基于光電位置傳感的彈道偏航與姿態測量
2017-05-25 00:37:37侯望高陳遵田崔景霖
探測與控制學報 2017年2期
關鍵詞:測量
侯望高,陳遵田,崔景霖
(機電動態控制重點實驗室,陜西 西安 710065)
基于光電位置傳感的彈道偏航與姿態測量
侯望高,陳遵田,崔景霖
(機電動態控制重點實驗室,陜西 西安 710065)
針對傳統激光駕束制導彈道偏航和姿態測量需要高精度的慣性測量組件,存在系統復雜、體積大、成本高的問題,提出基于光電位置傳感的彈道偏航與姿態角測量方法。該方法利用光電位置傳感器PSD代替傳統光電編碼傳感器完成彈道偏差測量,光電位置傳感器還根據激光光斑在光電位置傳感器上的位置代替傳統慣性測量組件判斷偏航角、俯仰角。同時實現彈丸彈道偏航與姿態角測量。測量精度評價分析表明,所提出的測量方法對彈丸偏航角和俯仰角測量精度可達到0.60°,能夠滿足小口徑槍榴彈彈道修正的應用需求。
激光駕束制導;彈道修正;光電位置傳感器;彈丸姿態測量
0 引言
激光駕束制導是通過地面激光照射器發射經過調制的激光束照射到要攻擊的目標,同時發射激光駕束制導彈藥。彈在飛行中通過安裝在彈尾部的光信號接收器接收地面照射器發射的駕束光信號,依據駕束光場中調制信號的頻率判斷彈道的偏差量,結合彈上的慣性測量組件測量彈的姿態信息,為彈上制導組件的控制器提供修正所用的控制信息[1]。
由于激光駕束制導武器打擊精度高,使用方便靈活,是目前精確打擊武器發展的重點方向之一,并有向小口徑彈藥發展的趨勢。
槍榴彈通常作為單兵使用的武器裝備,作戰使用靈活方便,在現代戰爭中仍有廣泛的用途。傳統的槍榴彈為無控彈藥,作戰時由于目標距離一般較遠,在幾百米以外,首發命中的概率低。為了提高槍榴彈的打擊精度,在槍榴彈上采用激光駕束彈道修正技術,對槍榴彈丸彈道進行修正,實現槍榴彈有控化和精確打擊,以提高槍榴彈的作戰效能。
要實現小口徑彈道的有控化和精確打擊,首要的問題是解決彈上測量系統的小型化和低成本問題。機械和光纖慣性測量組件的體積大,無法在槍榴彈上使用。基于微機械的慣性測量組件精度低,價格高,難以滿足槍榴彈的使用要求。針對現有的慣性測量組件無法在小口徑彈上使用的問題,提出基于光電位置傳感[2-5]的彈道偏航與姿態測量方法。
1 傳統激光駕束制導的彈道測量和光電位置傳感器
傳統的激光駕束制導是由光電編碼傳感器和慣性測量組件兩個裝置分別實現彈道偏差測量和彈體姿態測量。
在彈道偏差測量時,由專門的地面激光器發射激光束照射目標,該光束為經調制盤調制和光學系統擴束的引導光束,引導光束在空間的位置不同,光信號的調制頻率也不同,代表與中心位置的偏差量不同。導彈在引導激光光束中飛行,位于彈尾的光電編碼傳感器接收激光信號,依據接收到經調制的光信號頻率計算出彈丸的彈道偏差量[1]。
在彈體姿態測量時,由彈上的慣性測量組件測量出彈體的俯仰和偏航角。滾轉角的測量可通過慣性測量組件實現,也可由地磁傳感器測量。彈道偏差量、俯仰和偏航角及滾轉角在彈上計算機中進行綜合判斷,形成控制指令,控制導彈或炮彈向著目標飛行,直至命中目標。
激光駕束制導姿態測量原理框圖如圖1所示。

圖1 激光駕束制導姿態測量原理框圖Fig.1 Principle block diagram of laser beam riding guidance attitude measurement
光電位置傳感器是一種對入射到光敏面上的光點位置敏感的光電傳感器件,其輸出信號與光點在光敏面上的位置有關。其特點是:1)它對光斑的形狀無嚴格要求,即輸出信號與光的聚焦無關,只與光的能量中心位置有關;2)光敏面上無須分割,消除了死區,可連續測量光斑位置,位置分辨率高;3)可同時檢測位置和光強,PSD器件輸出總光電流與入射光強有關,而各信號電極輸出光電流之和等于總光電流[6]。
PSD的結構包含三層,上面為P層,下面為N層,中間為I層,它們全被制作在同一片硅片上。P層不僅作為光敏層,而且還是一個均勻地電阻層。當入射光照射到PSD的光敏層上時,在入射位置上就產生了與光能成比例的電荷,此電荷作為光電流通過電阻層(P層)由電極輸出。由于P層的電阻是均勻的, 所以各電極的輸出電流分別與光點到各電極的距離(電阻值)成反比[7-8]。
傳統的激光駕束制導利用光電傳感器測量彈道偏差信息,同時利用加速度計和陀螺儀測量彈丸相對于駕束激光的俯仰角和偏航角[9],這是利用兩種組件實現兩種功能造成系統復雜、體積大、成本高,難以在小口徑槍榴彈上使用。另外微慣性測量組合雖然體積小,但存在零漂問題,測量精度低。慣性測量成為制約彈道修正小型化、低成本的瓶頸。
2 基于光電位置傳感器的彈道修正姿態測量方法
針對傳統激光駕束制導彈道測量存在的問題,提出基于光電位置傳感器PSD的彈道偏航與姿態測量方法。保持現有地面激光照射器設計參數不變,采用PSD一種組件同時實現測量彈道偏差信息和彈丸相對于駕束激光的俯仰角和偏航角,在駕束激光坐標系中計算出彈丸偏航和俯仰姿態信息,結合磁傳感器的滾轉角信息,形成基于駕束光坐標系的控制指令,控制執行機構對彈丸彈道進行修正。基于光電位置傳感器的彈道偏差與姿態測量原理框圖如圖2所示。
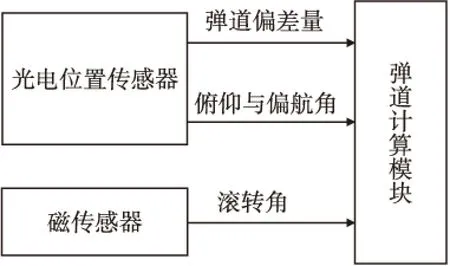
圖2 光電位置傳感器彈道偏差與姿態測量原理框圖Fig.2 Principle block diagram of trajectory deviation and attitude measurement of photoelectric position sensor
光電位置傳感器PSD測量彈道偏差與傳統方法相同。而光電位置傳感器PSD測量彈體姿態是利用PSD測量當前駕束激光經光學系統匯聚在光電位置傳感器上的光斑落點位置,從而確定當前彈體的俯仰和偏航角。激光光斑在PSD上的落點不同則對應著不同的彈體姿態。這就實現了光電位置傳感器PSD一種裝置實現彈道偏差和彈體姿態兩種信息測量。
槍榴彈在激光束中不同的飛行姿態對應著激光光斑落在光電位置傳感器PSD上不同位置。當槍榴彈在駕束激光坐標系中沿激光光束方向飛行,并與激光光束夾角為零,此時彈體姿態處于無偏狀態,激光匯聚光斑正好落在個光電位置傳感器PSD的中間位置,如圖3所示。

圖3 彈體無偏PSD示意圖Fig.3 Schematic diagram of trajectory unbiased PSD
當槍榴彈在駕束激光坐標系中不沿激光光束方向飛行,并與激光光束方向存在一定的夾角,此時彈體處于偏離狀態,激光匯聚光斑落在光電位置傳感器某一位置上,如圖4、圖5位置傳感器的輸出可以反映俯仰角度。同理,位置傳感器也可以同時反映偏航角度。

圖4 彈體上偏PSD示意圖Fig.4 Schematic diagram of trajectory upward shif PSD

圖5 彈體下偏PSD示意圖Fig.5 Schematic diagram of trajectory downward migration PSD
與傳統采用慣性測量組件測量彈的姿態不同的是,傳統慣性測量組件所測量的是彈丸在大地坐標系中的俯仰和偏航角度,而光電位置傳感器測量出的彈俯仰和偏航角是相對于駕束激光坐標系的姿態信息。位置傳感器的輸出與姿態信息的關系如下分析可得。
若以PSD 的中心點位置作為原點, 設電極1和電極2的距離為2L,電極1和電極2輸出的光電流分別為I1和I2,則電極3上的電流為總電流I0,并且,I0=I1+I2,圖6是PSD的斷層結構示意圖。

圖6 PSD的斷層結構示意圖Fig.6 Schematic diagram of fault structure of PSD
光點離中心點的距離為xA,于是有:
(1)
利用式(1),即可確定光斑能量中心相對于器件中心的位置xA,它只與光電流I1,I2的和、差及比值有關,而與總電流無關(即與入射光功率的大小無關)。
對于二維PSD有四個電流輸出端,分別為I1,I2,I3,I4,二維PSD 的中心點位置作為原點,光點坐標為(x,y)。式中I1,I2,I3,I4是PSD的四個電極的光電流輸出,L對于具體的PSD器件實際長度是一個常量。可得光點位置坐標為:
3 基于PSD的彈體姿態測量精度分析
在幾何光學中有任意入射角α的平行光束透過凸透鏡后會在焦平面上匯聚為一點,如圖7所示。

圖7 PSD測量原理圖Fig.7 PSD measurement principle diagram

β=arctan(x/f)
(2)
γ=arctan(y/f)
(3)
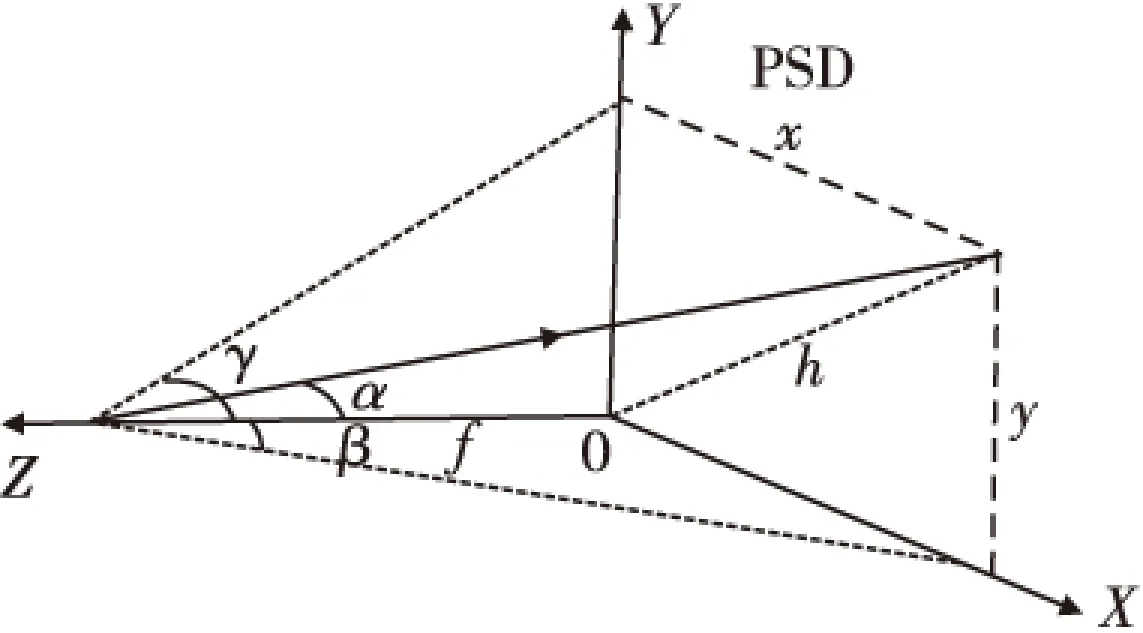
圖8 角度分解Fig.8 Angle decomposition
對于二維PSD輸出的電流信號經過信號處理可得出兩路電壓表示光點在PSD面上的二維坐標,焦距f為常數,因此,通過式(2)和式(3)可得出平行光束與PSD軸線水平和垂直方向夾角。
影響PSD測量彈體姿態(俯仰、偏航)角度精度的因素:
1)由式(2)、式(3)可知,測角范圍與PSD接收范圍成正比,與凸透鏡的焦距成反比。條件形同情況下,PSD精度越高,測角精度越高。
針對槍榴彈小型化、低成本的要求,光學系統焦距f取10 mm,PSD選擇光敏面積為10 mm×10 mm,精度為0.05 mm的器件,按照上述參數,偏航和俯仰角度測量范圍為-26.6o~+26.6o,根據式(2)和式(3)可得出測角精度為0.29°;
2)光學系統與PSD裝配誤差所引起的測角系統誤差。裝配精度越高,誤差越小。誤差來源有光學鏡片與PSD的平行度、同軸度以及光學鏡片與PSD的前后位置精度。

圖9 裝配引起的偏差Fig.9 Deviation caused by assembly
如圖9所示,若入射角為β,焦距誤差為Δf,透鏡與PSD之間平行度誤差Δγ,則PSD位置測量誤差Δa為
Δa=AB-A′B′=ftanβ-(f+Δf)sinβ/cos(β-Δγ)
(4)
按照一般的裝配工藝和精度,平行度誤差一般為0.01 rad,焦距誤差為0.01 mm,在測量范圍為-26.6o~+26.6o,焦距f=10 mm時,根據式(4),算出誤差Δa為0.09 mm,根據式(2)換算成角度為0.52o。
3))放大電路噪聲是產生信號處理電路的主要誤差來源,主要是光電探測器PSD內噪聲及運算放大器帶來的噪聲,圖10是PSD等效噪聲模型[7]。

圖10 PSD等效噪聲模型Fig.10 PSD equivalent noise model
圖中,I0為總光電流,ID為PSD內暗電流,Cj為結電容,Rf為反饋電阻,B為電路帶寬。選取低成本的PSD器件的相關參數:總光電流I0為10μA,PSD內暗電流ID為0.1 μA,PSD等效電阻ri為1.2 kΩ。電路帶寬為10 kHz, 反饋電阻10 Ω。根據參考文獻[7]提供的公式可以算出:
散粒噪聲:
PSD電阻熱噪聲:
運算放大器輸入等效電壓噪聲在輸出端值:
其中,en為運放等效輸入電壓噪聲。
反饋電阻的熱噪聲:
則總輸出端噪聲電壓為:
前置電路為整個放大電路的主要噪聲來源,若噪聲經放大電路全部放大,則為1.2mV。實際,噪聲經濾波處理,不可能完全被放大,存在很大程度的衰減,所以假定最終噪聲電壓為1mV。設定光斑落在PSD面上某點處總光電流為10μA,則四個輸出端電流I1為 3μA,I2為1μA,I3為2μA,I4為4μA,經最終放大處理,電壓分別為3V,1V,2V,4V,則位置偏移量為:
在不考慮噪聲造成誤差情況下,光斑落點的位置偏移量X=2mm;但由于噪聲存在,對位置偏移量產生一定的誤差,其結果X′=1.99mm。
噪聲引起的誤差偏移量:δs=X- X′=0.01mm,根據式(2)換算成角度為0.06o。
綜合以上PSD精度誤差,裝配誤差和噪聲誤差共同引起系統的測量精度:
一般用于簡易彈道修正的彈丸俯仰和偏航角度測量誤差要求不大于1o。而基于光電位置傳感器的彈丸俯仰和偏航角度測量誤差為0.60o。這一精度滿足彈道修正對彈丸姿態測量精度的要求。
利用光電位置傳感器PSD一種組件同時實現彈道偏差和彈體姿態兩種功能,將光電編碼傳感器與慣性測量組件分別實現的功能集為一體大大減小體積,另外光電位置傳感器PSD為通用化商用器件,比起專門研制、成本較高的慣性光性測量組件,可大大降低成本。
4 結論
本文提出了基于光電位置傳感器的彈道偏航與姿態測量方法,該方法利用光電位置傳感器PSD代替傳統光電編碼傳感器完成彈道偏差測量,光電位置傳感器還根據激光光斑在光電位置傳感器上的位置代替傳統慣性測量組件判斷偏航角、俯仰角。同時實現彈丸彈道偏航與姿態角測量兩種功能。精度評價分析表明,該方法測量彈丸俯仰和偏航角度精度高,理論精度為0.6°,滿足彈道高精度修正引信對體丸姿態測量誤差不大于1°的要求,同時具有體積小,成本低的優點。擬在小口徑彈藥的激光駕束制導中使用該方法。
[1]馬利國,伍波,周鼎富,等.10.6μm激光駕束制導儀編碼調制器的設計[J].紅外與激光工程,2010(1):71-75.
[2]張會素.基于PSD技術精度靶測試方法研究[D].西安:西安工業大學,2014.
[3]冀偉.激光束位置及角度偏差測量系統[D].長春:長春理工大學,2009.
[4]牟麗娜.基于PSD的位移檢測系統設計[D].太原:中北大學,2007.
[5]朱國力,吳學兵,鄒萬軍.基于PSD的角度測量系統[J].電測與儀表,2006(1):29-32.
[6]安毓英,曾曉東,馮喆珺.光電探測與信號處理[M].北京:科學出版社,2010:128-135.
[7]江孝國,李洪,楊興林,等.位置敏感探測器測量電路噪聲分析[J].信息與電子工程,2010,8(1):97-98.
[8]JeraldGraeme.光電二極管及其放大電路設計[M].賴康生,許祖茂,王曉旭,譯.北京:科學出版社,2012:89-109.
[9]梁志劍,馬鐵華,范錦彪,等.飛行體姿態慣性測量技術綜述[J].探測與控制學報,2010,32(5):11-15.
Ballistic Yaw and Attitude Measurement Based On PSD
HOU Wanggao,CHEN Zuntian,CUI Jinglin
(Science and Technology on Electromechanical Dynamic Control Laboratory,Xi’an 710065,China)
In view of the large volume,high cost and complexity of the traditional laser beam riding guidance trajectory and yaw attitude measurement to inertial measurement unit,a ballistic yaw and attitude angle measurement method based on PSD was put forward.The method of using PSD instead of traditional photoelectric coding sensor could complete ballistic measurement deviation, the location of the laser spot based on PSD replaced the traditional inertial measurement component judgment yaw angle and pitching Angle. At the same time, the measurement of projectile trajectory and attitude angle was realized. The measurement accuracy evaluation analysis showed that the proposed method of measuring projectile yaw angle and pitching angle measurement accuracy could reach 0.60°, which meet the application requirements of small caliber grenade trajectory correction.
laser-beam riding guidance; ballistic correction;PSD; projectile attitude measurement
2016-11-15
侯望高(1992—),男,陜西西安人,碩士研究生,研究方向:機械電子工程。E-mail:1002311783@qq.com。
TJ765
A
1008-1194(2017)02-0049-05
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
