一種簡化的線結構光視覺傳感器現場標定方法
2017-05-23 18:29:13陳麗梁曉琳楊亞磊王國斌
中小企業管理與科技·上旬刊 2017年5期
陳麗+梁曉琳+楊亞磊+王國斌

【摘 要】用線結構光視覺傳感器進行物體輪廓測量在非接觸測量中變得越來越重要。其中,線結構光視覺傳感器的標定是線結構光視覺測量的關鍵。論文根據現有的標定方法,提出了一種基于方框形圓點靶標的標定方法,并給出了數學模型。經過實驗其精度滿足普通測量要求。
【Abstract】 The contour measurement by using the light visual sensor in line structure is becoming more and more important in non-contact measurement. The calibration of line structure optical vision sensor is the key of line structure optical visual measurement. Based on the existing calibration method, this paper presents a calibration method based on the block shaped dot target, and gives a mathematical model. The accuracy of the experiment is met with ordinary measurement.
【關鍵詞】線結構光;視覺傳感器 ;現場標定方法
【Keywords】 line structured light; vision sensor; field calibration method
【中圖分類號】TP391.41 【文獻標志碼】A 【文章編號】1673-1069(2017)05-0163-02
1 研究現狀
目前,針對線結構光的視覺測量模型,提出了許多線結構光傳感器的標定方法。主要有Dewar R提出的拉絲標定法[1],段發階等提出了鋸齒靶法[2-3],Huynh、徐光祐和魏振忠分別提出了利用交比不變性原理獲取光平面標定點的標定方法。周富強、張廣軍等人提出了基于平面參照物的標定方法,簡化了標定設備,適合現場標定,但每次標定時需多次改變激光光條與平面標定參照物的位置,增加了標定的復雜度。后來,周富強和魏振忠等先后提出了利用一維靶標上距離已知的特征點之間的距離約束,實現線結構光視覺傳感器的結構參數標定的新方法,但標定點獲取的個數和精度受到限制。
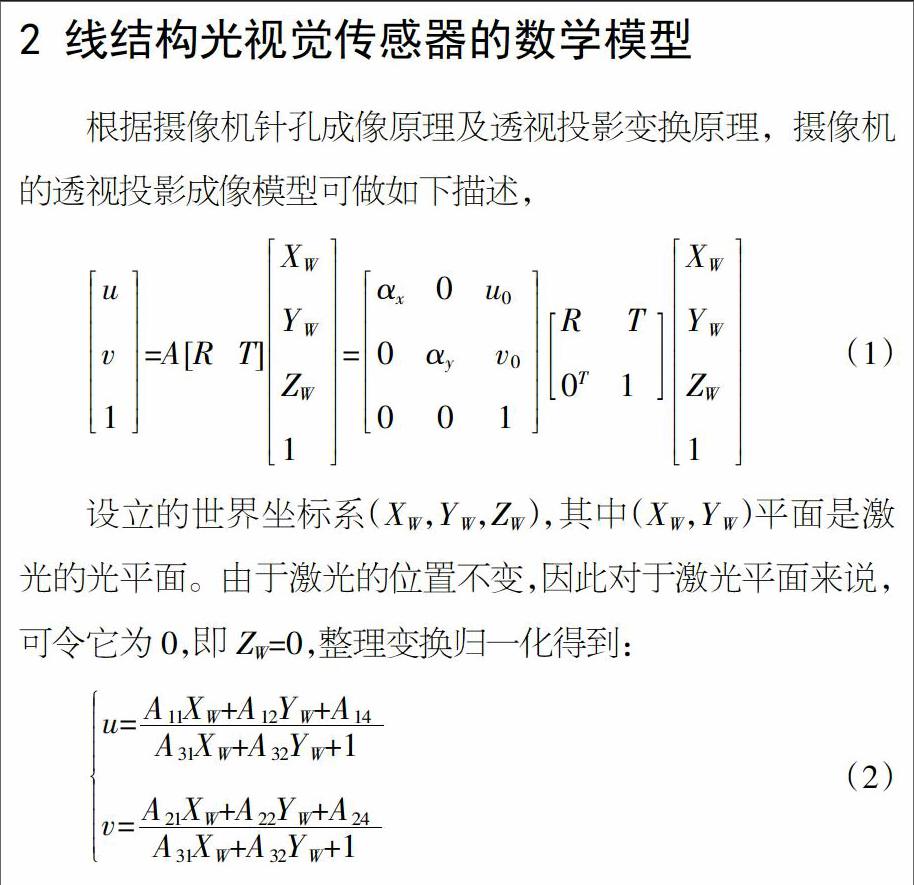
2 線結構光視覺傳感器的數學模型
3 線結構光視覺傳感器的標定
3.1 標定靶標的設計
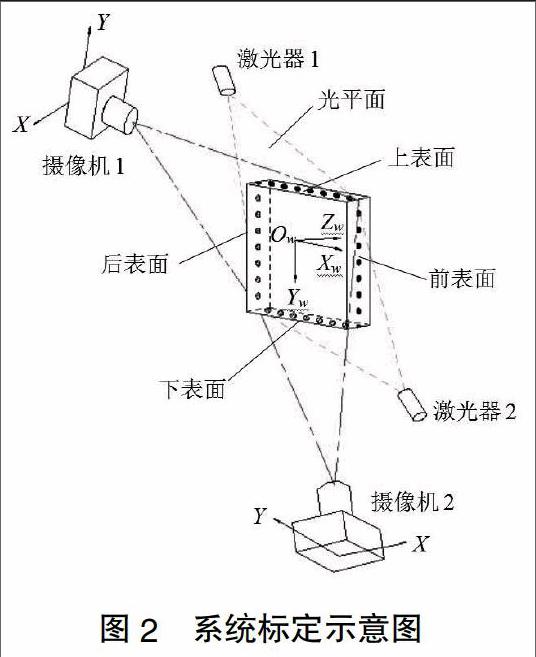
根據線結構光視覺傳感器的數學模型可知有8個未知系統參數,需要至少4個非共線對應點。由此,設計了方框型圓點靶標,用來獲取標定時所需要的高精度的標定點。該靶標由相互垂直的四個剛性平面構成,四周光刻半徑為4mm,相鄰間距為20mm的標靶圓點,分別以中間靶標圓點的中心為定位點定位在靶標框的直角頂點處。調整靶標使激光光平面與靶標圓點中心所在平面一致,如圖1所示。
3.2 系統參數的標定
按照圖2所示系統結構安裝調整攝像機1和攝像機2使靶標圓點能在其中成全像,并且由線結構光視覺傳感器的數學模型可知,靶標圓點的圖像坐標也不能在同一直線上。
4 試驗
標定精度主要從單點的定位精度進行驗證。用標定好的兩臺攝像機采集驗證點的圖像,并根據如圖3所示,其中,實際坐標用“O”表示,測量坐標用“+”點表示,其對比誤差在0.2mm以內。
5 結論
建立了基于線結構光視覺傳感器測量輪廓截面積的數學模型,提出了一種基于方框形共線圓點靶標的線結構光傳感器系統參數的現場標定方法。該方法只需要調整標定靶標使其特征圓點的中心平面與線結構光平面在同一平面內,即可通過一次靶標圖像采集,計算出線結構光視覺傳感器的系統參數。目前,關于如何調整光平面使其與基準平面在同一平面內還沒有簡便有效的方法,可進一步研究來提高精度。
【參考文獻】
【1】段發階.一種新型線結構光傳感器結構參數標定方法[J].儀器儀表學報,2000,21(l):105-110.
【2】魏振忠,張廣軍,徐園. 一種線結構光視覺傳感器標定方法[J]. 機械工程學報,2005(02):210-214.
【3】周富強,張廣軍,江潔. 線結構光視覺傳感器的現場標定方法[J]. 機械工程學報,2004(06):169-173.
