基于虛擬儀器的正弦動態壓力校準技術研究
2017-06-01 12:20:29楊水旺郭洪巖
宇航計測技術 2017年1期
黃 瑩 楊水旺 趙 博 郭洪巖 江 峰
(北京振興計量測試研究所,北京100074)
基于虛擬儀器的正弦動態壓力校準技術研究
黃 瑩 楊水旺 趙 博 郭洪巖 江 峰
(北京振興計量測試研究所,北京100074)
本文針對壓力傳感器動態校準需求,提出了一種基于虛擬儀器的正弦動態壓力校準方法,設計了正弦動態壓力校準系統,分別從總體設計方案、硬件配置及軟件控制三方面進行介紹,然后對正弦動態壓力校準系統進行試驗及不確定度評定,結果表明該方法可行有效,可滿足航空航天、工業領域中對壓力動態測量要求。
壓力傳感器 動態校準 虛擬儀器
1 引 言
隨著我國航空航天工業的快速發展,動態壓力已廣泛應用于工業生產和科研領域中。目前,在使用壓力傳感器前一般只進行靜態校準,得到其靜態性能參數,然而在實際應用中,壓力傳感器僅用于測量靜態壓力情況較少,因此需進行動態特性校準,根據動態性能參數判斷壓力傳感器測量變化的壓力系統能力,以滿足航空航天、工業領域中對壓力動態測量要求。
2 正弦動態壓力校準系統
2.1 正弦動態壓力校準系統原理
正弦動態壓力校準系統組成如圖1所示,系統主要由氣源、氣壓減壓器、電磁閥、動態壓力發生器、電機及電機系統、數據采集卡、信號放大器等組成。正弦動態壓力校準是一種相對法校準,采用出口調制式正弦壓力發生器,將標準壓力傳感器與被校壓力傳感器對稱齊平安裝,使其感受相同壓力[1]。通過氣源、氣壓減壓器及電磁閥給正弦動態壓力發生器提供恒定壓力。通過步進電機和三相異步電機帶動正弦動態壓力發生器轉盤轉動,并調節電機的轉速來產生不同頻率的正弦壓力波。通過數據采集卡同步采集標準壓力傳感器和被校壓力傳感器的輸出信號,分析、處理采集到的輸出信號,從而得到被校壓力傳感器的幅頻特性和相頻特性。
2.2 硬件系統
2.2.1 電機及電機驅動系統
為實現正弦動態壓力發生器產生0.1Hz~20kHz壓力信號,壓力傳感器正弦動態校準系統采用兩臺電機分別進行控制,根據兩臺電機不同的運行速度對應正弦動態壓力發生器產生不同頻率的正弦壓力波,利用三相異步電機中高速運動產生中高頻(20Hz~20kHz)正弦動態壓力波,利用步進電機低速運動產生低頻(0.01Hz~20Hz)正弦動態壓力波。
1)三相異步電機
三相異步電機是將交流電能轉化為機械能來驅動轉子盤運轉和定位的一種電機,其利用交流電和定子線圈產生旋轉磁場,根據電磁感應定律帶動轉子線圈轉動。
三相異步電動機轉速表達式為:
式中:n——轉速;S——變轉差率;f1——電源頻率; P——變磁極對數。
因此,三相異步電機的調速方法有三種:變磁極對數P調速;變轉差率S調速;變電源頻率f調速。變電源頻率調速可實現大范圍無級平滑調速,調速后機械特性平行,硬度不變,帶負載能力不變。本文選用變電源頻率調速的方法,通過變頻器輸出0~10V的直流控制信號來控制三相異步電機的轉速。
2)步進電機
步進電機是將電脈沖信號轉變為角位移或線位移的執行元件,其運轉由電脈沖信號控制,步進電機的角位移量與脈沖數成正比,每給一個脈沖,步進電機就轉動一個角度。步進電機和步進電機驅動器構成了步進電機驅動系統,當步進電機驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動固定的角度。通過改變脈沖輸入頻率可改變相應單位時間內電機轉動的角度,從而實現控制步進電機運轉速度的目的。
2.2.2 數據采集系統
壓力傳感器正弦動態校準系統需同時采集標準壓力傳感器和被校壓力傳感器輸出信號,所以數據采集卡至少需2個數據采集通道。若數據采集卡不能同步采集數據而引起相位差,將直接影響校準結果。因此,數據采集卡需同步采集兩路信號。按模擬信號轉為數字信號表示時一個正弦波形至少需10個數據點才能被準確還原的原理,同時為盡可能提高校準準確度,要求一個正弦波形至少采集100~200個數據點進行數據分析,在設計時以一個正弦波采集200個數據點為依據選擇數據采集卡[3]。根據正弦動態壓力發生器產生的波形頻率為(0.1~20k)Hz的指標,因此選擇的數據采集卡的采樣率應達到4MHz。
2.2.3 氣源及調壓系統
正弦動態壓力校準系統的調壓范圍為(0~10) MPa,根據氣源的最小壓力應高于正弦動態壓力波峰值的1.5~3倍的原則,選擇供氣壓力為15MPa的氮氣高壓氣瓶以得到穩定壓力,并通過氣壓減壓器達到減壓目的。高壓校準時,控制高壓電磁閥給正弦動態壓力發生器供氣;低壓校準時,控制低壓電磁閥給正弦動態壓力發生器供氣。
2.3 軟件系統
目前應用最廣泛的虛擬儀器軟件開發平臺是NI公司的Labview平臺,它是完全圖形化的開發工具,具有使用方便、易于學習等特點,同時提供了豐富的人機界面開發控件和成熟穩定的PXI硬件驅動接口。
2.3.1 軟件需求分析
根據正弦動態壓力校準系統的要求,軟件主要完成了以下任務:
1)在主界面進行壓力傳感器正弦動態校準系統的參數設置,包括傳感器編號、頻率設定值等;
2)數據采集控制模塊實現電磁閥控制、電機控制、數據采集等功能;
3)數據分析模塊對采集到的數據進行處理、分析,得到被校壓力傳感器的幅頻特性及相頻特性。
2.3.2 軟件流程圖
正弦動態壓力校準系統軟件流程圖如圖3所示。首先進行參數設置,其次系統運行,然后進行正弦壓力調試。電機控制子程序開始運行,與此同時打開電磁閥給正弦動態壓力發生器供氣,數據采集卡開始同步采集數據并對信號頻率進行分析,得到標準壓力傳感器感受到的壓力信號的頻率值,當此頻率值等于設定頻率值時,數據采集卡采集數據并進行記錄,當此頻率值小于設定頻率值,則電機加速運行;當此頻率值大于設定頻率值時,電機減速運行;記錄完成后關閉電磁閥且電機停止運行;同時對采集到的數據進行分析、處理、顯示。完成以上操作后,結束試驗。
2.3.3 虛擬儀器界面設計
壓力傳感器正弦動態校準系統的主界面即為系統控制界面,前面板如圖4所示。
在該界面上完成傳感器編號及頻率值設定、電機轉速自動控制、電磁閥控制以及數據采集功能,并實時顯示采集到的壓力波形。
3 正弦動態壓力校準系統試驗
將標準壓力傳感器與被校壓力傳感器安裝在正弦動態壓力發生器齊平對稱的安裝位置處,調節正弦動態壓力發生器的進口壓力為2MPa,當壓力值穩定后,設置壓力變化頻率,得到壓力為2MPa時各頻率點的測量數據,見表1。
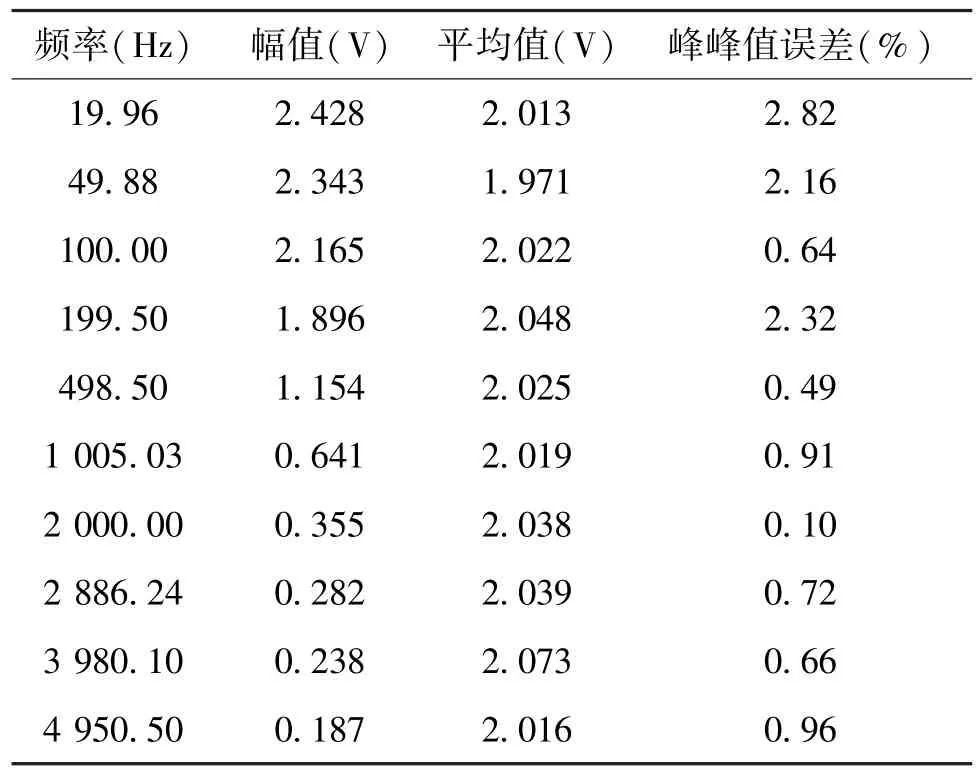
表1 設定壓力為2MPa時各頻率點的測量數據
正弦壓力發生器的壓力值由供氣壓力值確定。保持頻率一定,調節減壓調節器控制壓力大小。當壓力小于1MPa時,采用低壓電磁閥控制氣路通斷,當壓力大于1MPa時,采用高壓電磁閥控制氣路通斷。將頻率設為1kHz,被校壓力傳感器在各壓力值點的測試數據,見表2。
當壓力傳感器正弦動態校準系統加壓至2MPa時,打開電磁閥,通過觀察安裝在壓力室入口處的數字壓力計的壓力值判斷系統穩定性。試驗數據見表3,根據試驗結果,壓力室入口壓力值穩定性符合要求。
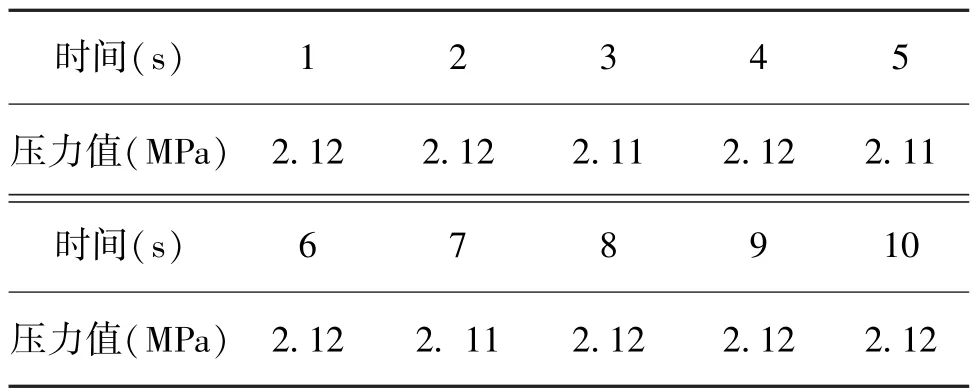
表3 壓力室穩定性試驗數據
將標準壓力傳感器與被校壓力傳感器對稱齊平安裝在正弦壓力發生器兩端,在給定進氣壓力不變的情況下,調節壓力發生頻率,得出被校壓力傳感器的測試數據,見表4。
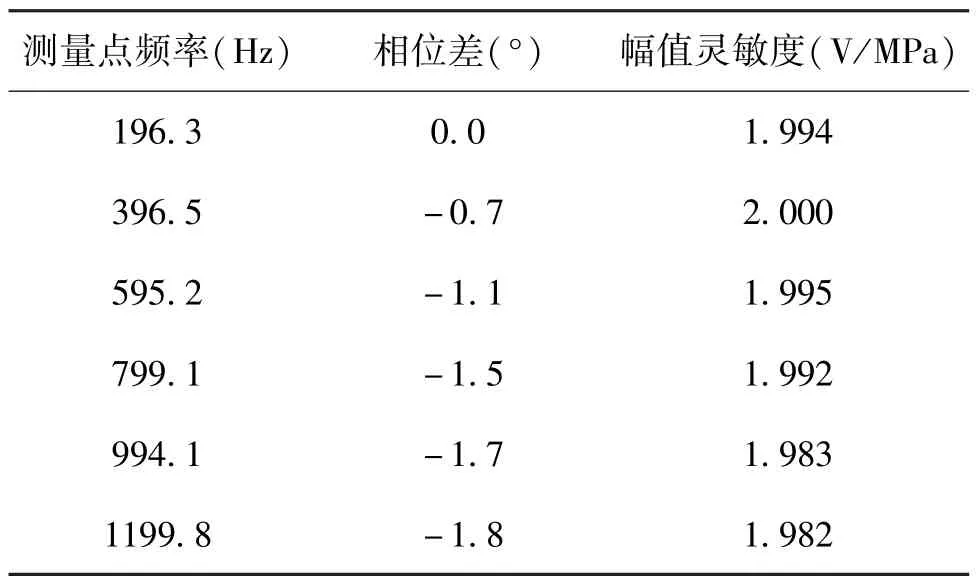
表4 不同頻率下被校傳感器測試數據
4 不確定度評定
壓力傳感器正弦動態校準系統主要用于校準動態壓力傳感器的幅值靈敏度和相移,校準結果的可信度可通過測量不確定度來表征。
4.1 建立數學模型
4.1.1 幅值靈敏度
在確定的頻率點下,被校壓力傳感器的幅值靈敏度為:
式中:U——被校壓力傳感器的測量電壓;P——被校傳感器的壓力幅值;Ub——標準壓力傳感器的測量電壓;Kb——標準壓力傳感器的幅值靈敏度。
由于式(1)中的U,Ub,Kb互不相關,所以被校壓力傳感器的幅值靈敏度的標準不確定度為:
被校傳感器的幅值靈敏度的相對標準不確定度為:
4.1.2 相移
在確定的頻率點下,被校壓力傳感器的相移為:
式中:φ——被校壓力傳感器輸出的相位值;φb——標準壓力傳感器輸出的相位值[5]。
由于式(4)中的φ、φb互不相關,所以被校壓力傳感器的相移的標準不確定度為:
4.2 幅值靈敏度測量不確定來源
1)標準壓力傳感器引入的不確定度分量
標準壓力傳感器幅值靈敏度的測量不確定度為1%,k=2,所以標準壓力傳感器引入的幅值靈敏度不確定度分量為urel(Kb)=1%/2=0.5%。
2)數據采集引入的不確定度分量
3)信號調理引入的不確定度分量
4)計算方法引入的不確定度分量
計算方法引入的幅值靈敏度不確定度分量為urel(Ub3)≈0.23%。
5)測量重復性引入不確定度分量
測量重復性引入不確定度分量為urel(c)=0.56%。
6)正弦壓力發生器中傳感器安裝位置不同引入的不確定度分量

由于以上各不確定度分量各不相關,因此合成相對標準不確定度為:
因此,當k=2時,幅值靈敏度的相對擴展不確定度為Urel(K)=k·urel=1.7%。
4.3 相移測量不確定度來源
1)標準壓力傳感器引入的不確定度分量
標準壓力傳感器相位的測量不確定度為1°, k=2,標準不確定度為u(φb)=1°/2=0.5°。
2)數據采集引入的不確定度分量
3)信號調理引入的不確定度分量
4)計算方法引入的不確定度分量
計算方法引入的相移不確定度分量為u(φb3)≈0.01°。
5)測量重復性引入的不確定度分量
測量重復性引入不確定度分量為 u(Δφc) =0.14°。
6)正弦壓力發生器中傳感器安裝位置不同引入的不確定度分量
由于以上各不確定度分量各不相關,因此合成相對標準不確定度為:
當k=2時,相移的擴展不確定度為U(Δφ)= 2×u(Δφ)=1.2°。
5 結束語
本文采用正弦動態壓力發生器,提出一種基于虛擬儀器的正弦動態校準系統方案,利用步進電機和三相異步電機帶動正弦動態壓力發生器的轉盤轉動,通過調節電機轉速產生不同頻率的正弦壓力波,通過數據采集卡同步采集標準壓力傳感器和被校壓力傳感器輸出信號,經分析處理后可獲得被校壓力傳感器幅頻特性和相頻特性。
[1] 劉向陽,方繼明.正弦壓力發生器在傳感器動態校準中的應用[J].傳感器技術,2001(3):36~38.
[2] JJG 624—2005,動態壓力傳感器檢定規程[S].
[3] 王德兵.正弦壓力試驗裝置的組建[J].計測技術, 2009,29:36~39.
[4] 陳樹學,劉萱.Labview寶典[M].北京:電子工業出版社.
[5] 中國計量測試學會壓力計量專業委員會.壓力測量不確定度評定實例[M].中國質檢出版社,2012.
Research on Sinusoidal Dynamic Pressure Calibration based on Virtual Instrument
HUANG Ying YANG Shui-wang ZHAO Bo GUO Hong-yan JIANG Feng
(Beijing Zhenxing Institute of Metrology and Measurement,Beijing 100074,China)
According to the dynamic calibration needs of pressure transducer,a method of sinusoidal dynamic pressure calibration based on virtual instrument is proposed.The system of sinusoidal dynamic pressure calibration based on Labview is designed in this paper,including overall design schemes,hardware configuration and software control.This paper also performs a test on the system of sinusoidal dynamic pressure and gives the uncertainty evaluation.The result shows that the method is feasible and effective and it meets the need of dynamic pressure measurement in aerospace and industrial areas.
Pressure transducer Dynamic calibration Virtual instrument
1000-7202(2017)01-0055-05
TP74.5
A
2016-07-12,
2017-01-25
黃瑩(1991-),女,助理工程師,主要研究方向:力學計量校準技術。
