新型海帶夾苗機械系統的設計及仿真分析
2017-05-18 02:32:25張慶力侯賀啟史強劉
漁業現代化 2017年2期
張慶力侯賀啟史 強劉 輝
(中國海洋大學工程學院山東青島266100)
新型海帶夾苗機械系統的設計及仿真分析
張慶力,侯賀啟,史 強,劉 輝
(中國海洋大學工程學院山東青島266100)
針對海帶夾苗作業過程中勞動強度大、工作效率低等問題,設計一種新型海帶夾苗機,以期實現苗繩破扣、后插送苗夾苗及苗繩復位等過程的自動化。介紹了新型海帶夾苗機械結構組成、夾苗工藝及工作原理;設計了后插執行機構;利用仿真軟件對海帶夾苗機械裝置進行操作過程的運動仿真分析。結果表明:苗繩破扣進給長度為60~80 mm較為理想;繩夾夾取苗繩扭矩應小于4.2 N·m;當破扣時,扭轉角對破扣繩徑的影響是轉角越大則繩徑越大;采用后插方式夾苗,可提高插苗成功率、降低傷苗率。新型海帶夾苗機械系統設計可為海產植物種植裝置的開發應用提供參考。
海帶夾苗機;機械系統;破扣;后插機構;仿真分析
根據聯合國糧食及農業組織(FAO)統計,2002年我國貢獻了全球海帶產量的 89%[3-4];2014年,全國年產海帶80多萬t,產值60多億元。國內外十分重視海帶養殖加工技術研究,日本、美國、英國、加拿大等漁業發達國家處于較高水平[6-8],而我國是世界上唯一在海帶育苗、育種、種質保存和栽培技術等方面都具有完整技術體系的國家[5]。隨著海帶種植集中化、高產化的蓬勃發展,海帶種植業已步入從育苗、夾苗、放養到采收的大規模化生產階段,根據海帶生長特性而研究設計了海帶養殖系統[9-10]。
海帶夾苗是海帶種植業的關鍵工序,夾苗時首先由人工將繩索反向擰松,使繩股出現間隙,將海帶苗根部插入,然后再松手使繩股復位,完成一個周期的夾苗動作。由于人工海帶夾苗的效率低、勞動強度大,因此,海帶夾苗自動化研究受到重視。如:馬祖達等[11]試制出繩夾式、縫紉式、分繩機頭式等3種海帶夾苗機樣機,但分別存在著進苗率較低、帶苗會損傷或夾松、夾苗效果較差等問題;徐學淵[12]設計的海帶苗鉗工作效率高,但夾苗效果不佳;王家連[13]的立式海帶夾苗機、朱金和[14]的自動海帶夾苗機、王元孝[15]的電動海帶夾苗機都優化了海帶夾苗機的結構;張慶力等[16]研究了機械控制的海帶夾苗機的實現形式,但最終未能實現海帶夾苗過程的自動化。
為了解決自動海帶夾苗過程中存在的諸如夾苗鉗夾持海帶苗準確性差、易傷苗,插苗后,苗容易隨著夾苗鉗退出而脫落,以及自動破扣繩股間隙位置和形狀不確定等問題,本文提出了一種新型海帶夾苗機的機械系統設計方案。
1 苗繩物理特性及海帶夾苗機工作原理分析
海帶夾苗工藝流程如圖1所示。將苗繩破扣之后,把海帶苗的根部插入繩股之間的間隙,再將苗繩復位,完成一個周期的夾苗動作。
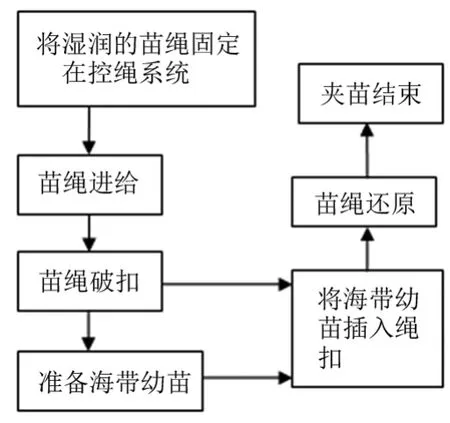
圖1 海帶夾苗工藝流程Fig.1 Flow chart of kelp seedling clamping
1.1 苗繩特性分析
1.1.1 海帶苗繩幾何特性苗繩如圖2所示。

圖2 苗繩Fig.2 Seedling rope
苗繩是海帶生長的根基,長年浸泡在水中,具有防腐、線應變系數不大的特點。1根苗繩由3股細尼龍繩束旋擰成,繩束直徑6 mm,便于夾苗;苗繩長度一般為2 800 mm,繩徑16 mm,苗繩螺距20 mm左右,苗繩一般5年更換1次。
1.1.2 海帶苗繩物理特性
苗繩的特性是指:不同苗繩破扣長度對股繩間隙位置和大小的關系;苗繩破扣長度上,3根股繩之間的擰緊力;反螺旋的旋轉角度對股繩間隙的關系。股繩間的擰緊力影響苗繩破扣時的反螺旋方向力矩和苗繩復位的力矩,旋轉角影響股繩間隙的大小。通過實驗對苗繩特性進行分析。由于股繩間隙形狀的不確定性,研究苗繩破扣進給長度對股繩間隙的影響,采用不同進給長度的苗繩進行試驗,破口旋轉角度為180度(圖3)。

圖3 機械破扣的苗繩Fig.3 Rope of mechanical buckle breaking
試驗結果:苗繩的進給長度為30~40 mm時,旋轉破扣會使苗繩扭折(圖3a);60~80 mm的繩長在扭轉力的作用下,繩扣破開縫隙比較理想(圖3b);90~110 mm的繩長破扣的效果會稍微減弱,會出現時而破扣時而不能完成破扣的現象(圖3c);當進給苗繩太長如120~140 mm不能實現破扣(圖3d)。分析可知,苗繩進給的長短對苗繩的破扣是有影響的,進給苗繩太短,繩在扭轉力作用下容易打滑或者扭折,太長就會失去破扣功能,苗繩破扣進給比較合適的長度為60~80 mm,此時破扣效果利于海帶苗根部的夾取和固定。
試驗中測量工具使用的是電子測力矩扳手。當夾苗裝置夾好苗繩,使用測力矩扳手測繩夾扭開繩扣一個螺距的力矩(圖4),結果顯示,扭開一個繩扣的力矩一般小于4.2 N·m。
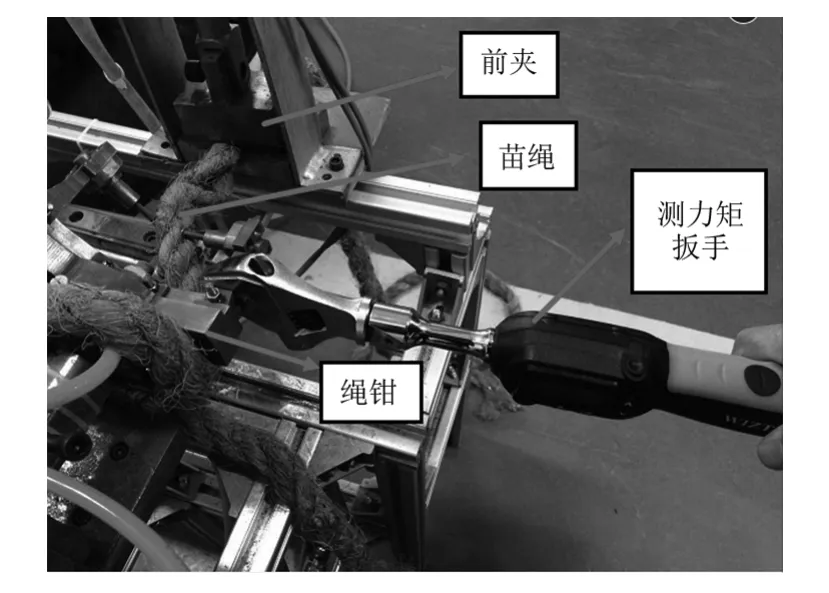
圖4 力矩測試圖Fig.4 Torque test chart
圖5 為在給定進給長度下,研究旋轉角度與股繩間隙大小關系的實驗數據。實驗表明,旋轉角度越大,苗繩破扣后股繩的間隙越大。苗繩破扣的初期變化不大,旋轉170°后,破口變得明顯,最大間隙達到12 mm左右即可滿足夾苗要求。
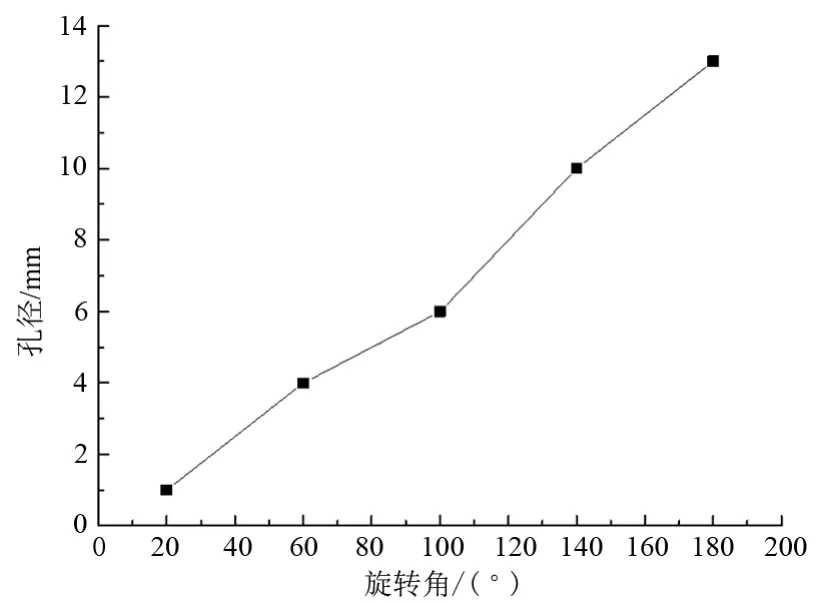
圖5 旋轉角度與苗繩孔徑的關系圖Fig.5 Relationship curve between round angle and the diameter of seedling rope
以上對研究苗繩物理特性的分析為插苗機械系統的設計提供了基礎。人工夾苗方式采用簡單的器具,手工將海帶幼苗夾到苗繩上,插苗時利用人的適應性,將苗的根部插入不確定的股繩間隙中。采用海帶夾苗機插苗,只有解決了苗的根部與股繩間隙的適應性,才能成功完成海帶的夾苗動作。
1.2 苗繩破扣動作的原理
如圖6所示,苗繩一端固定夾緊,另一端夾緊后施加反螺旋方向的力,苗繩在扭轉力作用下,繩股之間產生間隙。
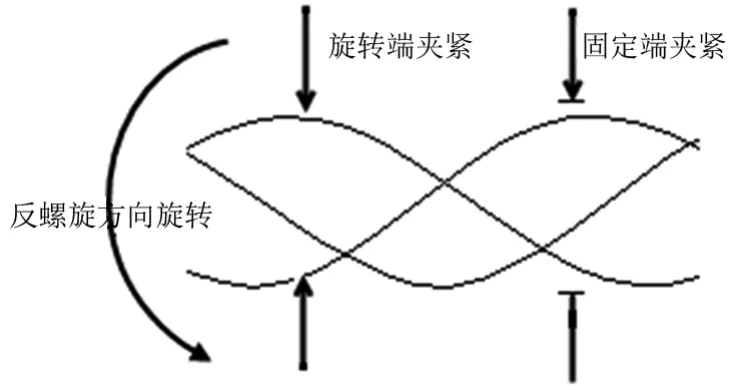
圖6 苗繩破扣原理圖Fig.6 Schematic diagram of seedling and rope buckle breaking
采用三爪繩夾完成旋轉端夾緊和反螺旋方向旋轉的動作,直線運動帶動繩夾的張開閉合,旋轉運動實現苗繩的破扣(圖7),圖中A點為苗繩旋轉端夾緊的位置。
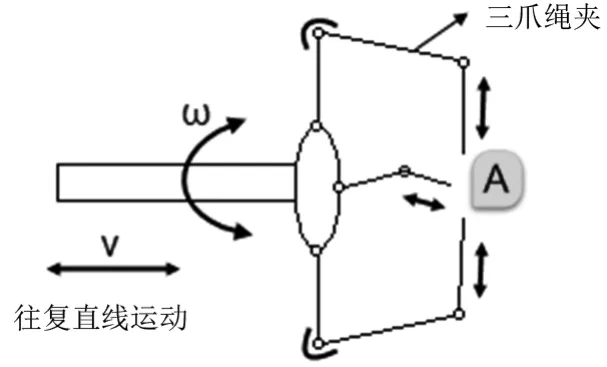
圖7 旋轉端夾緊原理圖Fig.7 Schematic diagram of round end clamping
1.3 插苗動作的原理分析
夾苗鉗首先穿過已破扣的繩口到3號工位夾苗,隨后退出繩口,在2號工位的位置松開幼苗,苗繩復位時,夾苗鉗再次回到1號工位,完成插苗動作(圖8)。

圖8 插苗動作原理示意圖Fig.8 Schematic diagram of transplanting operation principle
2 新型海帶夾苗機械系統設計
2.1 苗繩自動破扣復位裝置
苗繩自動破扣裝置要按圖6所示的苗繩破扣,同時要實現苗繩的進給,為下一個破扣做好準備。其動作流程為:苗繩進給→固定端夾緊→旋轉段夾緊→旋轉端旋轉→旋轉端復位→固定端松開,完成一個破扣復位周期,再從第一步開始下一個周期的動作。
采用連桿組、直線運動裝置和直線導軌等部件設計新型海帶夾苗機的破扣插苗裝置。其工作原理為:伸縮氣缸向前運動到指定位置,旋轉端夾緊部件夾緊,前夾緊鉗松開,伸縮缸向后運動到指定位置,固定端夾緊部件夾緊,完成進繩運動;之后進入破扣環節,旋轉缸旋轉,實現破扣;完成插苗動作后,旋轉缸反轉實現苗繩復位,完成海帶苗的夾苗工作(圖9)。
旋轉端夾緊部件既要夾持住苗繩,又要和夾持部分一同旋轉,繩鉗機構滿足開合運動的自由度,符合機構學運動原理。根據上述機構原理,設計了通過直線運動帶動夾苗機構開合運動的海帶夾苗裝置(圖10),完善了夾苗、持苗、插苗的多運動銜接過程。整個系統簡潔實用,裝置工作快捷、高效。
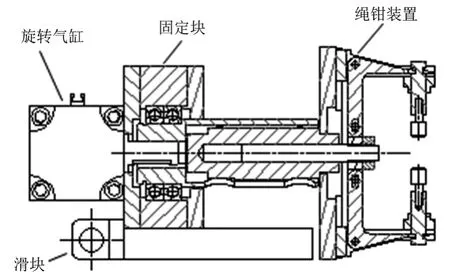
圖10 夾繩破扣裝置Fig.10 Device diagram of buckle breaking of clamping rope
2.2 后插方式分析與結構設計
海帶夾苗是將海帶幼苗的1/2根部夾到破扣后的股繩間隙中,夾苗裝置是實現海帶夾苗的關鍵。
為解決夾苗鉗抽出時海帶苗脫落的問題,采用了后插方式插苗。其工作原理如圖11所示:將夾苗鉗向前穿過已破扣的股繩間隙(實線位置)進行夾苗,再退回股繩間隙后側(虛線位置),最后松開夾苗鉗,完成插苗動作。
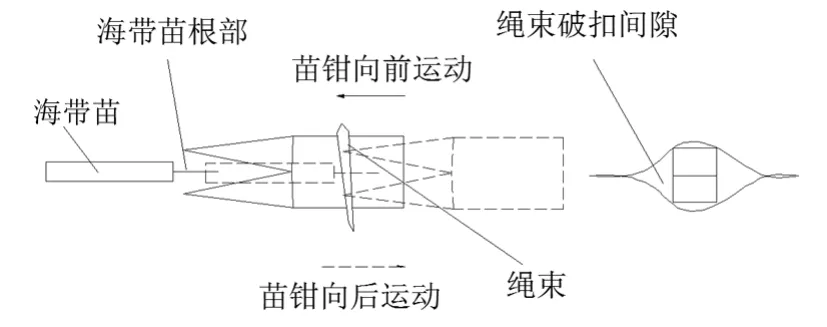
圖11 后插方式原理圖Fig.11 Schematic diagram of post-transplanting mode
后插入苗的方式是海帶夾苗機的新形式,其機構工作過程是:伸縮缸帶動緊閉的夾苗鉗向前運動,穿過已破扣的股繩間隙,鉗口張開,繼續向前運動將海帶苗送入鉗口之中,鉗口閉合,夾苗鉗向后運動,將海帶苗拽入破扣后的股繩間隙中,完成海帶苗的插苗(圖12)。

圖12 插苗機械結構系統圖Fig.12 The mechanical system of seedling transplanting machine
3 新型海帶夾苗機械系統的分析與優化
3.1 繩鉗運動仿真分析
檢測夾繩的質量和工作效率能否達到使用要求,對設計部件進行運動仿真分析。分析繩鉗張開、閉合扭轉,確保苗繩破扣的效果,為下一步的夾苗提供保障。對插苗機械系統進行動力學仿真處理,采用往復運動方式,由往復運動一個周期的位移和時間關系的曲線(圖13)可知:直線運動行程為10 mm,一個周期時間是2 s,繩鉗的開合運動為變速運動,由于結構連接多為轉動副,結構運動受到阻尼等影響。繩鉗閉合一個周期中,由速度與時間關系的曲線(圖14)分析可知,平均速度0.021 m/s,最大加速度0.042 m/s2,該速度可以滿足夾苗的需要。
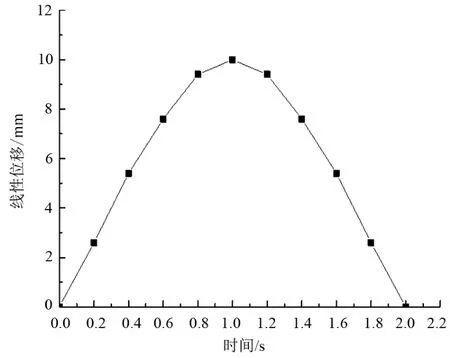
圖13 伸縮缸位移與時間的曲線圖Fig.13 Curve of displacement of telescopic cylinder and time
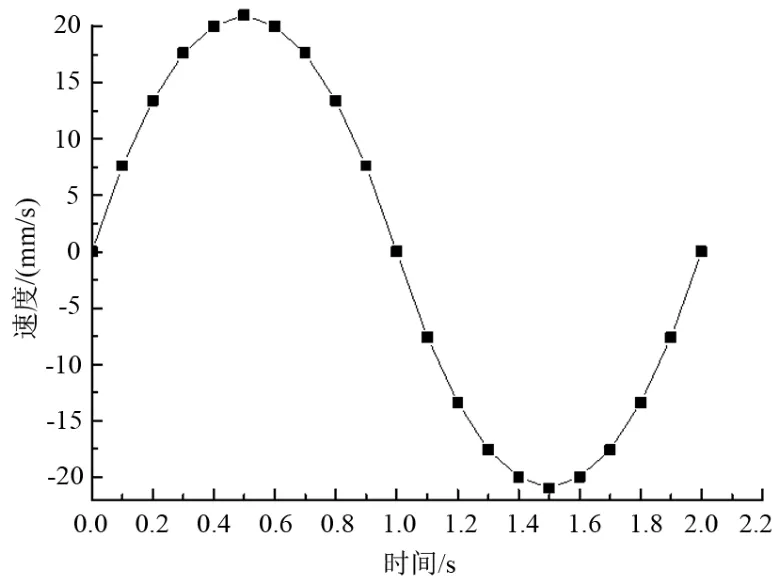
圖14 繩鉗端點速度與時間的曲線圖Fig.14 Curve of endpoint speed of the rope clamp and time
氣缸往復直線運動帶動夾苗鉗的開合運動,對繩鉗進行運動仿真分析。繩鉗開合的角速度變化如圖 15所示,最大角速度為 17°/s。分析圖16、圖17可知,繩鉗的初始角度為2°,繩鉗在1 s時間內的最大張開角度為 14°,最大距離56 mm,苗繩本身直徑16 mm,繩鉗為剛性件不需完全閉合,為此會留有2°的初始角度,作為海帶夾苗機上的插苗裝置,56 mm完全滿足要求。
通過繩鉗運動仿真分析,修改不合理的結構,使繩鉗的運動和夾苗運動相適合,夾苗鉗速度0.021 m/s可以滿足工作;通過仿真分析,優化繩鉗等運動部件,確保繩鉗在張開距離內能夠抓住苗繩。分析結果顯示,繩鉗張開距離為56 mm,滿足海帶苗的后插設計要求。該機械運動系統代替人工插苗,提高工作效率,為解決海帶插苗中的瓶頸問題及后續研究提供參考。

圖15 繩鉗端點角速度與時間的曲線圖Fig.15 Curve of endpoint angular velocity of the rope clamp and time
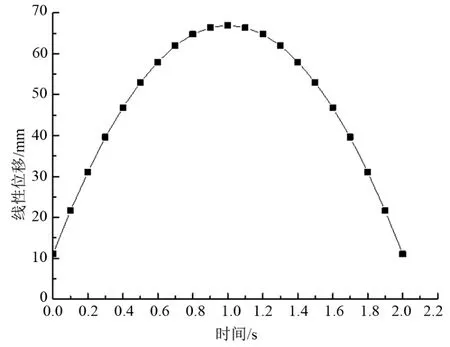
圖16 繩鉗端點位移與時間的曲線圖Fig.16 Curve of the endpoint displacement of the rope clamp and time
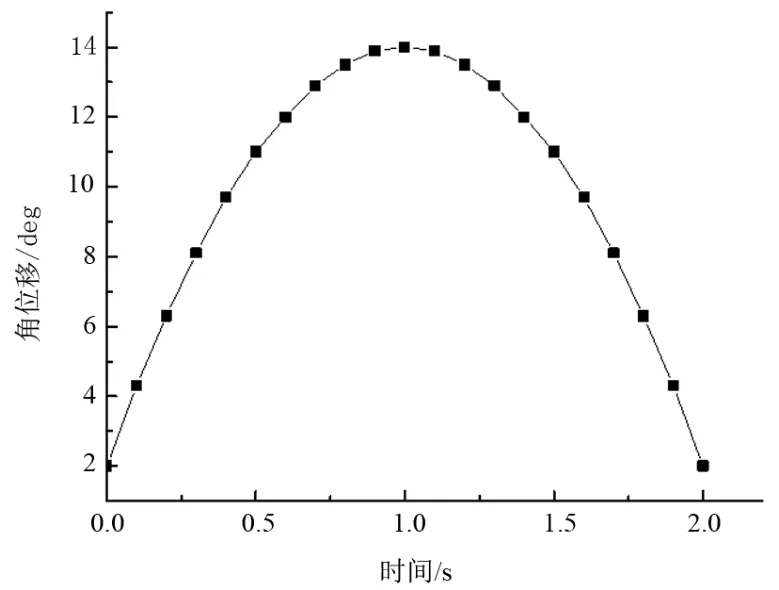
圖17 繩鉗的角位移與時間的曲線圖Fig.17 Curve of the angular displacement of rope clamp and time
4 結論
采用后插方式將海帶幼苗插入苗繩中,可以實現海帶夾苗機的自動插苗,降低傷苗率;自動控制的應用將機電一體化技術應用到海帶夾苗機中,實現海帶夾苗的連續自動化。機械系統試驗及仿真分析結果表明,苗繩破扣進給的理想苗繩長度為60~80 mm,此長度破扣效果利于海帶苗根部的夾取和固定;繩夾夾取苗繩扭轉的力矩應小于4.2 N·m;破扣時,扭轉角度對破扣的繩徑有影響,旋轉角度越大則繩徑越大。新型海帶夾苗機械系統設計可為海產植物種植裝置的技術研究提供參考。 □
[1] CéSAR P,NOEMí S,BREZO M.Mariculture of the Asian kelpUndaria pinnatida and the native kelpSaccharina latissimaalong the Atlantic coast of Southern Europe:An overview[J].Algal Research,2016,15(8):9-23.
[2] 滕瑜,劉從力,張雙靈,等.海帶加工產業化的可持續性發展概述[J].保鮮與加工,2012,12(3):47-50.
[3] 金振光,劉巖,張靜,等.中國海帶養殖現狀與發展趨勢[J].海洋湖沼通報,2009,10(1):141-150.
[4] 岳昊,孫英澤,胡婧,等.中國海帶產業及國際貿易情況分析[J].農業展望,2013,9(9):65-69.
[5] 張壯志,從義周,李曉捷,等.我國海帶育種研究歷史、現狀及建議[J].齊魯漁業,2011,28(1):42-43.
[6] 王承祿,蘆樹長,湯庭耀.威海市海帶養殖加工綜述[J].現代漁業信息,1997(11):1-5.
[7] GAO X,ENDO H,TANIGUCHI K.Effects of experimental thinning on the growth and maturation of the brown algaUndaria pinnatida(Laminariales;Phaeophyta)cultivated in Matsushima Bay,Northern Japan[J].Journal of Applied Phycology,2014,26(1):529–535.
[8] 程艷,陳麗嬌,肖欣欣,等.國內外海帶加工現狀與福建省的發展對策[J].福建水產,2011,33(2):89-92.
[9] GERARD V A.Ecotypic differentiation in the kelp Laminaria saccharina:Phase-specific adaptation in a complex life cycle[J].Marine Biology,1990,107(3):519-528.
[10]BUCK B H,BUCHHOLZ C M.The offshore-ring:a new system design for the open ocean aquaculture of macroalgae[J].Journal of Applied Phycology,2004,16(5):355-368.
[11]馬祖達.海帶夾苗機的研究[J].漁業現代化,1980(3):15-16.
[12]徐學淵.海帶夾苗鉗的設計與應用[J].浙江水產學院學報,1991,10(2):106-109.
[13]王家連.立式海帶夾苗機:CN101032218[P].2007-9-12.
[14]朱金和.自動海帶夾苗機:CN201894102U[P].2011-7-13.
[15]王元孝.一種電動海帶夾苗機:CN102715073A[P].2012-10-10.
[16]張慶力,張寶成,高寶財,等.基于運動仿真海帶夾苗機機械控制系統的研究 廣西大學學報(自然科學版)2015(S2):458-461.
Design and simulation analysis of a new type of kelp seedling clamping mechanical system
ZHANG Qingli,HOU Heqi,SHI Qiang,LIU Hui
(College of Engineering,Ocean University of China,Qingdao 266100,China)
In order to solve the problems of great labor intensity,low working efficiency,etc.in the process of kelp seedling clamping operation,a new type of kelp seedling clamping machine was designed,with the aims to automation of the process of seedling and rope buckle breaking,clamping of post-transplanting seedling and restoration of seedling and rope,etc..This paper introduces the mechanical structure,the technics and working principle of the machine.And post-insertation executive structure was also designed.The kinematical simulation analysis of operation process was performed by applying the stimulation software.The results showed that the ideal feeding length of seedling and rope buckle breaking was 60-80 mm;torque of rope clip and seedling clamping rope should be less than 4.2 N·m;when the buckle was broken,the larger the torsion angle is,the larger diameter of the rope is;adopting the clamping of post-transplanting seedlings could increase the survival rate of post-insertion seedlings and reduce the rate of damage to the seedlings.The design of a new type of mechanical system of kelp seedling clamping can provide references for the development and application of the planting device of marine plants.
kelp seedling clamping machine;mechanical system;buckle breaking;post-transplantation;simulation analysis
S969.37
A
1007-9580(2017)02-014-06
10.3969/j.issn.1007?9580.2017.02.003
2017-01-03
中國海洋大學工程學院青年教師資助項目“海帶夾苗機的研制”
張慶力(1970—),男,高級工程師,碩士生導師,研究方向:海洋機電裝備。E-mail:zql6129@126.com
