環形繞組無刷直流電機負載換向的解析模型
2017-05-16 01:08:11林黃達程思為賈喆武
電工技術學報 2017年9期
關鍵詞:模型
林黃達 王 東 程思為 賈喆武
(海軍工程大學艦船綜合電力技術國防科技重點實驗室 武漢 430033)
?
環形繞組無刷直流電機負載換向的解析模型
林黃達 王 東 程思為 賈喆武
(海軍工程大學艦船綜合電力技術國防科技重點實驗室 武漢 430033)
環形繞組無刷直流(CWBLDC)電機是一種具有梯形波反電動勢的多相永磁電機,相應的換向驅動電路可實現相電流的換向。由于該電機采用梯形波反電動勢,鐵心材料的利用更加充分,能獲得高于永磁同步電機(PMSM)的轉矩密度;另一方面,采用極、槽數優化設計的分數槽繞組,能夠有效抑制電機的轉矩脈動,使其接近永磁同步電機的水平。良好的換向性能是該電機得以應用的前提,本文提出一種負載換向方法,其利用負載本身的電壓即電機反電動勢來改變相電流的方向,能夠實現功率開關的零電流關斷。以一臺2極12槽環形繞組無刷直流電機為對象,詳細分析了負載換向的過程,建立了換向過程的解析模型,討論了換向提前角的確定方法。采用場路耦合仿真分析了該電機的換向過程,驗證了解析模型的準確性,最后由原理樣機試驗驗證了負載換向原理的可行性。
無刷直流電機 環形繞組 負載換向 解析模型
0 引言
艦船綜合電力系統是現代艦船動力平臺的一次革新,是未來艦船動力的主要發展方向[1]。推進電機是艦船綜合電力系統的關鍵技術,研制大容量、高轉矩密度、低振動噪聲的推進電機系統具有強烈的工程需求。先進感應電機已在電力推進領域中取得了成功應用,而永磁推進電機以更高的效率、更高的轉矩密度和更低的振動噪聲,已成為電力推進系統的重要發展方向。
采用正弦電流供電的永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)已得到廣泛應用[2],其理論上幾乎沒有轉矩脈動,從而具有優秀的振動噪聲特性[3-5],但其控制方式復雜,轉矩密度提升空間有限。無刷直流(Brushless Direct Current, BLDC)電機的反電動勢接近方波,鐵心材料利用更加充分,轉矩密度更大,但受轉矩脈動大的制約[6-8],難以在大容量高性能電力推進場合中獲得廣泛應用。
目前針對無刷直流電機轉矩脈動抑制方法的研究主要從控制角度出發,所提出的抑制方法復雜,效果一般[9-13]。本文從電機拓撲結構出發,借鑒有刷直流電機的環形電樞繞組,將多相環形繞組應用于無刷直流電機,提出了一種環形繞組無刷直流(Circular Winding Brushless Direct Current, CWBLDC)電機[14,15]。圖1為一臺2極12槽環形繞組無刷直流電機的基本結構及相應的換向驅動電路,其中SH表示高壓側功率開關,SL表示低壓側功率開關。

圖1 2極12槽環形繞組無刷直流電機的基本結構Fig.1 Basic structures of 2-pole, 12-slot CWBLDC machine and commutation circuit
該電機定子繞組的聯結方式類似于三相電機的三角形聯結或五相電機的五邊形聯結,由各相繞組首尾連接組成,但相數更多且構成環形。如果采用極、槽數優化設計的分數槽繞組結構,能夠有效抑制電機的換向轉矩脈動,接近永磁同步電機的水平[14]。
為了保證輸出穩定的電磁轉矩,相電流需要隨轉子磁極的位置改變方向。由于CWBLDC電機的換向驅動電路及換向過程較為復雜,三相無刷直流電機的換向方法及過程分析并不適用,而換向過程無論對電機的順利運行還是對轉矩性能和振動噪聲特性都有直接的影響,因此必須首先解決該電機相電流的換向問題。
繞組星形聯結的多相無刷直流電機,其換向方法與傳統三相無刷直流電機無本質區別[16],不適用于CWBLDC電機。Zhu Li等[17,18]提出一種應用于電動汽車的閉合繞組無刷直流電機,繞組結構與環形繞組無刷直流電機相似,但其采用集中分數槽繞組,且沒有介紹相電流的換向方法,更沒有詳細分析換向過程。
本文針對環形繞組無刷直流電機特殊的繞組結構,提出了一種負載換向方法,它通過負載電壓即電機反電動勢改變電流方向,能夠實現功率開關的零電流關斷。首先介紹負載換向的原理,給出電機運行在負載換向的解析模型,然后利用解析模型確定換向提前角,最后通過場路耦合仿真及原理樣機試驗驗證解析模型。
1 負載換向方法
負載換向方法在反電動勢極性改變之前同時導通相繞組兩側的功率開關,相繞組被短路后其電流在自身反電動勢的作用下換向。本文以圖1所示的2極、12槽、12相CWBLDC電機為分析對象,負載換向過程如圖2所示,功率器件采用半控器件晶閘管。
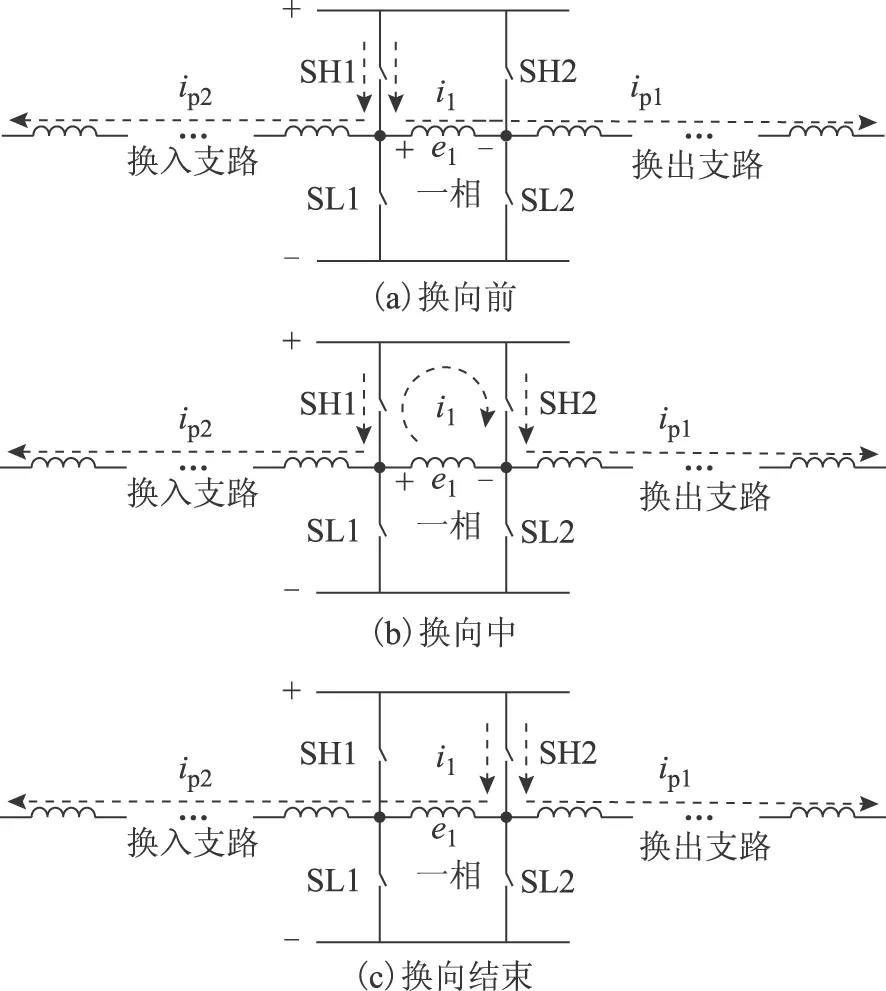
圖2 負載換向原理Fig.2 Load commutation of CWBLDC
狀態1:如圖2a所示,電機中沒有相繞組電流在換向,SH1導通,電機的相繞組被分為2p條并聯支路,其中2p為極數。相鄰兩條并聯支路中的電流方向相反,如ip1和ip2。此時一相繞組電流為ip1。
狀態2:當轉子d軸軸線旋轉至接近一相軸線位置時,一相反電動勢開始下降并改變極性,為了保證輸出方向不變的穩定轉矩,一相繞組的電流必須改變方向。在一相反電動勢改變極性之前導通SH2,這時一相繞組的電流方向與反電動勢極性相反,且一相繞組被同時導通的SH1和SH2短路,因此相繞組電流在自身反電動勢的作用下改變方向,如圖2b所示。
狀態3:如圖2c所示,當一相繞組電流在自身反電動勢的作用下由ip1改變至ip2時,SH1中的電流下降為零,如果此時SH1的信號已經提前拉低,那么SH1將在一相反電動勢的反向偏置作用下關斷。
由于相電流在負載電壓即電機反電動勢的作用下換向,因此這種換向方法被稱為負載換向,其關鍵是在換向相反電動勢極性改變前某一時刻導通下一狀態的功率開關。
2 解析模型推導的基本假設與簡化
本節解析分析圖1所示極、槽結構電機的換向過程,實際設計中一般采用分數槽繞組來降低換向轉矩脈動,其換向過程較為復雜,但分析方法與整數槽繞組一致。
分析中忽略電樞反應對反電動勢的影響,假設各相反電動勢為理想梯形波,一相~六相反電動勢波形假設如圖3所示。
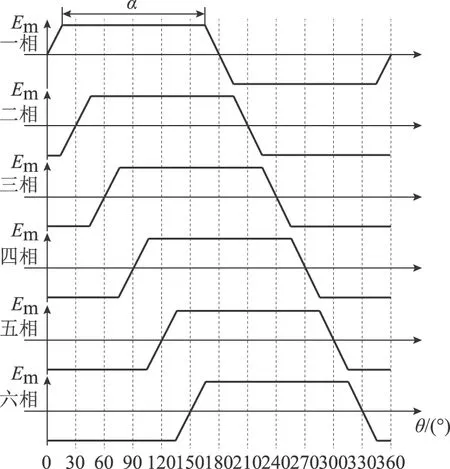
圖3 電機反電動勢的梯形波假設Fig.3 Assumed back EMFs of CWBLDC
梯形波平頂部分的寬度為α電角度,平頂部分反電動勢幅值為Em。為便于分析,假設任意時刻一極的6相繞組中至多有1相繞組的反電動勢處于變化狀態,這要求α不能小于5/6π。實際上,在環形繞組無刷直流電機的設計中,為充分利用電機的鐵磁材料,往往采用單位極弧系數的轉子永磁體設計,因此該假設是成立的。
如圖4所示,不考慮相鄰兩相繞組同時換向,根據換向提前角β的不同,換向起始時刻電機和驅動電路可分為以下3種狀態:


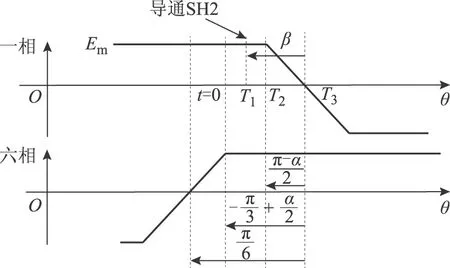
圖4 換向提前角βFig.4 Commutation lead time β
假設換向前驅動電路已經處于穩態,繞組與各支路的初始狀態電流可由外加直流電壓U、繞組反電動勢Em、繞組電阻R計算得到。
3 負載換向解析模型的推導
本文僅給出第2種狀態的解析推導,其他兩種狀態推導過程類似。規定六相反電動勢到達平頂部分的時刻為初始時刻t=0,T1時刻開始換向,T2時刻一相反電動勢開始下降,T3時刻反電動勢下降為零。換向時間的規定如圖4所示。
3.1 換向前穩態
此時圖1中的功率開關SH1和SL7導通,驅動電路可以等效為圖5。
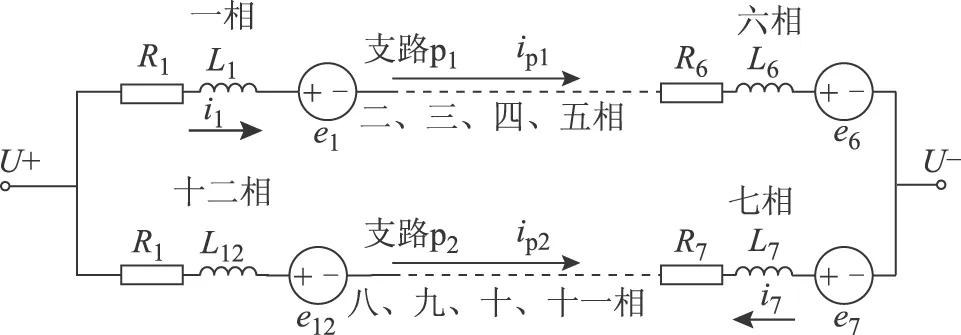
圖5 換向前等效電路Fig.5 Equivalent circuit of state before commutation
T1時刻,一相繞組和p1支路的初始電流為
(1)
由于對稱關系,p2支路的電流ip2與ip1相等。
3.2 開始換向至繞組反電動勢開始下降
此時圖1中功率開關SH1、SH2和SL7、SL8導通,一相和七相繞組被短路,等效電路如圖6所示。一相、七相繞組的電流i1、i7在反電動勢e1、e7的作用下換向。由于未換向支路兩端施加的電壓增大,支路電流ip1、ip2將增大。
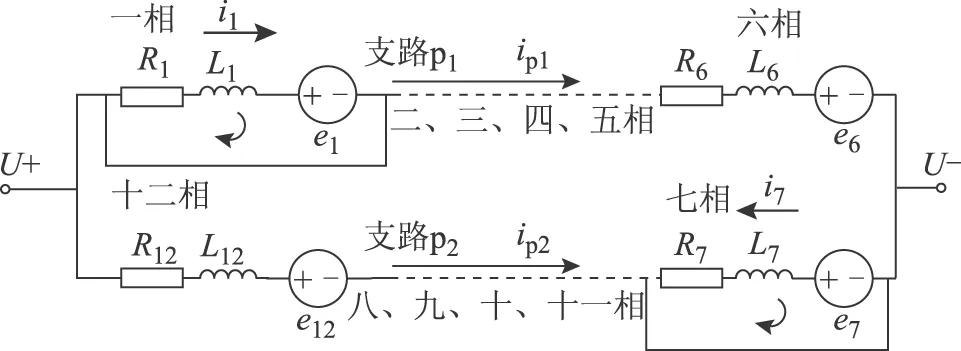
圖6 換向等效電路Fig.6 Equivalent circuit of state during commutation
一相繞組短路回路的KVL微分方程為
(2)
式中,L為相繞組的自感;M1-7為一相繞組與七相繞組的互感;M1-p1為一相繞組與p1支路的互感;M1-p2為一相繞組與p2支路的互感。
由于一相繞組與七相繞組、p1支路與p2支路完全對稱,因此有
i1=-i7
(3)
另外根據計算,M1-p1與M1-p2均為零,即可以不考慮一相繞組與p1支路、p2支路的互感。于是式(2)可以簡化為
(4)
該單變量一階微分方程可以方便的解析求解。
對于p1支路,其KVL微分方程為
(5)
式中,Lp1為p1支路的自感;Mp1-1為p1支路與一相繞組的互感;Mp1-7為p1支路與七相繞組的互感;Mp1-p2為p1支路與p2支路的互感。同樣的,經計算得到Mp1-1與Mp1-7均為零,由電機對稱性有
ip1=-ip2
(6)
因此式(5)可以化簡為
(7)
于是p1支路的KVL微分方程同樣化簡為易解析求解的單變量一階微分方程。
式(4)、式(7)的解析解為
(8)
(9)
3.3 反電動勢開始下降至換向結束
從T2時刻開始,一相反電動勢按式(10)下降。
(10)
此時一相繞組電流隨時間的變化滿足以下關系
(11)
T2時刻電流的初始值為
(12)
解得一相電流為
(13)
支路電流仍按式(9)規律變化。
根據負載換向的原理,換向成功的條件是相電流i1在反電動勢e1極性改變前與p2支路的電流ip2相等,即滿足
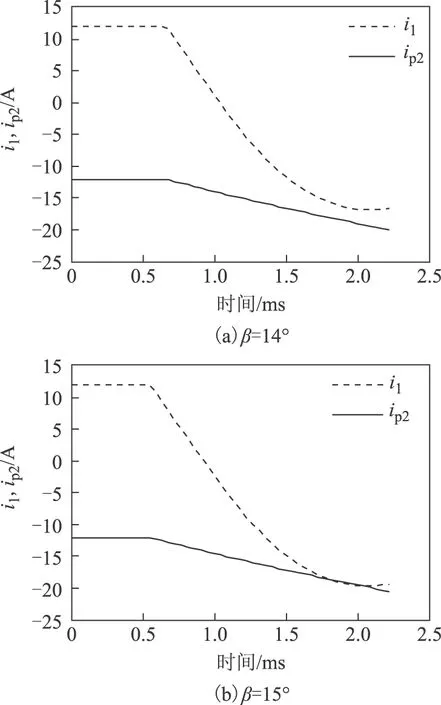
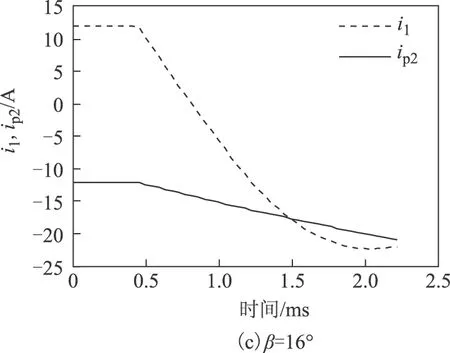
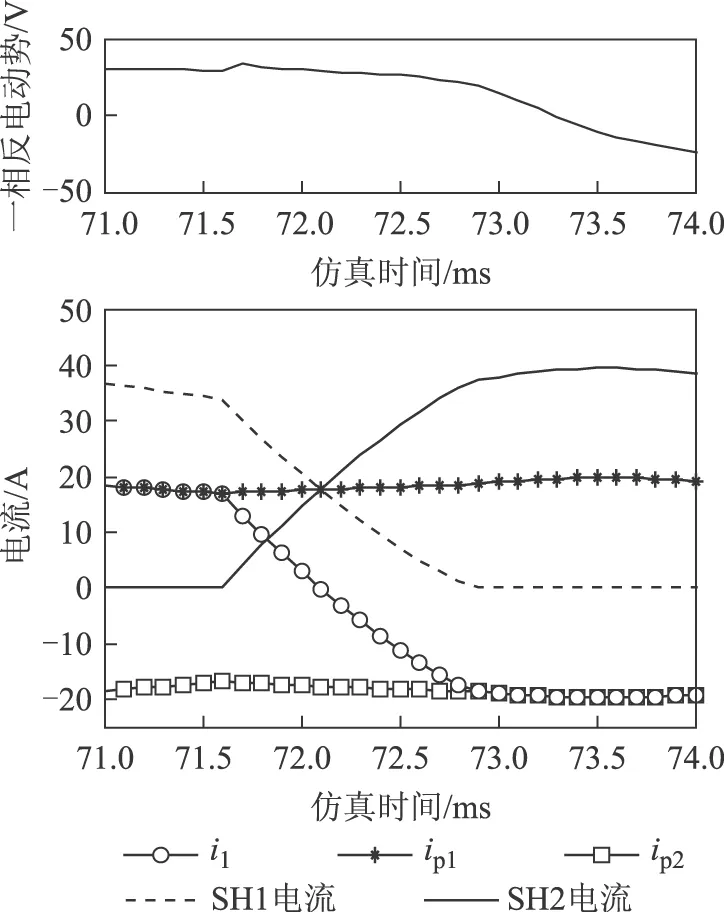
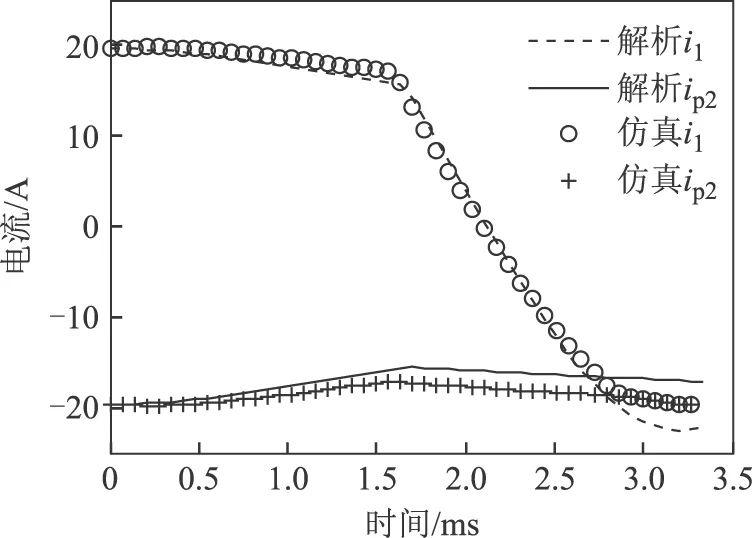
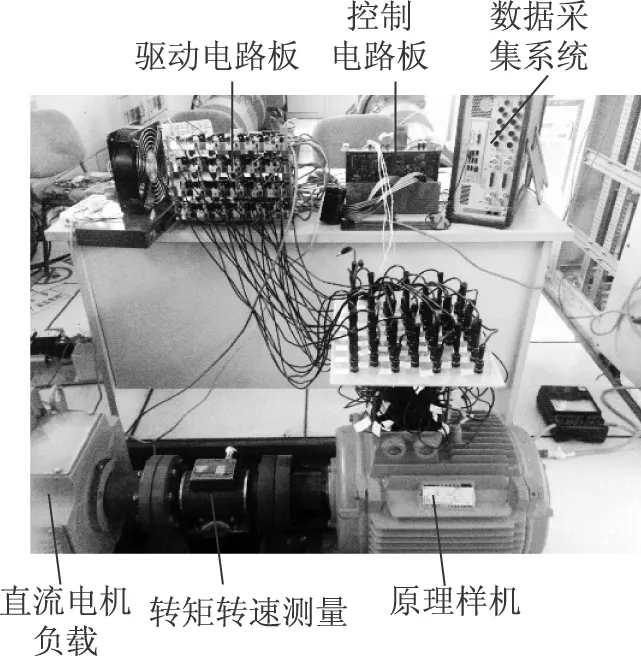
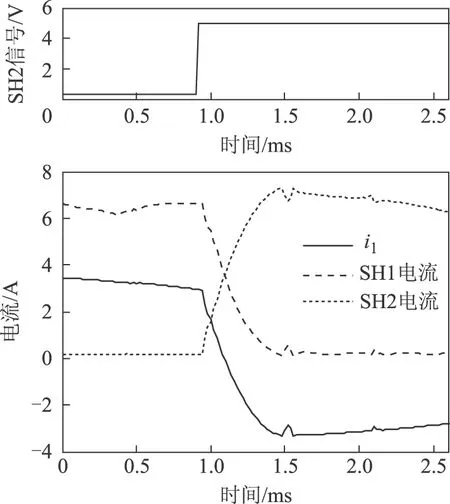
i1(t)=ip2(t)=-ip1(t)T1≤t (14) 3.4 模型參數的計算 反電動勢與支路電感是解析模型的重要參數,本節介紹它們的獲取方法。 獲取反電動勢的關鍵是得到圖3中梯形波平頂部分的寬度α與幅值Em。為使理想梯形波假設的誤差盡量小,采用最小二乘法獲得與實際波形最接近的理想梯形波,便得到了反電動勢的兩個參數。 求取支路電感首先需要計算各相繞組的自感與互感,它們的計算方法與無刷直流電機的電感計算類似[19],這里不再贅述,在得到電機相繞組的電感矩陣后能夠很容易地得到支路自感與互感,這里以p1支路的自感Lp1為例說明計算過程。 由繞組自感定義,p1支路自感為支路中所有串聯相繞組(二相、三相、四相、五相、六相)磁鏈之和與支路電流ip1的商,即 (15) 電流ip1在p1支路各相繞組產生的磁鏈為 (16) 式中,Mi-j為各相繞組互感。二相~六相繞組的電流均為ip1,p1支路自感為 (17) 因此支路電感可以通過相繞組自感與互感的累加計算得到。 電機運行在負載換向時,若換向提前角β過小,在反電動勢極性改變前還未完成換向,將導致功率開關無法正常關斷,影響電機運行。若β過大,電機的功率因數降低,轉矩密度下降。因此,確定合適的換向提前角十分必要。 從第3節的推導可以看出,影響換向提前角的因素主要有兩點,即電機相繞組的電感和相電流的幅值。相繞組電感越大,電流的變化速率越慢,因此需要更大的提前換向角。環形繞組無刷直流電機在設計時應盡量使電感取得較小值,避免過大的換向提前角。相電流越大,換向時電流的變化越大,所需換向提前角越大。因此隨著電機負載增大,換向提前角也應相應增大。 若能求解式(14)成立時換向開始時刻T1的極值,便能得到最合適的β,但該式的解析求解非常困難。因此實際分析中采用數值的方法,不斷增加β直到式(14) 成立。 本文以一臺10極、60槽、12相環形繞組無刷直流電機為例說明β的確定方法。10極60槽電機由 5個2極12槽單元電機組成,其換向過程與以上分析相同。 電機的主要參數見表1。 由于該電機反電動勢平頂波寬度α約為160°,因此一相開始換相時,一相與六相反電動勢不變的提前角范圍為10°≤β<20°。換向開始時刻電流為12A,β分別為14°、15°、16°時i1、ip2的波形如圖7所示。 表1 電機主要參數 圖7 β=14°、15°、16°時解析模型的換向電流波形Fig.7 Analytical current waveform at β=14°、β=15°、β=16° 圖7a中,β=14°時,i1與ip2沒有在反電動勢極性改變前相等,因此換向失敗;圖7c中,β=16°時,i1與ip2能夠在換向過程相等,且換向提前角還有裕量。因此β=15°是合適的換向提前角。 本文利用場路耦合仿真驗證解析模型。場路耦合仿真將電機的有限元模型和驅動電路通過電壓和電流接口有機地結合成一個整體,這種方法能夠精確地分析驅動電路與電機間的相互作用。 圖8為β=15°、電流為18 A時換向過程的仿真結果。SH2在反電動勢改變極性之前導通,i1在自身反電動勢的作用下開始反向,當i1與ip2相等時,SH1中的電流下降為零并關斷,符合所描述的負載換向過程。 圖8 負載換向過程的場路耦合仿真結果Fig.8 Simulated voltage (top) and current (bottom) waveforms during load commutation 接下來在相同工況下比較解析模型與場路耦合仿真在β同為15°時的電流波形,如圖9所示。 圖9 負載換向解析模型的場路耦合仿真驗證Fig.9 Analytical and simulated current waveform in commutation interval 從圖9可以看出,解析模型與場路耦合仿真的計算結果基本一致,換向相電流i1與支路電流ip2的變化速率一致,換向結束的時刻相同,說明本文建立的解析模型準確,分析負載換向過程的精度較高。 本文制造了一臺10 kW,8極46槽分數槽CWBLDC電機,如圖10所示,其轉矩脈動遠小于所分析的2極12槽結構。分數槽繞組電機的換向過程更加復雜,無法得到電流的解析解,這里給出換向過程的試驗結果,驗證負載換向原理的可行性。 圖10 CWBLDC電機試驗平臺Fig.10 Experiment platform of CWBLDC machine 在電機運行轉速600 r/min時測量一相繞組電流i1與流過功率開關SH1、SH2的電流,結果如圖11所示。 圖11 換向過程的試驗結果Fig.11 Experiment results of load commutation 圖11顯示,功率開關SH2導通后,i1在反電動勢的作用下開始換向,同時流過SH1的電流開始下降,換向完成時SH1的電流同時下降為零。樣機試驗結果表明負載換向的原理可行,且能夠實現功率開關的零電流關斷,對電機驅動系統的電壓、電流沖擊小。 本文提出了環形繞組無刷直流電機的負載換向方法,該方法通過在換向相反電動勢極性改變前導通下一狀態的功率開關,改變相電流的方向,能夠實現功率開關的零電流關斷,對電機系統的電壓、電流沖擊小。 為了說明負載換向的原理,分析換向的物理過程,推導了負載換向的解析模型并利用場路耦合仿真驗證,驗證結果表明解析模型具有較高的準確度,根據解析模型給出了換向成功的條件并得到了所需換向提前角的理論依據,最后由原理樣機試驗驗證了負載換向原理的可行性。 [1] 馬偉明. 艦船動力發展的方向——綜合電力系統[J]. 海軍工程大學學報, 2002, 14(6): 1-5. Ma Weiming. Integrated power system-trend of ship development[J]. Journal of Naval University of Engineering, 2002, 14(6): 1-5. [2] 姚文龍, 張均東, 張桂臣. 吊艙推進電機及其關鍵技術發展綜述[J]. 電工技術學報, 2012, 27(3): 35-49. Yao Wenlong, Zhang Jundong, Zhang Guichen. Development of the propulsion motor and its key technologies for ship podded system[J]. Transactions of China Electrotechnical Society, 2012, 27(3): 35-49. [3] 王磊, 李穎暉, 朱喜華, 等. 存在擾動的永磁同步電機混沌運動模糊自適應同步[J]. 電力系統保護與控制, 2011, 39(11): 30-36. Wang Lei, Li Yinghui, Zhu Xihua, et al. Chaos synchronization of permanent magnet synchronous motor with disturbance using fuzzy adaptive logic[J]. Power System Protection and Control, 2011, 39(11): 30-36. [4] 楊浩東, 陳陽生, 鄧志奇. 永磁同步電機常用齒槽配合的電磁振動[J]. 電工技術學報, 2011, 26(9): 24-30. Yang Haodong, Chen Yangsheng, Deng Zhiqi. Electromagnetic vibration of PM synchronous motors with different combinations of slot and pole number[J]. Transactions of China Electrotechnical Society, 2011, 26(9): 24-30. [5] 方程, 許海平, 薛劭申, 等. 直驅型多相永磁同步電機定子磁動勢與氣隙磁密特性分析[J]. 中國電機工程學報, 2013, 33(24): 106-113. Fang Cheng, Xu Haiping, Xue Shaoshen, et al. Analysis of stator MMF and air gap flux density characteristics of direct-drive multi-phase permanent magnet synchronous machines[J]. Proceedings of the CSEE, 2013, 33(24): 106-113. [6] Berendsen C, Champenois G, Bolopion, A. Commutation strategies for brushless DC motors: influence on instant torque[J]. IEEE Transactions on Power Electronics, 1993, 8(2): 231-236. [7] 羅宏浩, 吳峻, 趙宏濤, 等. 永磁無刷直流電機換相控制研究[J]. 中國電機工程學報, 2008, 28(24): 108-112. Luo Honghao, Wu Jun, Zhao Hongtao, et al. Commutation control of permanent brushless DC motors[J]. Proceedings of the CSEE, 2008, 28(24): 108-112. [8] 王大方, 卜德明, 朱成, 等. 一種減小無刷直流電機換相轉矩脈動的調制方法[J]. 電工技術學報, 2014, 29(5): 160-166. Wang Dafang, Bu Deming, Zhu Cheng, et al. A modulation method to decrease commutation torque ripple of brushless DC motors[J]. Transactions of China Electrotechnical Society, 2014, 29(5): 160-166. [9] 盛田田, 王曉琳, 顧聰, 等. 一種使用重疊換相法的無刷直流電機平均轉矩控制[J].中國電機工程學報,2015,35(15):3939-3947. Sheng Tiantian, Wang Xiaolin, Gu Cong, et al. An average torque control method for brushless DC motors using overlap commutation strategy[J]. Proceedings of the CSEE, 2015, 35(15): 3939-3947. [10]林平, 韋鯤, 張仲超. 新型無刷直流電機換相轉矩脈動的抑制控制方法[J]. 中國電機工程學報, 2006, 26(3): 153-158. Lin Ping, Wei Kun, Zhang Zhongchao. A novel control scheme to suppress the commutation torque ripple in BLDCM[J]. Proceedings of the CSEE, 2006, 26(3): 153-158. [11]張立偉, 毛學宇. 基于電動汽車的無刷直流電機低轉矩脈動混合矢量驅動控制[J]. 電工技術學報, 2015, 30(2): 71-81. Zhang Liwei, Mao Xueyu.A low torque ripple hybrid vector drive system for brushless direct current motor applied to electric vehicles[J]. Transactions of China Electrotechnical Society, 2015, 30(2): 71-81. [12]王曉遠, 傅濤, 王曉光. 基于電流預測控制的無刷直流電動機換相轉矩脈動抑制[J]. 電工技術學報, 2015, 30(11): 22-29. Wang Xiaoyuan, Fu Tao, Wang Xiaoguang. Current prediction control strategy for commutation torque ripple reduction in brushless DC motor[J]. Transactions of China Electrotechnical Society, 2015, 30(11): 22-29. [13]史婷娜, 李聰, 姜凱國, 等. 基于無模型預測控制的無刷直流電機換相轉矩波動抑制策略[J]. 電工技術學報, 2016, 31(15): 54-61. Shi Tingna, Li Cong, Jiang Guokai, et al. Model free predictive control method to suppress commutation torque ripple for brushless DC motor[J]. Transactions of China Electrotechnical Society, 2016, 31(15): 54-61. [14]Wang Dong, Lin Huangda, Cheng Siwei, et al. A novel circular winding brushless DC (CWBLDC) machine with low torque ripple[C]//IECON 2015-41st Annual Conference of the IEEE Industrial Electronics Society, 2015: 001585-001591. [15]Lin Huangda, Cheng Siwei, Wang Dong, et al. Load commutation of the circular winding brushless DC machine (CWBLDC)[C]//IECON 2015-41st Annual Conference of the IEEE Industrial Electronics Society, 2015: 002741-002746. [16]Moon J J, Lee W, Park S W, et al. Fault tolerant control method of seven-phase BLDC motor in asymmetric fault condition due to open phase[C]//Power Electronics and ECCE Asia (ICPE-ECCE Asia), 2015: 1591-1596. [17]Zhu Li, Jiang S Z, Jiang J Z, et al. A new simplex wave winding permanent-magnet brushless DC machine[J]. IEEE Transactions on Magnetics, 2011, 47(1): 252-259. [18]Zhu Li, Jiang S Z, Jiang J Z, et al. Speed range extension for simplex wave winding permanent-magnet brushless DC machine[J]. IEEE Transactions on Magnetics, 2013, 49(2): 890-897. [19]陳益廣. 分數槽集中繞組永磁同步電機的電感計算[J]. 電工技術學報, 2014, 29(3): 119-124. Cheng Yiguang. Inductance calculation of permanent magnet synchronous machines with fractional-slot concentrated winding[J]. Transactions of China Electrotechnical Society, 2014, 29(3): 119-124. (編輯 于玲玲) Analytical Model of Load Commutation of the Circular Winding Brushless DC Machine LinHuangdaWangDongChengSiweiJiaZhewu (National Key Laboratory of Science and Technology on Vessel Integrated Power System Naval University of Engineering Wuhan 430033 China) A circular winding brushless DC (CWBLDC) machine is a multiphase brushless dc machine with the associated commutation circuit. It can achieve higher torque density than permanent magnet synchronous machines (PMSMs) since the iron core is more fully utilized with trapezoidal flux density in air-gap. Based on the proper pole/slot number, it can effectively reduce commutation torque ripple. The commutation circuit should be properly controlled which is the key of the machine. This paper presents a load commutation method for CWBLDC machine, which relies on the EMF of its load (the motor) to reverse the phase current direction. Power devices of the commutation circuit can be turned off with no current flowing through, which can be considered as a form of soft switching. The analytical method of the machine which considers commutation process is derived and critical conditions for successful commutations are highlighted. Field-circuit coupled analysis and experiment results have been performed to verify the load commutation method. Brushless DC machine, circular winding, load commutation, analytical method 國家自然科學基金項目資助(51507181, 51137005, 51222705, 51207163)。 2016-01-27 改稿日期 2016-06-17 TM351 林黃達 男,1986年生,博士研究生,研究方向為電力推進。 E-mail:linhuangda_2015@163.com(通信作者) 王 東 男,1978年生,教授,博士生導師,研究方向為電力推進、獨立電源系統等。 E-mail:wangdongl@vip.sina.com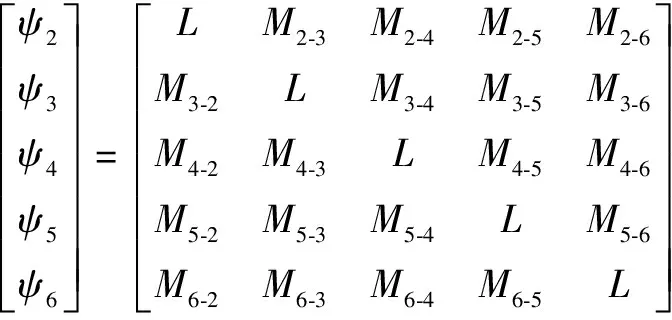
4 換向提前角的確定

5 場路耦合仿真
6 負載換向原理的試驗驗證
7 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19