基于迭代學習與FIR濾波器的PMLSM高精密控制
2017-05-16 01:08:11趙希梅馬志軍朱國昕
電工技術學報 2017年9期
趙希梅 馬志軍 朱國昕
(1. 沈陽工業大學電氣工程學院 沈陽 110870 2. 沈陽軍區總醫院醫學工程科 沈陽 110016)
?
基于迭代學習與FIR濾波器的PMLSM高精密控制
趙希梅1馬志軍1朱國昕2
(1. 沈陽工業大學電氣工程學院 沈陽 110870 2. 沈陽軍區總醫院醫學工程科 沈陽 110016)
針對永磁直線同步電機(PMLSM)運行時易受端部效應、摩擦力、負載擾動、參數變化等不確定性因素的影響而難以達到高精度跟蹤控制的問題,提出一種基于迭代學習與有限沖擊響應(FIR)濾波器的控制方案。PMLSM伺服系統執行重復任務時,迭代學習控制(ILC)可有效地抑制重復性擾動,具有很高的控制精度,但執行非重復性任務時很難獲得較高的控制精度。為了進一步改善基于ILC的PMLSM伺服系統運行迭代1次的跟蹤精度,利用ILC的輸出信息來設計FIR濾波器,進而用FIR濾波器來代替ILC,使控制系統達到最優的ILC,以提高系統的跟蹤精度。采用滑模控制(SMC)對FIR濾波器進行補充,使位置誤差快速收斂到一定的界限內,以提高系統的抗擾能力。實驗結果表明,所提出的控制方案使系統具有很高的位置跟蹤精度和很強的魯棒性。
永磁直線同步電機 迭代學習控制 FIR濾波器 滑模控制 跟蹤精度
0 引言
與傳統“旋轉電機+滾珠絲杠”的驅動方式相比,永磁直線同步電機(Permanent Magnet Linear Synchronous Motor,PMLSM)采用了直接驅動方式,負載與電機之間不需要任何轉換環節,具有高速度、高精度和低維護等優點,被廣泛用于高速精密數控、精密儀器等領域[1-3]。但正是由于直線電機缺少中間緩沖,使其對端部效應、摩擦力、負載擾動和參數攝動等極其敏感,從而增加了控制的難度[4-6]。因此,為了提高系統控制性能,必須要設計一個具有高跟蹤精度和強魯棒性的控制器。
近年來,許多學者對PMLSM的高精密控制做了深入研究。文獻[7]針對PMLSM提出一種最優參數負載擾動補償方法,有效地抑制了負載擾動,但由于控制器設計簡單,跟蹤精度較低。文獻[8]提出一種基于擾動觀測器和重復控制的PMLSM魯棒控制,有效地抑制了擾動,明顯增強了系統的魯棒性,但跟蹤精度有待提高。文獻[9]提出一種應用在高精度PMLSM位置平臺的離散自適應滑模控制(Sliding Mode Control,SMC),將迭代學習控制(Iterative Learning Control,ILC)與SMC相結合,跟蹤精度高,魯棒性強,但電機易出現抖振現象。文獻[10]提出二維分段復合迭代學習控制,在迭代軸和時間軸上很好地抑制了PMLSM的推力波動,大大提高了定位精度,但需要迭代20次,只適用于執行重復任務的系統。
為了提高PMLSM伺服系統的跟蹤性能,發揮ILC高精度跟蹤的優勢,本文采用將ILC應用到執行非重復任務中的思想,提出了一種基于迭代學習與FIR濾波器的控制方案。PMLSM伺服系統執行重復任務時,ILC能夠有效地抑制重復性擾動。PMLSM伺服系統執行非重復任務時,將ILC的輸出信息用于有限沖擊響應(Finite Impulse Response,FIR)濾波器的設計中,用FIR濾波器代替ILC,并用SMC對其補充,使系統獲得最優迭代的控制效果和快速收斂性。實驗結果表明該控制方法與比例微分(Proportional Derivative, PD)反饋控制相比,可以有效地提高系統的跟蹤性能和魯棒性能。
1 PMLSM數學模型
PMLSM的運動方程為
(1)

摩擦力的表達式為
(2)
端部效應和齒槽力可分別表示為
(3)
(4)
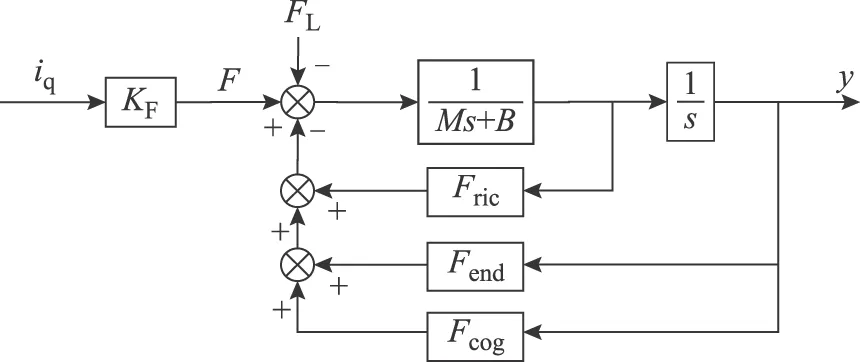
圖1 PMLSM的數學模型Fig.1 Mathematical model of PMLSM
2 PMLSM的ILC系統設計
PMLSM的ILC系統框圖如圖2所示。圖2中,P(s)為廣義被控對象,PI為速度控制器,Ff為摩擦力、端部效應、齒槽力和負載阻力等擾動,L(s)為學習濾波器,Q(s)為低通濾波器,yd為系統期望位置信號,yk+1為第k+1次迭代的系統輸出位置信號,ek+1為第k+1 次迭代的位置誤差信號,vk既是第k次迭代的ILC輸出信號也是第k+1次迭代的ILC輸入信號,vk+1為第k+1次迭代的ILC輸出信號,uk+1為第k+1次迭代的控制信號,C(s)為系數分別為KP和KD的PD反饋控制器。由圖2可以看出
uk+1=Cek+1+vk+1
(5)
vk+1=Q(vk+Lek)
(6)
系統的輸出位置為
yk+1=uk+1P
(7)
則
(8)
因此,ILC收斂的充分條件為[11,12]
(9)
式中,P1=PS,其中S=1/(1+CP),S為靈敏度函數。由式(9)可知,L和Q決定了系統的收斂性。為了保留系統有效地控制輸入信號,并抑制高頻隨機擾動信號,設計Q的截止頻率ω大于期望軌跡的固有頻率,小于隨機擾動信號的頻率。Q的形式為
(10)
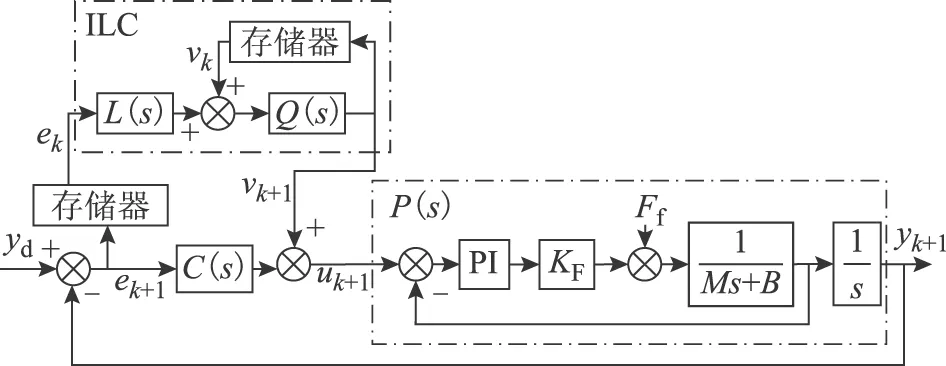
圖2 PMLSM的ILC系統框圖Fig.2 Block diagram of ILC system for PMLSM
PD型ILC適用于位置伺服系統,具有很好的控制性能。為了簡化L的設計,選擇L為
L(s)=K1+K2s
(11)
式中,K1為比例系數;K2為微分系數。當調節K1和K2使L滿足式(9)時,系統收斂。
ILC具有控制精度高、學習收斂快、不需要被控對象精確數學模型等優點,系統執行重復任務時,理論上可以完全地抑制重復性擾動并獲得高精度跟蹤控制。但當系統存在大量非重復性擾動時,隨著迭代次數的增加會無限地放大擾動,容易導致系統的控制精度下降[13-15]。并且系統迭代1次后的跟蹤誤差較大,往往需要迭代多次,系統才能達到很好的跟蹤效果,因而ILC只適用于執行重復任務的系統。
由于ILC能夠抑制重復性擾動而不能抑制非重復性擾動,P(s)可以表示為
P(s)=G(s)+d
(12)
式中,G(s)為已知的傳遞函數;d為參數變化、摩擦力和負載阻力等引起的非重復性擾動。
3 基于FIR濾波器和SMC的PMLSM系統設計
ILC使PMLSM系統具有很好的控制性能,但只適用于執行重復任務。對于執行非重復任務的系統,為進一步提高系統的跟蹤性能并使其接近ILC的控制精度,可以將ILC的輸出信息應用于FIR濾波器的設計中。為進一步改善系統的魯棒性,設計了滑模控制器。基于FIR濾波器和SMC的PMLSM系統框圖如圖3 所示。圖2中的ILC被替換為FIR和SMC,yk+1被y替換,表示運行1次的輸出位置信號。
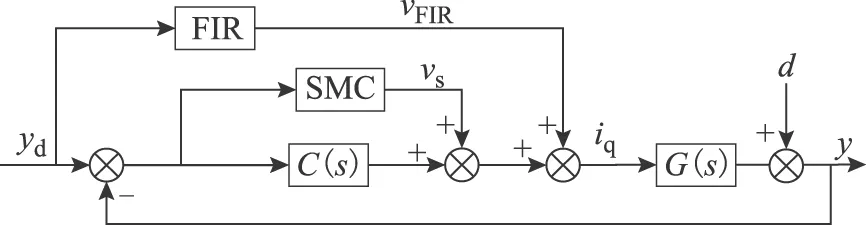
圖3 基于FIR濾波器和SMC的PMLSM系統框圖Fig.3 Block diagram of PMLSM system based on FIR filter and SMC
3.1 FIR濾波器的設計
由于FIR濾波器算法接近ILC,采用FIR濾波器替代ILC作為前饋控制器。FIR的參數為
(13)
式中,n為FIR濾波器的長度,n=n1+n2;n2為FIR濾波器的預測長度。W={wi,i∈n}表示FIR濾波器的系數,由最優迭代時ILC的輸出信號vo和期望位置信號yd設計,即
(14)
FIR濾波器的矩陣形式可表示為
(15)
式中,(1,m)為離散點的范圍,m=(Tf+T)/T;T為采樣周期;Tf為運行時間。在實際設計時要注意:①當t<1時,yd(t)=0,當t>m時,yd(t)=s;②只需尋找ILC的最優迭代次數,可以忽略在迭代軸上由于擾動的放大導致誤差先減小后增大的問題。
從式(15)可以看出,當n1=1、n2=0時,VFIR=Vo,那么最優迭代的ILC實際上為一種特殊的FIR濾波器。假設電機運行時給定一個常量的位置信號,由于存在摩擦力,那么電磁推力不為零,則∑wi≠0,因而可以將摩擦力看作固定存在的外部擾動力,必須消除。因此,將FIR濾波器的系數修改為
(16)

3.2SMC的設計
基于FIR濾波器的PMLSM系統有很高的控制精度,但由于ILC只抑制重復性擾動,在實際應用中魯棒性較差。為了減小負載擾動和參數變化等對伺服系統產生的影響,采用SMC作為FIR濾波器的補充,以提高系統的抗擾能力。為了設計SMC,定義廣義誤差為
(17)
式中,e為位置跟蹤誤差;λ為一正常數。那么SMC的表達式為
(18)
式中,fmax為一正常數;δ為邊界層厚度;sat(·)為飽和函數。飽和函數可表示為
(19)
SMC對FIR的補充可同時發揮ILC和SMC的優勢,不僅可以抑制重復性擾動,還可以抑制非重復性擾動,使系統獲得很好的跟蹤性能和魯棒性能。
3.3 收斂性分析
從圖3中可以看出,輸出信號y可表示為
y(t)=G(s)[vFIR+vs+C(s)e(t)]+d(t)
(20)
PMLSM執行重復任務時,ILC能夠達到很高的控制精度,而FIR的系數由ILC獲得,因此vFIR為主要控制信號,并且可以得到
yd(t)-ε(t)=G(s)vFIR
(21)
式中,ε(t)為一很小的誤差信號。將式(21)代入式(20) 可得
(C(s)G(s)+1)e(t)+G(s)vs=ε(t)-d(t)
(22)
將式(18)代入式(22)可得
(23)
當S>δ時,式(23)可表示為
(C(s)G(s)+1)e(t)=ε(t)-d(t)-G(s)fmax
(24)
當S<-δ時,式(23)可表示為
(C(s)G(s)+1)e(t)=ε(t)-d(t)+G(s)fmax
(25)
當-δ≤S≤δ時,將式(17)代入式(23),式(23) 可表示為
(26)
由以上分析可知,S將收斂到[-δ,δ]的范圍之內。如果d=0,誤差將收斂到一個常數,結合前兩種情況,誤差收斂到[-δ/λ,δ/λ]的范圍之內。在實際應用中,d不可能為0,在式(26)中的PD控制器作用下誤差收斂到一個有界層。
4 系統實驗與分析
為了驗證所設計控制方案的可行性,設計了如圖4所示的基于DSP的PMLSM控制系統框圖,主要由PMLSM、PC+DSP運算控制單元、IPM主回路功率變換單元、動子電流檢測單元和直線光柵尺位置檢測單元等組成。核心控制單元采用TMS320LF2407A DSP。基于DSP的PMLSM控制系統實驗裝置如圖5所示。
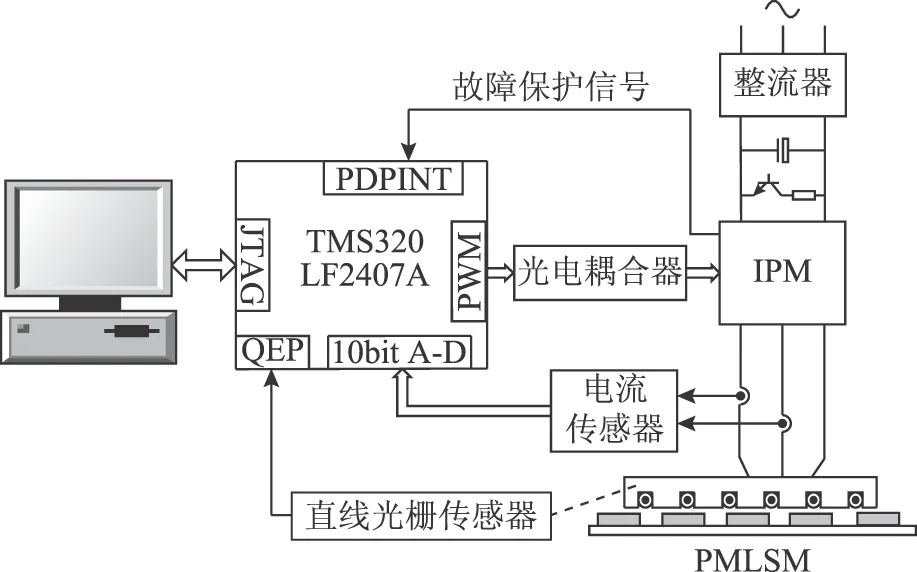
圖4 基于DSP的PMLSM控制系統框圖Fig.4 Block diagram of the PMLSM control system based on DSP
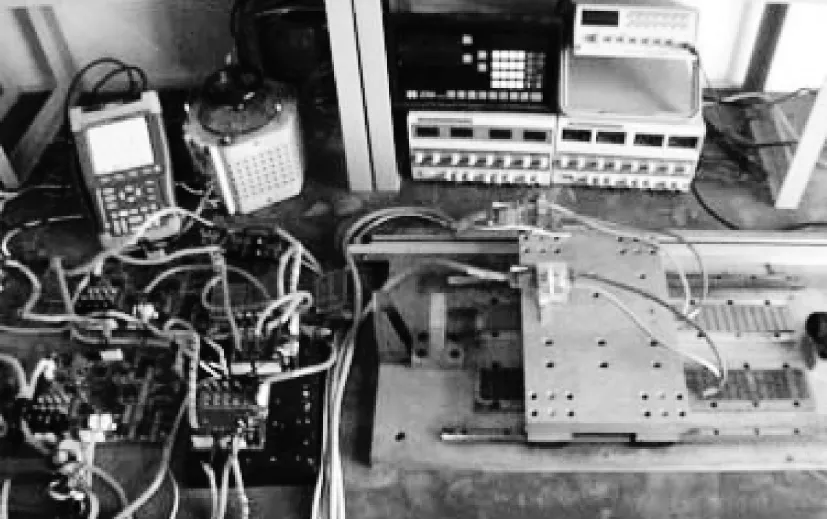
圖5 基于DSP的PMLSM控制系統實驗裝置Fig.5 PMLSM control system experiment set based on DSP
PMLSM的參數選擇為R=1 Ω,M=0.66 kg,τ=60.96 mm,L=8.5 mH,B=0.2 N·s/m,Ψf=0.16 Wb。為了測試系統的控制精度,給定的位置期望軌跡為yd=0.001sin(2t/3),t∈[0,3]。首先采用ILC對位置進行跟蹤,在滿足系統收斂的條件下,L(s)的參數選擇為K1=8 500,K2=1.2,C(s)的參數選擇為KP=12 000,KD=80,低通濾波器Q設計為
系統第1次運行時,ILC沒有學習,控制器實際上為PD反饋控制器,基于PD反饋控制的位置誤差曲線如圖6所示。可以看到,誤差較大,最大誤差約為15 μm。圖7為第5次迭代的位置誤差曲線,由圖可見5次迭代后的最大位置誤差約為6.5 μm,與第1次迭代的PD反饋控制相比,顯著地減小了位置誤差。
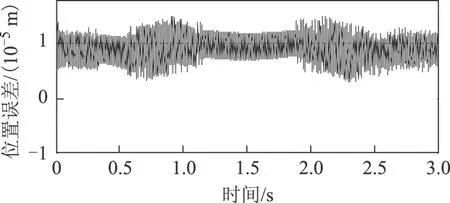
圖6 基于PD反饋控制的位置誤差曲線Fig.6 Position error curve based on PD feedback control
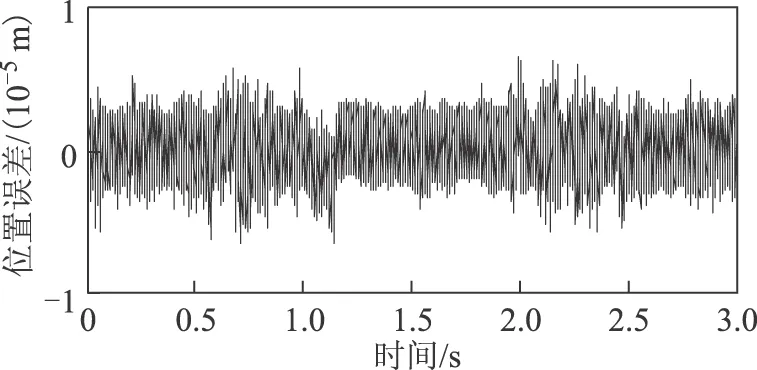
圖7 第5次迭代的位置跟蹤誤差曲線Fig.7 Position tracking error curve in the 5th iteration
執行非重復任務時,采用FIR濾波器和SMC替代ILC作為前饋控制器。FIR濾波器的長度選擇為4,預測長度選擇為2,由于迭代5次后系統已經有很高的控制精度,所以選擇5作為最優迭代次數,并調用ILC迭代5次后所保存的信號vo以確定FIR濾波器的系數,經多次調試后選擇SMC的參數為λ=1 000,fmax=0.1,δ=0.15。對正弦位置給定信號進行跟蹤控制,采用基于FIR濾波器和SMC的位置跟蹤誤差曲線如圖8所示,可見最大誤差為6μm,與PD反饋控制相比,減小了3/5。與運行5次的ILC相比,運行1次的最大誤差減小了0.5μm。
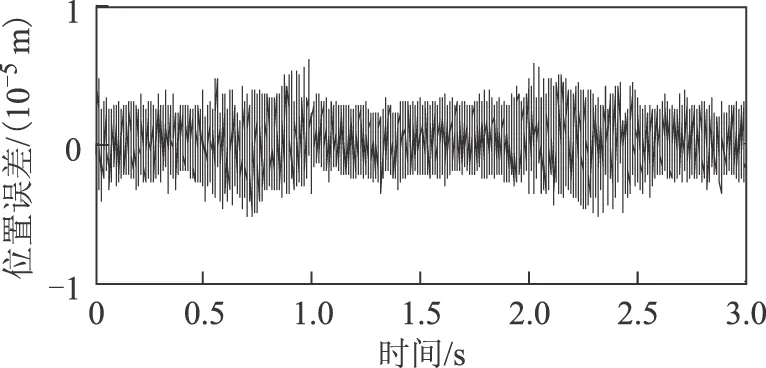
圖8 基于FIR濾波器和SMC的位置跟蹤誤差曲線Fig.8 Position tracking error curve based on FIR filter and SMC
為了測試所設計系統運行1次的響應速度和抗擾性能,對1mm的階躍位置信號進行跟蹤,在t=1 s處突加20 N的負載力,位置跟蹤曲線如圖9所示。從圖9a可以看出,與PD反饋控制相比,基于FIR和SMC的PMLSM系統響應速度更快,跟蹤精度更高。從圖9b可以看出,基于FIR和SMC的PMLSM系統,在1 s處的誤差變大,最大誤差約為17.5 μm,在可接受范圍之內,經過2~4 ms,誤差恢復到6 μm范圍之內,而基于PD反饋控制的PMLSM系統,在1 s附近的最大誤差約為26 μm,經比較可知,基于FIR和SMC的PMLSM系統具有更強的魯棒性。
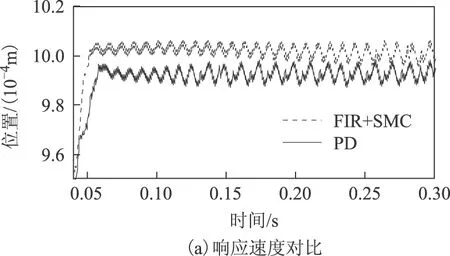
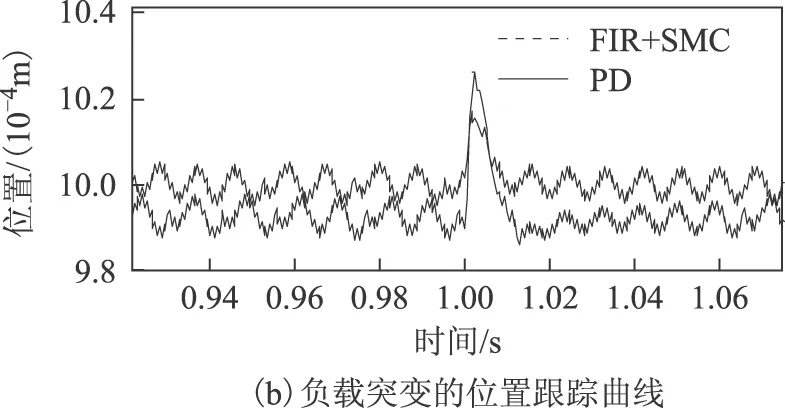
圖9 對階躍位置信號的跟蹤曲線Fig.9 Tracking curves for step position signal
5 結論
為了提高PMLSM伺服系統的控制精度,本文提出了基于迭代學習與FIR濾波器相結合的控制策略。在執行非重復任務的伺服系統中,利用最優迭代時的ILC設計FIR濾波器,并采用FIR濾波器和SMC代替ILC作為前饋控制器。實驗研究表明,本文所提控制策略與PD反饋控制和ILC相比,可極大地改善控制精度,具有更快的響應速度和更強的抗擾能力,在今后的研究中可繼續改進ILC算法,進一步提高控制精度。
[1] 郭慶鼎, 孫宜標, 王麗梅. 現代永磁電動機交流伺服系統[M]. 北京: 中國電力出版社, 2006.
[2] 夏加寬, 李文瑞, 何新, 等. 各向異性橫向磁通永磁直線電機穿片漏磁分析[J]. 電工技術學報, 2015, 30(14): 518-524. Xia Jiakuan, Li Wenrui, He Xin, et al. Analysis of anisotropic permeate leakage flux on transverse flux permanent magnet linear machine[J]. Transactions of China Electrotechnical Society, 2015, 30(14): 518-524.
[3] 韓雪巖, 祁坤, 張哲, 等. 永磁同步直線電機磁阻力分析及抑制措施[J]. 電工技術學報, 2015, 30(6): 70-76. Han Xueyan, Qi Kun, Zhang Zhe, et al. Analysis and suppression measures of magnetic resistance force in permanent magnet linear synchronous motors[J]. Transactions of China Electrotechnical Society, 2015, 30(6): 70-76.
[4] 寇寶泉, 張赫, 郭守侖, 等. 輔助極一體式永磁同步直線電機端部定位力抑制技術[J]. 電工技術學報, 2015, 30(6): 106-113. Kou Baoquan, Zhang He, Guo Shoulun, et al. End effect detent force reduction for permanent magnet linear synchronous motors with auxiliary poles one-piece structure[J]. Transactions of China Electrotechnical Society, 2015, 30(6): 106-113.
[5] Zhu Y W, Lee S G, Chung K S, et al. Investigation of auxiliary poles design criteria on reduction of end effect of detent force for PMLSM[J]. IEEE Transactions on Magnetics, 2009, 45(6): 2863-2866.
[6] Tan K K, Dou H, Chen Y, et al. High precision linear motor control via relay-tuning and iterative learning based on zero-phase filtering[J]. IEEE Transactions on Control Systems Technology, 2001, 9(2): 244-253.
[7] 王麗梅, 武志濤, 劉春芳. 永磁直線伺服系統最優參數負載擾動補償方法[J]. 電工技術學報, 2012, 27(3): 133-138. Wang Limei, Wu Zhitao, Liu Chunfang. Optimal parameter load disturbance compensation method of permanent magnet linear servo system[J]. Transactions of China Electrotechnical Society, 2012, 27(3): 133-138.
[8] 趙希梅, 郭慶鼎. 基于擾動觀測器和重復控制器的永磁直線同步電動機魯棒控制[J]. 中國電機工程學報, 2010, 30(15): 64-69. Zhao Ximei, Guo Qingding. Robust control based on the disturbance observer and repetitive controller for permanent magnet linear synchronous motor[J]. Proceedings of the CSEE, 2010, 30(15): 64-69.
[9] Chen M Y, Lu J S. High-precision motion control for a linear permanent magnet iron core synchronous motor drive in position platform[J]. IEEE Transactions on Industrial Informatics, 2014, 10(1): 99-108.
[10]楊俊友, 馬航, 關麗榮, 等. 永磁直線電機二維分段復合迭代學習控制[J]. 中國電機工程學報, 2010, 30(30): 74-80. Yang Junyou, Ma Hang, Guan Lirong, et al. Two-dimensional segmented synthesis iterative learning control of permanent magnet linear motor[J]. Proceedings of the CSEE, 2010, 30(30): 74-80.
[11]Huang Deqing, Xu Jianxin, Venkataramanan V, et al. High-performance tracking of piezoelectric positioning stage using current-cycle iterative learning control with gain scheduling[J]. IEEE Transactions on Industrial Electronics, 2014, 61(2): 1085-1098.
[12]Rotariu I, Steinbuch M, Ellenbroek R. Adaptive iterative learning control for high precision motion systems[J]. IEEE Transactions on Control System Technology, 2008, 16(5): 1075-1082.
[13]Tsai M S, Lin M T, Yau H T. Development of command-based iterative learning control algorithm with consideration of friction, disturbance,and noise effects[J]. IEEE Transactions on Control Systems Technology,2006,14(3):511-518.
[14]Freeman C, Tan Y. Iterative learning control with mixed constraints for point-to-point tracking[J]. IEEE Transactions on Control Systems Technology, 2013, 21(3): 604-616.
[15]趙希梅, 馬志軍, 朱國昕. 基于Smith預估和性能加權函數的永磁直線同步電機魯棒迭代學習控制[J]. 電工技術學報, 2016, 31(19): 141-146. Zhao Ximei, Ma Zhijun, Zhu Guoxin. Robust iterative learning control for PMLSM based on Smith predictor and performance weighting function[J]. Transactions of China Electrotechnical Society, 2016, 31(19): 141-146.
(編輯 于玲玲)
High Precision Control for PMLSM Based on Iterative Learning and FIR Filter
ZhaoXimei1MaZhijun1ZhuGuoxin2
(1. School of Electrical Engineering Shenyang University of Technology Shenyang 110870 China 2. Medical Engineering Department General Hospital of Shenyang Military Region Shenyang 110016 China)
For permanent magnet linear synchronous motor(PMLSM), the influence of the uncertain factors such as the end effect, friction,load force and parameter variation and so on were easily affected by the operation.It was very difficult to achieve high precision tracking control.A control scheme based on iterative learning and finite impulse response(FIR) filter was proposed.Iterative learning control(ILC) could effectively suppress the repetitive disturbances and had higher control precision for PMLSM servo system with repetitive tasks.When PMLSM implemented non-repetitive tasks, it was difficult to achieve higher control precision.In order to further improve the tracking accuracy of the system running 1 times for PMLSM servo system based on ILC, FIR filter was designed by using the output information of ILC.The well designed filter was used to replace ILC.It made the control system gain the optimal ILC.The tracking accuracy of the system was improved.The sliding mode control(SMC) was used to supplement the FIR filter, so that the position error was fast converged to a certain limit, so as to improve the ability of disturbance rejection of the system. The experimental results indicate that the proposed control scheme makes the system have higher position tracking accuracy and stronger robustness.
Permanent magnet linear synchronous motor, iterative learning control, finite impulse response filter, sliding mode control, tracking accuracy
國家自然科學基金項目(51175349)和遼寧省教育廳科學技術研究項目(L2013060)資助。
2016-01-27 改稿日期2016-06-24
TM315
趙希梅 女,1979年生,博士,副教授,研究方向為伺服電機控制、魯棒控制、智能控制等。
E-mail:zhaoxm_sut@163.com(通信作者)
馬志軍 男,1988年生,碩士研究生,研究方向為直線伺服、智能控制。
E-mail:mazhijunma@126.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25