基于異方差偽線性模型的純方位目標要素估計
2017-05-25 00:37:37趙建昕笪良龍
探測與控制學報 2017年2期
關鍵詞:模型
趙建昕,笪良龍
(海軍潛艇學院,山東 青島266071)
基于異方差偽線性模型的純方位目標要素估計
趙建昕,笪良龍
(海軍潛艇學院,山東 青島266071)
針對偽線性跟蹤估計器假定誤差項之間不相關且方差相等,導致利用最小二乘方法得到的目標要素的估計不是最優(yōu)無偏估計的問題,提出了基于異方差偽線性模型的加權目標運動要素估計方法。該方法考慮了經典的偽線性模型誤差項中隨時間變化的異方差部分,首先通過方位信息估計出瞬時距離與初始距離比,得到偽線性模型誤差項中的異方差部分的估計,然后利用加權最小二乘方法,得到了理論上目標要素的最優(yōu)無偏估計。數值仿真和實驗數據驗證表明,該方法優(yōu)于經典純方位偽線性化方法。
信息處理技術;目標運動分析;加權最小二乘估計;純方位
0 引言
純方位目標要素解算是目標定位和跟蹤的重要研究內容,由于方位觀測數據的非線性,導致了該問題的復雜性。降低問題的復雜性以及便于工程上實現,將方位的觀測模型偽線性化是一類重要的方法,其本質是選擇一個新的偽觀測量,將非線性觀測模型轉化為一個偽線性模型,利用最小二乘方法對目標要素進行估計,如文獻[1—6],分別從系統(tǒng)的可觀測性、目標要素的最優(yōu)估計以及觀測站的最優(yōu)機動策略等作了研究,其解決問題的一個基本假定是模型的誤差項之間不相關且方差相等,這是對偽線性模型誤差項的近似處理,與觀測方程作線性化處理時所獲得的新的觀測誤差的非高斯性是不一致的,結果導致了利用最小二乘方法得到的目標要素估計的有偏性和非最優(yōu)性[7],目標要素的估計收斂時間長,甚至結果發(fā)散,本文針對此問題,提出了基于異方差偽線性模型的純方位目標要素估計方法。
1 經典偽線性模型及目標要素估計
以下總假定目標作勻速直線運動,只考慮在其運動平面的兩維情形。
為研究方便,引入表1記號。
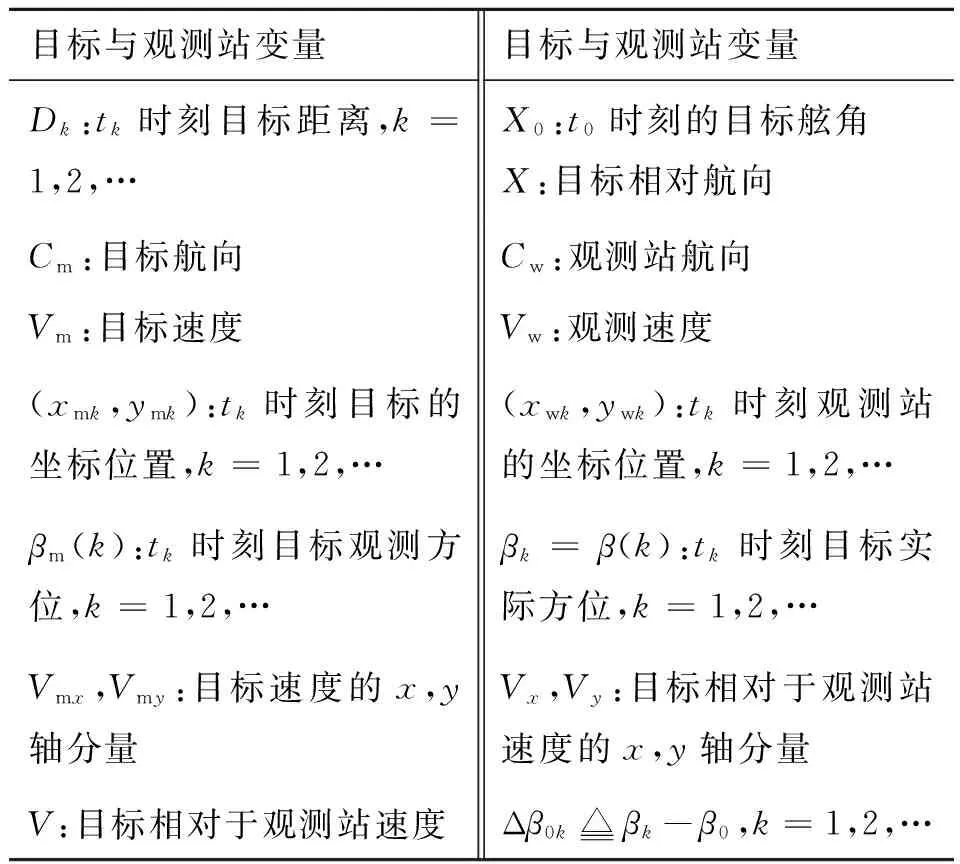
表1 變量符號說明
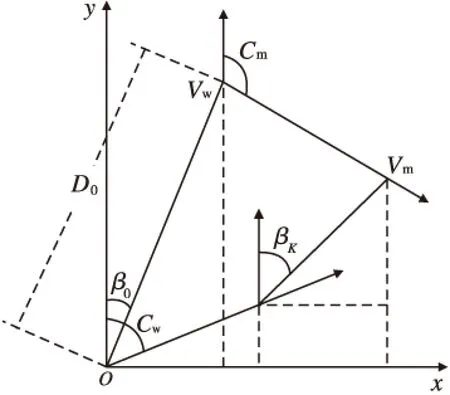
圖1 觀測站和目標的運動態(tài)勢Fig.1 Scenario between observer and target

圖2 觀測站和目標的相對運動態(tài)勢Fig.2 Relative scenario between observer and target
由圖1、圖2知,目標方位與D0,Vmx,Vmy的關系為:
(1)


(2)
記βmk=βm(k),e(k)=-Dksinν(k),zk=ywksinβmk-xwkcosβmk,k=0,1,2,…,注意到xm0=D0sinβm0,ym0=D0cosβm0,xmk=xm0+Vmx(tk-t0),ymk=ym0+Vmy(tk-t0),則式(2)轉化為
zk=sin(βmk-βm0)·D0+(tk-t0)sinβmk·Vmy-
(tk-t0)cosβmk·Vmx+e(k)
(3)
經典的純方位方法就是以上述模型為基礎,并假設e(k)是不相關的同方差的隨機誤差,利用最小二乘法估計參數D0,Vmy和Vmx,如文獻[1-6],這會導致目標參數估計的有偏性問題[7,9]。顯然該模型的誤差假設與實際情況是不相符的。
2 異方差偽線性模型及目標要素估計

zk=sin(βmk-βm0)·D0+(tk-t0)sinβmk·Vmy-
(tk-t0)cosβmk·Vmx+Dkν(k)
(4)
式(4)兩邊同時除D0,整理得
(5)
此時,模型(5)關于參數θ的加權最小二乘估計滿足下列方程組:
(6)

綜上分析,兩個偽線性模型的不同主要表現在:一是異方差偽線性模型考慮了不同時刻的觀測誤差的不同;二是目標要素的估計方面,異方差偽線性模型中的參數估計利用了加權最小二乘方法,理論上得到了目標要素的最優(yōu)無偏估計,克服了經典方法目標要素估計的有偏性;三是從數值模擬和實驗驗證兩個方面的結果看,新方法的目標要素估計收斂時間要少于經典方法的目標要素估計收斂時間。
3 目標要素估計及算法實現
3.1 目標相對航向角的估計
當目標和觀測站均作勻速直線運動時,利用相對運動規(guī)律知,目標可看作為勻速直線運動的物體,假設等時間間隔采樣,于是由文獻[12]知,假設β1,β2,β3是三個不同的方位角,則目標相對航向角X滿足:
(7)
實際計算中,考慮到測量方位的誤差,可采用多次計算的平均作為目標相對航向角的估計值。
3.2 瞬時距離與初始距離比的估計
(8)

這里需要注意,式(8)得到的距離比估計是在目標和觀測站均作勻速直線運動的條件下成立的,對于該方法得到的估計性能的仿真,詳見4.1節(jié)。
3.3 算法
假設目標作勻速直線運動,考慮到式(6)的矩陣ATV-1A的可逆性,這里觀測站做一次航向機動,速度大小不變,其參數的估計算法為:
1)利用式(7),估計目標相對航向角;
2)利用式(8),估計距離比;
3)利用式(6),估計目標初始距離、速度和航向;
4)觀測站機動,此時目標距離記為Dk0,重新利用步驟1)和2),得到瞬時距離與Dk0的比;
5)利用步驟2)和4)得到的距離比相乘,得到第二階段瞬時距離與初始距離的比;
6)重復步驟3)。
4 數值仿真與實驗驗證
下面通過數值模擬和實驗數據驗證,檢驗本文方法的有效性和可行性。
4.1 數值仿真
首先假設觀測站不做航向和速度機動,考察式(8)的瞬時距離與初始距離比估計量的性能。考慮兩類態(tài)勢:一類是目標接近;二類是目標遠離。
以時間總長600 s為例,抽樣時間2 s,利用仿真的前50 s方位數據,對目標相對航向角進行估計,進而利用此估計值對距離比進行估計和預測,目標和觀測器其他的參數設定見表2。
圖3對應的實驗序號1,給出了目標接近態(tài)勢,觀測站速度分別為3×1 852/3 600 m/s和6×1 852/3 600 m/s,不同的方位誤差的模擬結果。
圖4對應的實驗序號2,給出了目標遠離態(tài)勢,觀測站速度分別為3×1 852/3 600 m/s和6×1 852/3 600 m/s時,不同的方位誤差的模擬結果。
從表2的仿真結果看,利用前50 s的方位數據可以比較準確地估計距離比參數,誤差均控制在2%以內,方位誤差越小,估計誤差越小。

表2 觀測站和目標數值模擬要素值

圖3 目標接近態(tài)勢Fig.3 Approaching scenario of target

圖4 目標遠離態(tài)勢Fig.4 Removing scenario of target
其次,考察觀測站做航向機動,在兩類態(tài)勢下,利用加權算法對目標距離、速度和航向的估計。圖5給出了目標初始距離15×1 852m,目標速度20×1 852/3 600m/s,目標航向120°,觀測站速度6×1 852/3 600m/s,航向由30°轉至50°的遠離態(tài)勢目標要素估計結果。圖6給出了目標初始距離15×1 852m,目標速度20×1 852/3 600m/s,目標航向120°,觀測站速度6×1 852/3 600m/s,航向由0°轉至20°的接近態(tài)勢目標要素估計結果。從圖5和圖6的結果看,如果以參數真值的10%誤差上下限為收斂域,新方法要優(yōu)于經典純方位方法,當方位誤差為0.1°時,利用新方法求得的三個參數估計基本上都能在600s左右收斂到10%誤差上下限內。
4.2 海試數據驗證
為了驗證文中的新方法在實際環(huán)境中的性能,以下是基于某次海上的實驗數據,利用文中給出的方法與經典的偽線性估計算法進行了實證比較。實驗方案具體為:
初始時刻,目標航向為104.76°,目標速度為17.56×1 852/3 600m/s,初始方位為264.10°。觀測站初始時刻的航向為340.10°,速度為6.72×1 852/3 600m/s。目標和觀測站的初始距離為72.86×185.2m,采樣時間為2s,觀測站從240s開始機動,至360s結束,總用時1 150s。目標和觀測站在整個實驗過程中的要素值見圖7,圖8為目標要素的估計結果。從目標要素的估計在真值的上下10%的誤差限內來看,加權純方位算法要優(yōu)于經典純方位算法,特別地,在上下10%誤差限內,加權純方位算法估計的目標速度,其波動要小一些。


圖5 目標遠離態(tài)勢Fig.5 Removing scenario of target


圖6 目標接近態(tài)勢Fig.6 Approaching scenario of target


圖8 目標要素估計Fig.8 Estimates of target elements
5 結論
本文提出了基于異方差偽線性模型的加權目標要素估計方法。該方法考慮了經典的偽線性模型誤差項中隨時間變化的異方差部分,首先通過方位信息估計出瞬時距離與初始距離比,得到偽線性模型誤差項中的異方差部分的估計,然后利用加權最小二乘方法,得到了理論上目標要素的最優(yōu)無偏估計。數值模擬和實驗數據驗證結果表明,該算法與經典的純方位算法相比,給出的目標要素估計的收斂時間要少,方法是有效可行的。隨著方位誤差的增加,目標要素的估計也表現出波動性較大,這是下一步需要深入研究的內容。
[1]孫洪勝.基于方位角測量的無源定位算法研究[D].哈爾濱:哈爾濱工程大學,2010.
[2] 趙驍飛.單站純方位無源探測定位的若干技術的研究[D].上海:上海交通大學,2007.
[3] 許志剛,董志榮.純方位系統(tǒng)單目標定位與跟蹤的擬線性估計器[J].彈道學報,2002,14(3):10-16.
[4] 楊國勝,竇麗華,侯朝楨.基于純角度的三維運動目標可觀測性研究[J].兵工學報,2004,25(2):182-185.
[5] 劉忠,鄧聚龍.多傳感器系統(tǒng)純方位定位與可觀測性分析[J].火力與指揮控制,2004,29(5):79-87.
[6] 趙建昕,笪良龍,徐國軍,等.線性等式約束下的純方位目標運動分析[J].應用聲學,2014,33(2):120-129.
[7] 夏佩倫.目標跟蹤與信息融合[M].北京:國防工業(yè)出版社,2010.
[8]AidalaVJ.Kalmanfilterbehaviorinbearings-onlytrackingapplication[J].IEEETransactionsonAerospaceandElectronicSystems, 1979, 15(1): 29-39.
[9]AidalaVJ,NordoneSC.Biasedestimationpropertiesofthepseudolineartrackingfilter[J].IEEETransactionsonAerospaceandElectronicSystems, 1982, 18(4):432-441.
[10]Aidala.VJ.Behaviorofthekalmanfilterappliedtobearings-onlytargetmotionanalysis[R].Navalunderwatersystemscenter,NUSCtech,USA:1976.
[11] 徐利治.現代數學手冊—隨機數學卷[M].武漢:華中科技大學出版社,2000:252-253.
[12] 劉進忙,姬紅兵,左濤.純方位觀測的航跡不變量目標跟蹤算法[J].西安電子科技大學學報,2008,35(1):49-53.
Target Bearings-only Elements Estimation Based on Heteroscedastic Pseudo-linear Model
ZHAO Jianxin, DA Lianglong
(Navy Submarine Academy, Qingdao 266071, China)
The estimation of target elements using least square method are not optimal unbiased estimates as the pseudo linear target tracking filter based on non-correlation errors of model and equal variance.In order to solve the question, a heteroscedastic pseudo-linear model was established by using new parameter variables, based on the model, a weighted method for target motion analysis was presented. The heteroscedastic part of error of the pseudo-linear model was considered. Firstly, the ratio of instantaneous distance and initial distance were estimated by using bearings and the estimate of the heteroscedastic part of model error was obtained, then, By using the weighted least squared method, the optimal unbiased estimates of target elements were obtained in theory. Numerical simulation results showed that the new method was better than the classical pseudo-linear methodt.
information processing technology;target motion analysis;weighted least square estimate;bearings-only
2016-12-20
總裝預研究項目資助(51303080302-5)
趙建昕(1969— ),男,山東青島人,博士,副教授,研究方向:水聲信號處理。E-mail:qy_zjx@eyou.com。
O428
A
1008-1194(2017)02-0007-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
