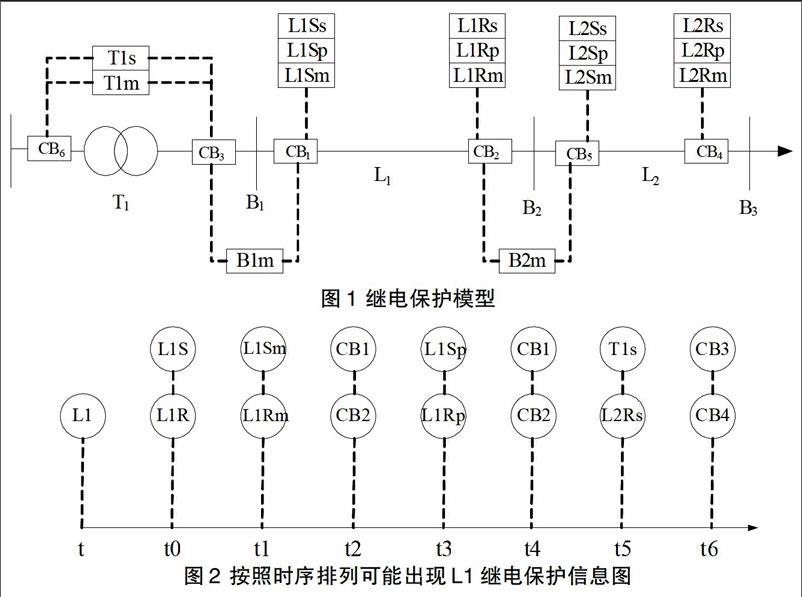
電力系統出現問題后主要需要解決的控制單元有電路網線、變壓裝置和主線;電力線路保護主要有電流保護、距離保護和光纖保護三種實現類型,以下分析僅從三段式來研究。圖1中線路Ll和L2的繼電保護具有3階段模式保護,以L1左端保護L1Sm、L1Sp和L1Ss來分析,其中L1Sm是主保護;L1Sp是第一后備保護;L1Ss是第二后備保護。這種3階段模式保護發生后都會激發CB1。主線保護主要有兩種類型:這種保護主要起到保護主線,通過電流大小變化和電路比定義變化起到保護作用。
圖1繼電保護模型中B1m是主線保護,當電路出現問題,主線保護氣會引發CB1和CB3斷開,起到保護的作用。
變壓器主要有3種類型:電流、電壓及差動法。
如圖1中繼電保護模型為兩種,其中一種覆蓋范圍為變壓器,而另外一種模型的覆蓋范圍為變壓器和變壓器相連的電力元件。
2.2 電力保護Petri網模形成研究
為了簡化研究模型,本文只考慮保護裝置動作時間上的排序關系,不考慮時間間隔要求。具體內容為:
(1)定義時間延緩電力保護Petri網模的庫所集和變遷集。在時間延緩電力保護Petri網模中,定義電力元件、保護系統和開關裝置為庫所集。0和1分別表示元件節點處于“正常”和“故障”狀態。繼電保護節點是由元件狀態影響的保護組成,0和1分別表示繼電保護節點處于“不動作”和“動作”狀態。開關節點是繼電保護控制的開關組成,0和1分別表示開關節點處于有“不動作”和“動作”狀態。
(2)根據繼電保護原理建立元件保護配置時延Petri網模型。以圖1中元件L1為例,建立其繼電保護信息圖,如圖2所示。
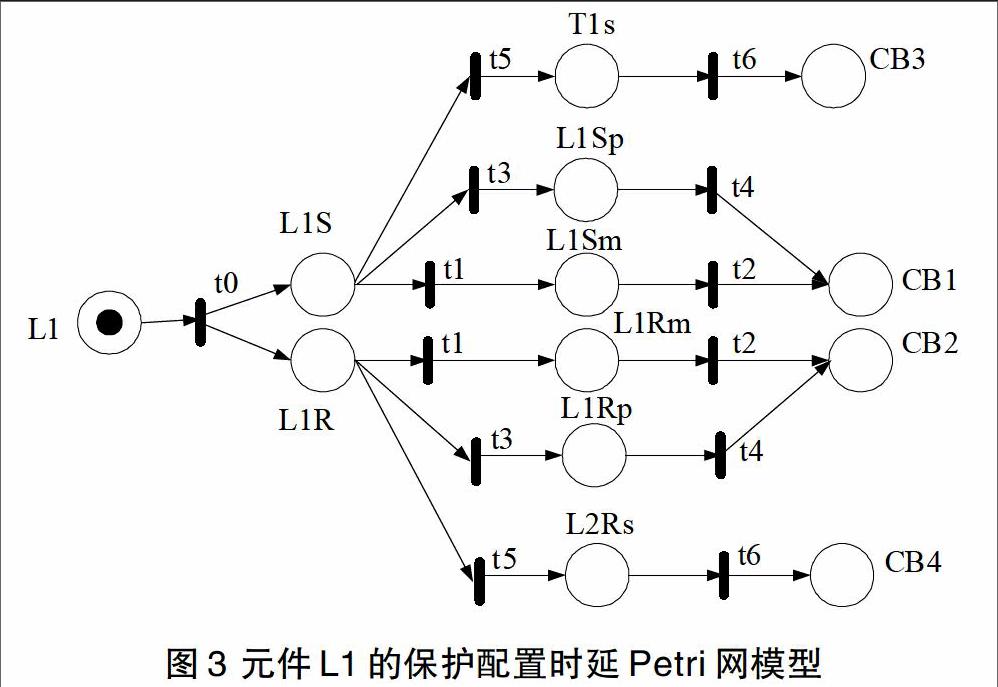
根據圖2建立元件Ll的的保護配置時延Petri網模型,如圖3所示。
2.3 故障信息的相同識別
信息的時序相同識別,就是在故障信息中篩選出符合某一元件故障觸發動作時序保護機制的信息。
在電力系統正常運轉過程中,如果繼電系統沒有發揮作用,這說明涉及的電力保護元件處于關閉;如果繼電系統發揮作用,則會有一定的指示,并通過這樣的指示確定問題故障信息的識別[4]。
在繼電保護裝置C,保護機制發生的定義為Rule(C),Rule(C)通過繼電保護裝置C中延緩時間Petri系統分析獲得。當發現電力系統中繼電保護裝置C出現問題后定義為S=S(0)∪S(1),定義S(0)為繼電保護裝置C處于關狀態,S(1)定義為繼電保護裝置C運行,繼電保護裝置C的問題出現相同識別為S(1)變量為保護機制發生Rule(C)的極大容量SRmax(1),即容量SRmax存在問題因素為最大,其運行為:
(l)以S(1)中每個元素Sj(1)為基時,以保護機制Ru1e (C)掃描識別其它元素,得到相同容量SRj(1)和不同時內容因素SRj(0)。
(2)上一步得到SRj(1),元素最大的即為SRmax(1)。
(3)修正時間不同內容,即Srest(1)=S(1)-SRmax(1),令Srest(0),則動作信息不是繼電保護裝置C啟動的。
(4)獲得繼電保護裝置C,形成判別目錄SF,SF=S(0)∪Srest(0)∪SRmax(l)。
其中信息相同定義算法:
假設繼電保護裝置C的保護機制發生為Ru1e(C)=(a1,b2,c3,),下標1,2,3表示為保護機制a,b,c的變化量。實際問題內容為s={a(1)1,b(1)2,c(1)1,};其中1表示起作用,0代表沒有工作。
由于繼電保護(e0)沒有動作,則有:S=S(0)∪S(1)={e(0)0}∪{a(1)1,b(1)2,c(1)1,}。
(1)先以S(1)中a(1)1為基時,按照保護機制Rule(C)獲得的該元素定義時間相同內容集Sa(1)={a(1)};
(2)比較元素個數得到時序一致的極大值集SRmax(1)={a(1)1,b(1)2}。
(3)根據SRmax(1),評估C(1)1不是繼電保護裝置C觸發的,改問關模式,得到Srest(0)={c(0)0}。
(4)最后得出用于繼電保護裝置C故障診斷的信息集為:SF=S(0)∪Srest(0)∪SRmax(1)={a(1)1,b(l)2,c(0)0}
2.4 基于時延Petri網的報警信息狀態估計
經過上一節的處理,已篩選出符合嫌疑故障元件動作時序的報警信息,但這些信息可能不完備,本節目的為補全缺失的信息。
缺失信息節點狀態可能與元件節點的狀態相關,而元件節點的狀態是未知的,此時需對元件節點的狀態進行假設,再根據該假設和已有保護信息來判斷缺失信息節點狀態。開關庫所,有動作信息的定義為“1”,無動作信息的定義為“0”。
3 算例
以圖1線路L1故障為例,推理過程如下。
3.1 一致性識別
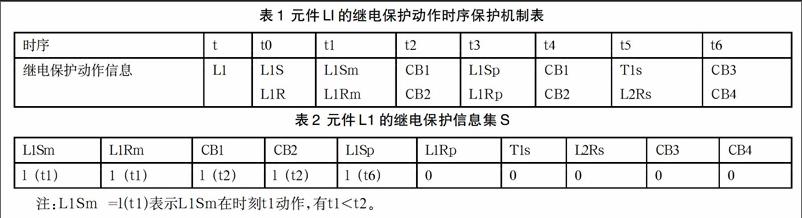
元件L1故障下繼電保護動作的時序保護機制表Ruel(L1)可通過圖2得到,如表1表2所示。
對于元件L1的繼電保護信息集S,依據時序保護機制Ruel(L1),獲得時序一致最大化信息集為:SRmax(1)=(L1Sm,L1Rm,CB1,CB2},修正L1Sp為閉合狀態L1Sp=0,得到故障診斷信息集SF。
3.2 報警信息狀態估計
假設在L1元件一致性識別后保護節點故障信息如表3所示。
將保護信息代入到元件L1的保護配置時延Petri網模型中,結果如圖4所示。
然后對繼電保護單元進行模擬,按照時序為L1Sm、L1Rm、L1Sp、 L1Rp、T1s、L2Rs。過程為:
(1)L1Sm的目標單位CB1定義為“0”,L1Sm的定義不變,為“0”。
(2)L1Rm的目標單位CB2定義為“1”,L1Rm的定義為“1”,其指令單位L1R通過L1Rm到達CB2,L1Rm的定義不變,為“1”。
(3)L1Sp的目標單位CB1定義為“0”,L1Sp的定義不變,為“0”。
(4)L1Rp的目標單位CB2定義為“1”,其指令單位L1R通過L1Rm到達CB2,L1Rp的定義不變,為“0”。
(5)T1s的目標單位CB3定義為“1”,T1s的定義為“0”,其指令單位L1R不能通過定義為“1”的節點到達CB3,因此將T1s的定義變為“1”。
(6)L2Rs的目標單位CB4定義為“0”,L2Rs的定義不變,為“0”。
最后統計出報警內容修正集{T1s},形成的預警信息集{L1Rm,CB2},供排除故障使用。
4 結語
本文針對電力系統故障診斷問題的特點,基于時延Petri網的電力系統故障診斷模型,提出了電力系統故障報警信息的時序一致性識別算法和不完備信息狀態估計推理方法,并選取典型算例進行了驗證。結果表明,本文所提出的報警信息糾錯處理方法,能夠有效的剔除報警信息中的錯誤信息并補全丟失的信息,提高故障診斷的可靠性。
參考文獻
[1]吳欣.基于改進貝葉斯網絡方法的電力系統故障診斷研究[D].浙江大學碩士論文,2005.
[2]蔣昌俊.Petri網的行為理論及其應用[M].北京:高等教育出版社,2003.
[3]袁崇義.Petri網原理與應用[M].北京:電子工業出版社,1998.
[4]王建元,紀延超.Petri網絡在變壓器故障診斷中的應用[J].電網技術,2002,26(8):21~24.
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00
