一種高起動轉(zhuǎn)矩的感應電機起動方法
2017-05-16 01:08:11孟彥京段明亮馬匯海高澤宇
電工技術(shù)學報 2017年9期
陳 君 孟彥京 段明亮 馬匯海 高澤宇
(陜西科技大學電氣與信息工程學院 西安 710021)
?
一種高起動轉(zhuǎn)矩的感應電機起動方法
陳 君 孟彥京 段明亮 馬匯海 高澤宇
(陜西科技大學電氣與信息工程學院 西安 710021)
基于六邊形空間電壓矢量基本原理,提出一種高起動轉(zhuǎn)矩的感應電機起動控制方法。首先分析在工頻正弦電網(wǎng)上利用六邊形空間電壓矢量實現(xiàn)離散變頻的原理,并從轉(zhuǎn)子旋轉(zhuǎn)磁鏈軌跡證明其可行性。然后利用大功率感應電機特性說明空間電壓矢量變頻下電流斷續(xù)時間內(nèi)磁鏈幾乎不衰減,再通過電壓矢量的平移實現(xiàn)基于六邊形兩相導通空間電壓矢量的多級離散變頻。采用適當?shù)念l率切換方式,使頻率切換過程電機的沖擊最小,近似達到離散變頻無擾切換的目的。最后,通過仿真和實測結(jié)果對比,驗證了所提出的起動方法的有效性。該方法降低了起動電流、提高了起動轉(zhuǎn)矩,具有一定的理論研究和實際應用價值。
離散變頻 轉(zhuǎn)子磁鏈 高起動轉(zhuǎn)矩 空間電壓矢量 感應電機
0 引言
三相感應電機已在現(xiàn)代工業(yè)生產(chǎn)中得到了廣泛應用,常被用于驅(qū)動水泵、風機和研磨機等,功率從幾千瓦到幾萬千瓦不等。感應電機作為動力來源,在有些場合經(jīng)常需要起動和停車,而感應電機直接起動會產(chǎn)生很大的沖擊電流,且產(chǎn)生大量的焦耳熱甚至燒毀電機,同時引起網(wǎng)壓驟降,嚴重影響同網(wǎng)用電設(shè)備的正常工作。所以工業(yè)中大功率感應電機均配有起動裝置,在電機起動時減緩起動速度,降低起動沖擊電流,在電機停車時緩慢降低轉(zhuǎn)速,避免突然斷電導致生產(chǎn)線驟停而危及產(chǎn)品安全。一般地,電機起動裝置分為機械式切換起動(如星三角變換、磁阻和液態(tài)水阻起動等)、電子式晶閘管起動和變頻器起動等。機械式起動存在二次沖擊和效率低等問題,難以在實際中使用,而變頻器軟起動方式雖能降低起動沖擊電流,并增大初始起動電磁轉(zhuǎn)矩,但起動完成后不能直接旁路切換到工頻電網(wǎng),而且存在成本較高、容易損壞等缺點。電子式晶閘管起動主要指基于三相反并聯(lián)晶閘管的工頻調(diào)壓起動方式[1-5],該起動方式結(jié)構(gòu)簡單、價格低廉,最重要的是起動完成后能無擾切換到工頻電網(wǎng),但起動轉(zhuǎn)矩較低。因此,為了提高電子式晶閘管軟起動器的起動轉(zhuǎn)矩,有必要研究一種高起動轉(zhuǎn)矩的感應電機變頻軟起動方法。
隨著大功率感應電機的廣泛應用,有關(guān)電機起動問題的研究[1-8]越來越多,已有許多文獻做了大量的工作。文獻[1-4]在晶閘管調(diào)壓控制中利用一個動態(tài)函數(shù)來描述觸發(fā)角的變化,通過減緩主磁通的建立過程而達到電機平滑加速和優(yōu)化起動的目的。文獻[5]提出一種基于轉(zhuǎn)矩控制的電機起動方法,該方法將三相定子電壓、電流經(jīng)過坐標變換實現(xiàn)解耦之后,再通過定子磁鏈計算出電磁轉(zhuǎn)矩,經(jīng)PI閉環(huán)控制實現(xiàn)轉(zhuǎn)矩平衡、電機平穩(wěn)加速的目的。文獻[6-8]利用晶閘管的開關(guān)作用,有選擇地連續(xù)導通若干正半波和等數(shù)量的負半波而從整體上獲得近似正弦變化的周波離散變頻,通過控制導通正、負半波的數(shù)量從而實現(xiàn)變頻。文獻[9]首先從電機三相導通、兩相導通和三相不導通的定子狀態(tài)分析產(chǎn)生轉(zhuǎn)矩脈動的原因,然后結(jié)合限流控制研究了減小轉(zhuǎn)矩脈動的起動方法。文獻[10,11] 通過電機轉(zhuǎn)矩公式和仿真分析調(diào)壓調(diào)速過程中電磁轉(zhuǎn)矩和轉(zhuǎn)速振蕩的原因,提出了功率因數(shù)角補償?shù)拈]環(huán)控制策略。然而,以上文獻要么提出了基于周波控制的離散變頻,轉(zhuǎn)矩脈動和諧波較大,對提升電機起動轉(zhuǎn)矩有限;要么就是調(diào)壓或限流起動方式,其根本仍是降壓起動,難以從根本上提高電機起動轉(zhuǎn)矩[12]。此外利用空間電壓矢量研究電機轉(zhuǎn)矩與控制特性的方法大多集中在交直交變頻系統(tǒng)[13,14],基于工頻正弦電網(wǎng)的變頻起動方法研究較少。
本文在工頻正弦電網(wǎng)上利用六邊形空間電壓矢量原理,提出一種基于磁鏈軌跡控制的高起動轉(zhuǎn)矩感應電機新型離散變頻起動方法[15-17]。首先分析了基于空間電壓矢量三相反并聯(lián)晶閘管電路7分頻的工作原理,并通過對轉(zhuǎn)子旋轉(zhuǎn)磁鏈運行軌跡和衰減規(guī)律的分析證明其可行性;然后在7分頻的基礎(chǔ)上,按照磁場對稱的原則,選擇適當?shù)目臻g電壓矢量實現(xiàn)多級離散變頻,同時采用特定的頻率切換方法使頻率切換過程平穩(wěn);最后通過仿真和實驗測試,驗證了所提變頻起動方法的有效性。該方法具有一定的理論意義和應用價值。
1 空間電壓矢量的離散變頻原理
1.1 基于六邊形空間電壓矢量的離散變頻原理
根據(jù)三相電壓的正、負序分量法[8,18-20],只有A、B、C三相互差120°才能形成穩(wěn)定的正序電壓。如以θA為參考相位,則θB為
(1)
式中,k為整數(shù),所以有υ=3k/2+1,即分頻系數(shù)υ=1、4、7…時由六邊形空間電壓矢量獲得的離散變頻得到的是正序電壓。同理,當υ=2、5、8,…時分頻所得到的離散頻率是負序電壓,當υ=3、6、9,…時分頻所得到的離散頻率是不對稱的電壓。
本文提出一種基于三相晶閘管的六邊形空間電壓矢量離散變頻,其原理是在三相電網(wǎng)基礎(chǔ)上每次只觸發(fā)導通其中兩相正弦電壓,以獲得一個兩相導通的電壓矢量,按空間六邊形電壓矢量旋轉(zhuǎn)方向,間隔420°電角度后,觸發(fā)導通下一個電壓矢量,依此循環(huán)即可在7個工頻周期內(nèi)獲得組成六邊形的6個電壓空間矢量,即得到基于六邊形空間電壓矢量的離散變頻7分頻,如圖1所示。
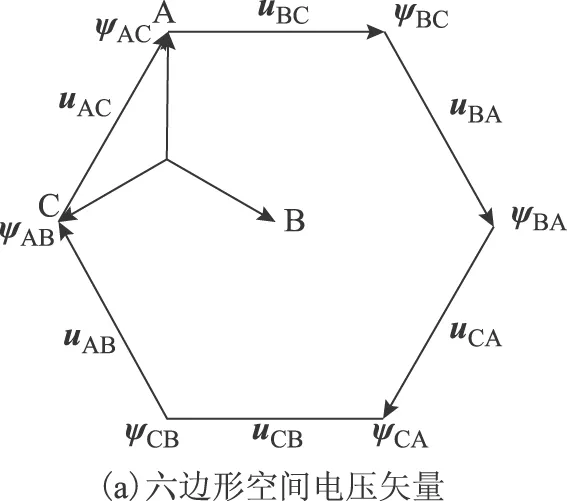
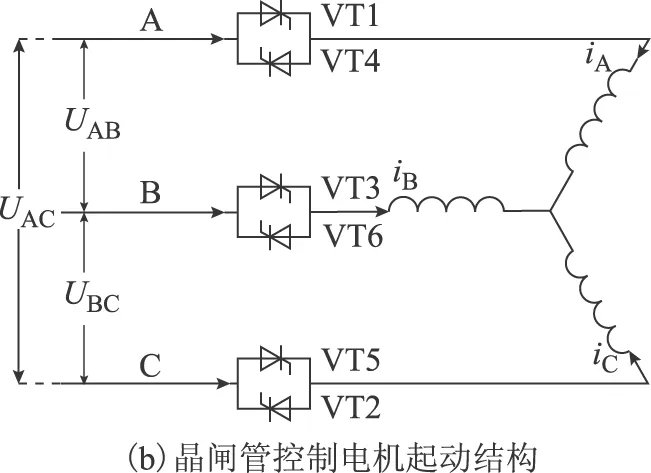
圖1 基于六邊形空間電壓矢量的控制電路Fig.1 The control circuit based on hexagonal space voltage vector
六邊形空間電壓矢量離散變頻具體實施步驟為:首先以A相電壓上升沿過零點為基準,以觸發(fā)角θ0觸發(fā)晶閘管VT1和VT2導通電壓UAC,電流IAC過零之后自然關(guān)斷;然后在下一個工頻周期以C相電壓下降沿過零點為基準,以觸發(fā)角θ1觸發(fā)VT3和VT2導通電壓UBC。依此循環(huán),在每次晶閘管關(guān)斷后的下一個工頻周期內(nèi)觸發(fā)下一個六邊形空間電壓矢量,7個工頻周期即可完成一圈六邊形電壓矢量的觸發(fā),由此得到的基于六邊形空間電壓矢量的離散變頻7分頻導通電壓波形如圖2所示。
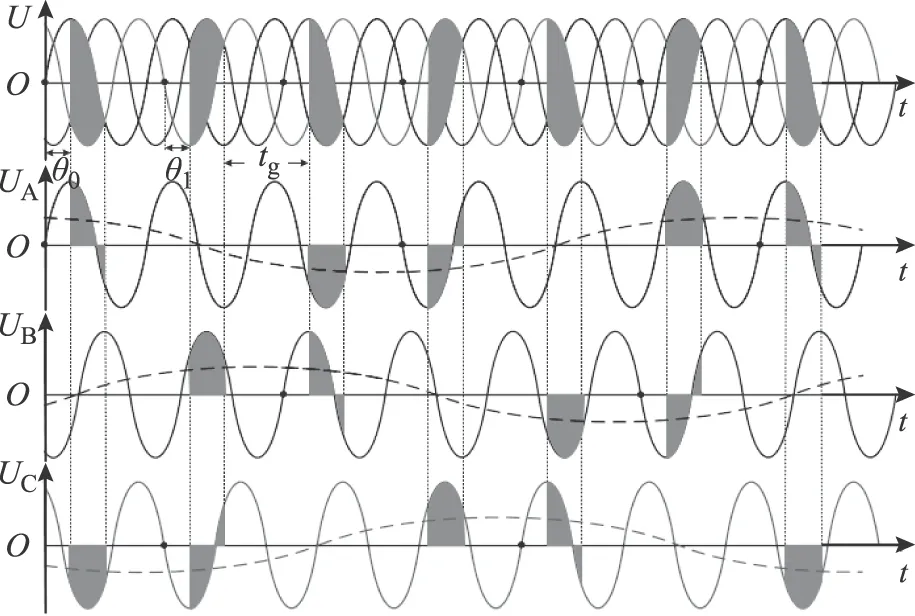
圖2 基于六邊形空間電壓矢量的7分頻原理示意圖Fig.2 The 7 frequency division chart based on hexagonal space voltage vector
由圖2可見,此種離散變頻方法是以獲得六邊形轉(zhuǎn)子磁鏈軌跡為控制目標,通過將離散化的六邊形空間電壓矢量有序地作用于定子繞組而實現(xiàn)的[19-21]。
1.2 空間電壓矢量離散變頻的磁鏈軌跡分析
定義在定子繞組軸線上互差2π/3的相電壓空間矢量uA0、uB0和uC0。將三相電壓矢量變換到兩相靜止x-y坐標系[22,23],其中A相電壓與兩相坐標系的x軸重合,則三相電壓的合成矢量u表示為
(2)

當觸發(fā)VT1和VT2時,只有電壓UAC導通,iC=0,此時兩相正弦導通電壓矢量uAC及其磁鏈表示為
(3)
(4)
當觸發(fā)VT3和VT2時,只有電壓UBC導通,iA=0,此時兩相正弦導通電壓矢量uBC及其磁鏈表示為
(5)
(6)
當觸發(fā)VT3和VT4時,只有電壓UBA導通,iC=0,此時兩相正弦導通電壓矢量uBA及其磁鏈表示為
(7)
(8)
當觸發(fā)VT5和VT4時,只有電壓UCA導通,iB=0,此時兩相正弦導通電壓矢量uCA及其磁鏈表示為
(9)
(10)
當觸發(fā)VT5和VT6時,只有電壓UCB導通,iB=0,此時兩相正弦導通電壓矢量uCB及其磁鏈表示為
(11)
(12)
當觸發(fā)VT1和VT6時,只有電壓UAB導通,iC=0,此時兩相正弦導通電壓矢量uAB及其磁鏈表示為
(13)
(14)
依此循環(huán)觸發(fā)uAC→uBC→uBA→uCA→uCB→uAB電壓即可在定子繞組上獲得六邊形空間電壓矢量,相應地在轉(zhuǎn)子上獲得基于正弦兩相電壓矢量的六邊形旋轉(zhuǎn)磁鏈,如圖1a所示。
2 磁鏈軌跡的衰減及離散變頻實現(xiàn)方法
2.1 空間電壓矢量變頻下的磁鏈衰減
基于六邊形空間電壓矢量的離散變頻首先是轉(zhuǎn)子磁鏈在兩相正弦電壓的作用下增長,持續(xù)一段時間后定子端電壓反向。然而由于漏電感的存在,電機定子繞組電流出現(xiàn)短暫的續(xù)流后為零,之后定子繞組電壓開路。由于磁場慣性的作用,轉(zhuǎn)子電流并不等于零,其衰減變化規(guī)律直接影響空間電壓矢量方法的可行性。三相晶閘管斷開后,轉(zhuǎn)子磁鏈在轉(zhuǎn)子閉合回路內(nèi)按電路時間常數(shù)自由衰減,轉(zhuǎn)軸在失去電磁轉(zhuǎn)矩后受機械阻力的作用而減速。當下一個空間電壓矢量作用時,定子電流從零開始增長。轉(zhuǎn)子磁鏈以上一個周期內(nèi)衰減的終值為初值沿電壓矢量方向繼續(xù)增長。
上一個電壓矢量作用結(jié)束到下一個電壓矢量作用開始的間隔時間tg=(7π/6+α)/ω,隨著α的不同,tgmax=23.33 ms,tgmin=13.33 ms。根據(jù)感應電機特性,對于一般用途的功率大于15 kW的電機,其轉(zhuǎn)子時間常數(shù)遠大于tg,如當觸發(fā)角α=90°時,tg=16.67 ms,此時15 kW感應電機轉(zhuǎn)子時間τr≈300 ms,所以有
ψr=ψ0e-tg/τr≈0.955ψ0
(15)
所以感應電機轉(zhuǎn)子磁鏈在三相斷續(xù)的間隔時間內(nèi)衰減很少,幾乎可以忽略不計,即電機能在基于空間電壓矢量的7分頻中穩(wěn)定運行。同理當電機工作在4、3 分頻時間隔時間變短,其衰減的影響類似。
2.2 六邊形空間電壓矢量下的4分頻方法
已知7分頻能獲得穩(wěn)定的三相正序電壓,電機起動運行平穩(wěn)。但電機在7分頻起動之后若直接切換到工頻50Hz則會由于頻率過渡范圍太大而產(chǎn)生電流瞬間上升和電磁轉(zhuǎn)矩驟降的現(xiàn)象,輕則會導致電機堵轉(zhuǎn)而無法正常起動,重則可能引發(fā)生產(chǎn)事故而影響生產(chǎn)進度。所以在7分頻起動之后插入4、3分頻有助于電機平穩(wěn)過渡到工頻電網(wǎng)。其中3分頻雖為不對稱電壓,但仿真和實驗表明其能在三相電網(wǎng)中穩(wěn)定運行,且轉(zhuǎn)矩較大。
基于空間電壓矢量的4分頻原理是在7分頻的基礎(chǔ)上,通過有選擇地減少電壓矢量間隔時間,將6個矢量兩兩合并觸發(fā)形成3個電壓導通區(qū)間,從而得到7分頻到4分頻的離散變頻,如圖3所示。
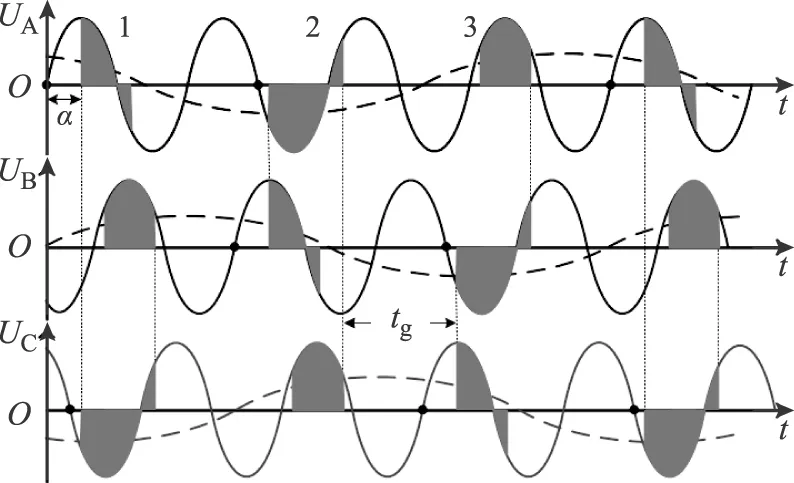
圖3 基于六邊形空間電壓矢量的4分頻原理示意圖Fig.3 The 4 division principle chart based on hexagonal space voltage vector
4分頻原理仍是基于六邊形轉(zhuǎn)子磁鏈軌跡控制,所不同的是4分頻將電壓矢量uAC和uBC、uBA和uCA、uCB和uAB合并在一個周期內(nèi)連續(xù)觸發(fā)導通了,所獲得的磁鏈ψAC和ψBC、ψBA和ψCA、ψCB和ψAB是三段連續(xù)且?guī)Щ《鹊墓饣壽E,每段磁鏈之間間隔tg時間。由此構(gòu)成磁鏈軌跡是較為圓滑的近似六邊形軌跡。
2.3 六邊形空間電壓矢量下的3分頻方法
由前面分析可知,3分頻得到的是不對稱三相電壓,但3分頻的3次諧波正好是工頻50 Hz,且仿真和實驗表明基于六邊形空間電壓矢量的3分頻運行穩(wěn)定、帶載能力強,可以利用3分頻作為過渡頻率,在感應電機從7分頻起動過渡到4、3分頻之后按一定規(guī)則切換到工頻斜坡升壓,完成起動過程。3分頻電壓波形如圖4所示,其中α=90°。
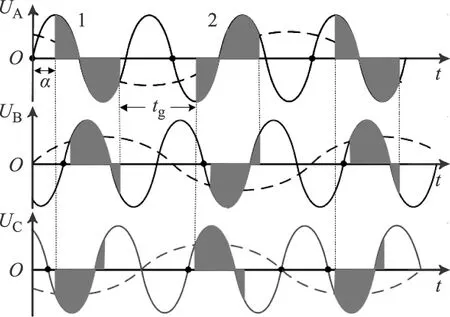
圖4 基于六邊形空間電壓矢量的3分頻原理示意圖Fig.4 The 3 division principle chart based on hexagonal space voltage vector
由圖4可見,3分頻是基于六邊形空間電壓矢量原理,將uAC、uBC和uBA,uCA、uCB和uAB合并在一個周期內(nèi)連續(xù)觸發(fā)導通而獲得的。3分頻可以分為兩個電壓導通區(qū)間,每個區(qū)間存在多種電壓導通狀態(tài)。如在區(qū)間1中首先觸發(fā)導通VT1和VT2,電機進入兩相電壓導通狀態(tài);然后在電壓UAC還未關(guān)斷之前觸發(fā)晶閘管VT3,電機從兩相導通過渡到三相導通狀態(tài);接著在觸發(fā)角α=90°時觸發(fā)導通VT4,電機維持三相導通狀態(tài)直到C相負半周電流過零,VT2自然關(guān)斷后又進入兩相導通狀態(tài);最后晶閘管VT3和VT4也隨著對應電流的過零而自然關(guān)斷,電機進入tg時間的磁鏈衰減過程。
2.4 空間電壓矢量離散變頻的切換方法
感應電機在離散變頻7分頻起動之后逐步提高頻率,然后才能順利切換到工頻額定電壓下完成起動[24,25]。離散變頻的切換方法有:①周期內(nèi)任意一點切換;②半周期點切換;③整周期點切換。
基于六邊形空間電壓矢量的離散變頻電壓每旋轉(zhuǎn)一圈為一個周期,所以為了電壓矢量周期的完整性,本文采用基于整周期切換的方法,即在離散頻率的整個周期觸發(fā)完成之后才切換到下一個頻率段。
電機在達到離散變頻3分頻額定轉(zhuǎn)速后,直接切換到工頻額定電壓會由于頻率和電壓瞬間變化過大而導致電機轉(zhuǎn)矩脈動劇烈,甚至引起電機機械故障。因此,在3分頻的16.7 Hz切換到工頻50 Hz時適當?shù)亟档碗妷海缓蟀葱逼律龎嚎焖僭黾拥筋~定電壓可以有效減小電流沖擊和轉(zhuǎn)矩脈動,從而實現(xiàn)感應電機離散變頻的無擾動切換。
3 仿真與實驗分析
3.1 仿真結(jié)果分析
為驗證基于空間電壓矢量的感應電機離散變頻起動性能,利用Matlab/Simulink設(shè)計仿真實驗,其中電機模型參數(shù)見附錄。
為了便于觀察電機變頻起動過程,適當延長各級頻率段運行時間。仿真過程中作者在不同的負載下做了多次實驗,考慮到實際應用的大多數(shù)情況,本實驗以電機60%的負載率從7分頻開始起動,之后切換到4、3分頻提高轉(zhuǎn)速,在3分頻穩(wěn)定轉(zhuǎn)速時快速無擾切換到工頻電網(wǎng)。電機從零速開始,經(jīng)7、4分頻的變頻控制到最后3分頻結(jié)束切換至工頻按斜坡升壓的整個起動過程的電流、轉(zhuǎn)速和電磁轉(zhuǎn)矩波形如圖5、圖6所示,其中斜坡升壓時間ts=0.4 s。
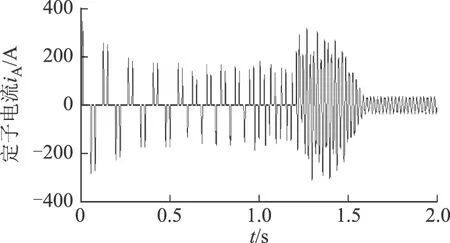
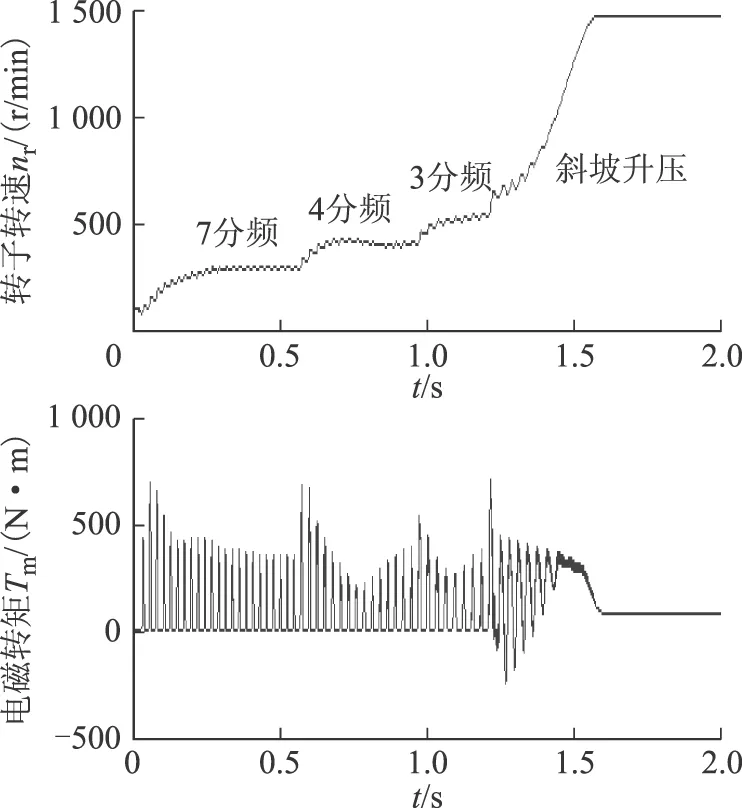
圖5 60%負載空間電壓矢量變頻起動到穩(wěn)態(tài)運行過程Fig.5 The running process of Space voltage vecto frequency conversion from start to steady state under 60% load

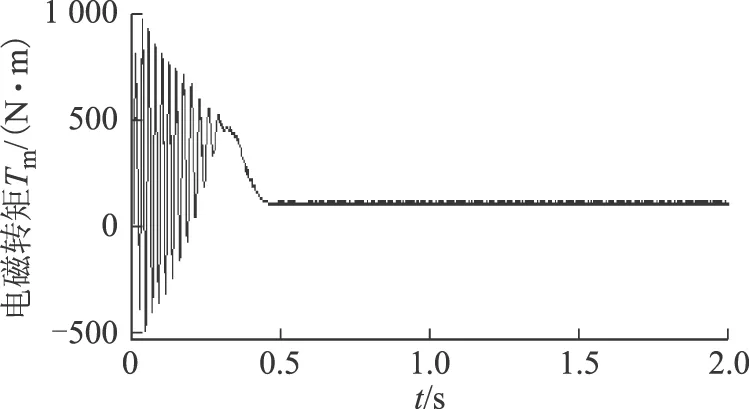
圖6 60%負載下斜坡升壓軟起動運行過程Fig.6 The running process of ramp soft start under 60% load
從圖5可見,感應電機在空間矢量變頻起動階段電機加速較為平穩(wěn),電磁轉(zhuǎn)矩無負轉(zhuǎn)矩,轉(zhuǎn)矩振蕩較小,初始起動瞬態(tài)電流較大,但電流有效值并不大,特別是在電機起動之后整個變頻過程電流較小,最大電流為183 A,出現(xiàn)在3分頻切換到工頻斜坡升壓的起動過程。圖6為電機從零速開始斜坡升壓起動的過程,最大電流達228 A,且轉(zhuǎn)矩正、負振蕩明顯。在相同負載轉(zhuǎn)矩下空間矢量變頻最大電流較斜坡升壓下降19.7%。
3.2 實驗結(jié)果分析
基于六邊形空間電壓矢量離散變頻的原理分析,完成控制算法的軟件設(shè)計和實驗測試。實驗平臺如圖7所示,其中測試用感應電機為角接22 kW異步電機,額定電流為42.9 A,使用磁粉制動器模擬負載,并用額定電壓為270 V的直流發(fā)電機測速,普源DS系列示波器記錄波形,鉗形電流表記錄電流有效值。
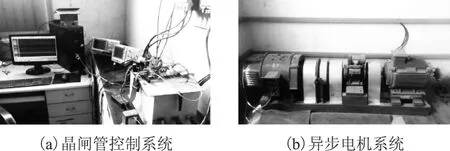
圖7 異步電機起動實驗平臺Fig.7 The experiment platform of induction motor
實驗測試過程異步電機負載率為60%,電機起動過程電壓、電流和速度曲線波形如圖8所示。
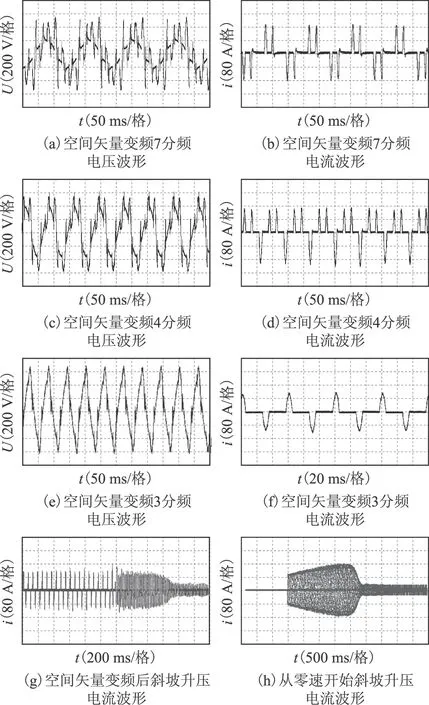
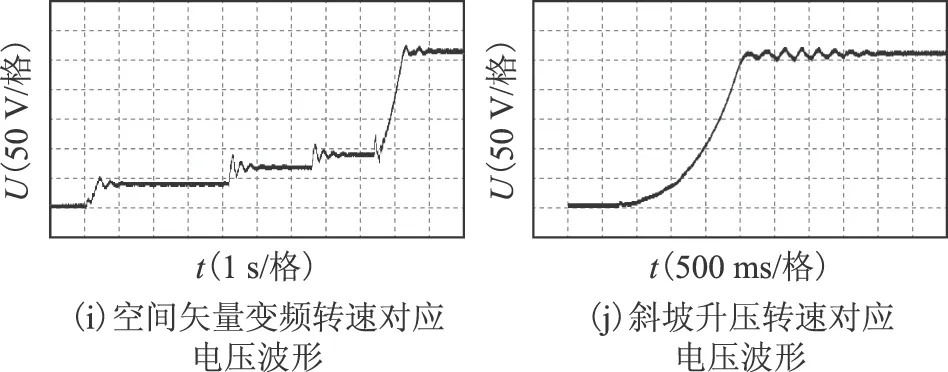
圖8 感應電機空間矢量變頻與斜坡升壓實驗波形Fig.8 The experimental waveforms of ramp andinduction motor space vector frequency conversion
圖8a~圖8f為空間矢量變頻7、4、3分頻的電壓、電流波形,由此可以明顯看到分頻后的電壓包絡(luò)線,電機在7分頻起動時電流峰值稍大,但電流有效值并不大,切換到4、3分頻運行時,電流的峰值幾乎不變,有效值還有所減小。從3分頻之后切換到工頻50 Hz斜坡升壓控制時,因為電機已有近500 r/min的轉(zhuǎn)速,所以與完全的斜坡升壓起動(圖8h)相比,電流有明顯減小。圖8i為空間矢量離散變頻轉(zhuǎn)速波形,可見電機轉(zhuǎn)速較為平穩(wěn)。圖8j為斜坡升壓轉(zhuǎn)速波形,電機在電壓升高到一定值后才開始加速起動。兩種起動方式的實驗對比見表1。
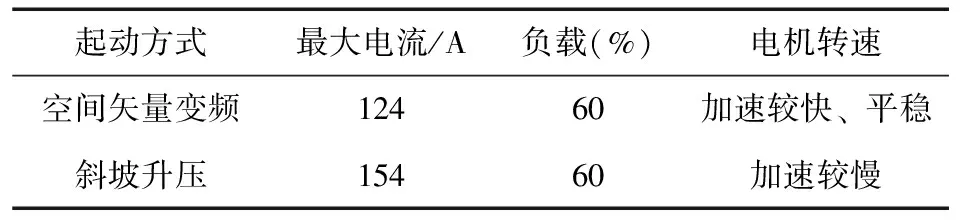
表1 空間矢量離散變頻與斜坡升壓起動實驗對比
從表1中可見,在相同負載率下,基于六邊形空間電壓矢量的離散變頻起動電流較從零速開始起動的斜坡升壓降低約19.5%,與仿真實驗一致,也即在相同的電流下起動轉(zhuǎn)矩提高19.5%,表明空間矢量變頻軟起動方法對提高起動轉(zhuǎn)矩或降低起動電流是有效的。
4 結(jié)論
本文基于六邊形空間電壓矢量原理提出一種高起動轉(zhuǎn)矩的電機起動方法,通過對電壓矢量的平移達到離散變頻的目的,合適的切換方法能實現(xiàn)離散頻率的無擾切換。最后通過仿真和實驗驗證了所提方法的有效性,并得到以下結(jié)論:
1)基于正弦電網(wǎng)的六邊形兩相空間電壓矢量在間隔時間tg足夠短的情況下,轉(zhuǎn)子磁鏈幾乎不衰減,電機能連續(xù)穩(wěn)定運行。
2)空間矢量離散頻率合理的切換方法能減小轉(zhuǎn)矩振蕩,實現(xiàn)轉(zhuǎn)速的無擾切換,使感應電機起動連續(xù)而平穩(wěn)。
3)通過仿真和實驗表明,基于空間電壓矢量的離散變頻感應電機起動方法在相同的負載率下能顯著降低起動電流,或在相同的起動電流下能提高起動轉(zhuǎn)矩,改善了感應電機的起動性能。這種方法在理論和實現(xiàn)上還有待進一步深入研究,但已經(jīng)顯現(xiàn)出所具有的技術(shù)和經(jīng)濟價值。
附 錄
仿真所用異步電機參數(shù):P=15 kW,Ue=380 V,ne=1 460 r/min,ie=29.5 A,fe=50 Hz,Lm=64.19 mH,Rs=0.214 7 Ω(20 ℃),Rr=0.220 5 Ω(20 ℃),J=0.602 kg·m2,Lsσ=Lrσ=0.991 mH。
[1]DeleroiW,WoudstraJB,FahimAA.Analysisandapplicationofthree-phaseinductionmotorvoltagecontrollerwithimprovedtransientperformance[J].IEEETransactionsonIndustryApplications, 1989, 25(2): 280-286.
[2]RowanTM,LipoTA.QuantitativeanalysisofinductionmotorperformanceimprovementbySCRvoltagecontrol[J].IEEETransactionsonIndustryApplications, 1983,IA-19(4): 545-553.
[3]IvanovAG,UshakovII.Analysisofstart-upregimesofaninductionmotorcontrolledbyathyristorregulator[J].RussianElectricalEngineering, 2007, 78(78): 532-536.
[4]ZenginobuzG,CadirciI,ErmisM,etal.Performanceoptimizationofinductionmotorsduringvoltage-controlledsoftstarting[J].IEEETransactionsonEnergyConversion, 2004, 19(2):278-288.
[5]NiedA,deOliveiraJ,deFariasCR,etal.Softstartingofinductionmotorwithtorquecontrol[J].IEEETransactionsonIndustryApplication, 2010, 46(3): 1002-1010.
[6]GinartA,EstellerR,MaduroA,etal.PerformanceimprovementinAC-ACSCRcontroller[C]//AppliedPowerElectronicsConferenceandExposition, 1998: 308-314.
[7]GinartA,EstellerR,MaduroA,etal.HighstartingtorqueforACSCRcontroller[J].IEEETransactionsonEnergyControl, 1999, 14(3): 553-559.
[8] 趙凱岐, 王毅, 徐殿國, 等. 晶閘管控制的感應電機中提高起動電磁轉(zhuǎn)矩的一種新策略[J]. 中國電機工程學報, 2004, 24(3): 145-150.ZhaoKaiqi,WangYi,XuDianguo,etal.Anewstrategytoimproveelectromagneticstartingtorqueforthyristorcontrolledinductionmotors[J].ProceedingsoftheCSEE, 2004, 24(3): 145-150.
[9]ZenginobuzG,CadirciI,ErmisM,etal.Softstartingoflargeinductionmotorsatconstantcurrentwithminimizedstartingtorquepulsations[J].IEEETransactionsonIndustryApplications, 2001, 37(5): 1334-1347.
[10]童軍, 張臻, 郭昌永. 電動機軟啟動功率因數(shù)角閉環(huán)控制技術(shù)研究[J]. 電機與控制學報, 2013, 17(12): 51-56.TongJun,ZhangZhen,GuoChangyong.Studyofpowerfactorangleclosed-loopcontroltechnologyinsoft-starter[J].ElectricMachinesandControl, 2013, 17(12): 51-56.
[11]孫津濟, 房建成, 王建民. 異步電動機軟起動過程中的振蕩[J]. 電工技術(shù)學報, 2007, 22(2): 15-21.SunJinji,FangJiancheng,WangJianmin.Oscillationinsoft-startingofinductionmotor[J].TransactionsofChinaElectrotechnicalSociety, 2007, 22(2): 15-21.
[12]昝小舒, 陳昊. 開關(guān)磁阻起動/發(fā)電系統(tǒng)起動性能研究[J]. 電工技術(shù)學報, 2015, 30(20): 21-30.ZanXiaoshu,ChenHao.Studyonthestartingperformanceofswitchedreluctancestarter/generatorsystem[J].TransactionsofChinaElectrotechnicalSociety, 2015, 30(20): 21-30.
[13]吳瑕杰,宋文勝,馮曉云.一種在線計算多模式空間矢量調(diào)制算法及其FPGA實現(xiàn)[J]. 電工技術(shù)學報, 2016, 31(20): 124-133.WuXiajie,SongWensheng,FengXiaoyun.Anon-linecalculationmulti-modeSVPWMalgorithmandimplementationbasedonFPGA[J].TransactionsofChinaElectrotechnicalSociety, 2016, 31(20): 124-133.
[14]李政學,張永昌,李正熙,等. 異步電機新型占空比直接轉(zhuǎn)矩控制方案[J]. 電工技術(shù)學報, 2015, 30(24): 23-30.LiZhengxue,ZhangYongchang,LiZhengxi,etal.Anoveldirecttorquecontrolstrategyofinductionmachinedriveswithsimpledutyratiocalculation[J].TransactionsofChinaElectrotechnicalSociety, 2015, 30(24): 23-30.
[15]孟彥京, 張陳斌, 陳君, 等. 一種用于軟起動的電壓空間矢量控制裝置及其控制方法: 中國,CN103633910A[P]. 2014-03-12.
[16]孟彥京, 李林濤, 段明亮, 等. 一種磁場矢量控制軟起動器及其控制方法: 中國,CN103618480A[P]. 2014-03-05.
[17]孟彥京, 張陳斌, 陳君, 等. 一種基于正弦波電壓空間矢量的新型軟起動器[J]. 電力電子技術(shù), 2014, 29(7): 28-35.MengYanjing,ZhangChenbin,ChenJun,etal.Anovelsoftstarterbasedonsinewavevoltagespacevector[J].PowerElectronics, 2014, 29(7): 28-35.
[18]王成元, 夏加寬, 孫宜標. 現(xiàn)代電機控制技術(shù)[M]. 北京: 機械工業(yè)出版社, 2014.
[19]湯蘊璆, 張奕黃, 范瑜. 交流電機動態(tài)分析[M]. 北京: 機械工業(yè)出版社, 2008.
[20]許大中. 交流電機調(diào)速理論[M]. 浙江: 浙江大學出版社, 1994.
[21]馮惕, 王儉. 基于定子電壓空間矢量感應電動機的轉(zhuǎn)速控制[J]. 電工技術(shù)學報, 2014, 29(1): 123-130.FengTi,WangJian.Inductionmotorspeedcontrolbasedonstatorvoltagespacevector[J].TransactionsofChinaElectrotechnicalSociety, 2014, 29(1): 123-130.
[22]張興華, 石萬, 李磊. 感應電機直接轉(zhuǎn)矩控制系統(tǒng)的新型滑模定子磁鏈觀測器[J]. 電氣傳動, 2014, 44(10): 3-6.ZhangXinghua,ShiWan,LiLei.Novelstatorfluxsliding-modeobserverfordirecttorquecontrolled[J].InductionMotorDrivingSystems, 2014, 44(10): 3-6.
[23]張杰, 柴建云, 孫旭東, 等. 雙三相異步電機電流預測控制算法[J]. 電工技術(shù)學報, 2015, 30(9): 12-21.ZhangJie,ChaiJianyun,SunXudong,etal.Predictivecurrentcontrolmethodsfordualthreephaseinductionmachine[J].TransactionsofChinaElectrotechnicalSociety, 2015, 30(9): 12-21.
[24]賈媛, 佟威, 李紅蓮, 等. 基于模糊自適應控制的電動機軟起動仿真[J]. 電氣技術(shù), 2009(9): 63-65.JiaYuan,TongWei,LiHonglian,etal.Simulationofsoftstartupcontrolsystemformotorbasedonfuzzyadaptivecontrol[J].ElectricalEngineering, 2009(9): 63-65.
[25]崔學深, 張自力, 李和明,等. 感應電機電源切換中殘壓和電壓差的研究及最優(yōu)切換策略[J]. 電工技術(shù)學報, 2015, 30(2): 162-171.CuiXueshen,ZhangZili,LiHeming,etal.Residualvoltage,voltagedifferenceandoptimalswitchingstrategyduringthepowerswitchingofinductionmotors[J].TransactionsofChinaElectrotechnicalSociety, 2015, 30(2): 162-171.
(編輯 于玲玲)
A Starting Method of Induction Motor with High Starting Torque
ChenJunMengYanjingDuanMingliangMaHuihaiGaoZeyu
(School of Electrical and Information Engineering Shaanxi University of Science & Technology Xi′an 710021 China)
Based on the basic principle of the hexagonal space voltage vector, a starting control method of induction motor with high starting torque is proposed. Firstly, the principle of realizing discrete frequency conversion by using hexagonal space voltage vector on the power frequency sine grid is analyzed, and its feasibility from rotor rotating flux track is proved. Then, the unattenuated flux in the current interrupted time of space voltage vector frequency conversion is illustrated by using the characteristic of high power induction motor, the multilevel discrete variable frequency based on hexagonal phase space voltage vector is realized through the translation of the voltage vector. The impact of the frequency switching process is minimized by using a specific frequency switching mode, the purpose of discrete frequency conversion without interference is almost achieved. Lastly, through the comparison between the simulation and the measured results, the effectiveness of the proposed method is verified. The purpose of reducing starting current and improving torque is reached, having certain theoretical research and practical application value.
Discrete variable frequency, rotor flux, high starting torque, space voltage vector, induction motor
國家自然科學基金項目資助(51577110)。
2016-01-27 改稿日期2017-01-03
TM301.2
陳 君 男,1988年生,碩士研究生,研究方向為電力電子技術(shù)與電機變頻控制。
E-mail:252516599@qq.com(通信作者)
孟彥京 男,1956年生,教授,博士生導師,研究方向為電力電子與電力傳動、電機控制與變頻調(diào)速。
E-mail:junfhe@163.com