基于自主飛行器的農林植物樣本檢測系統的設計
2017-06-03 03:26:54杜雨杭單超穎肖昌明孫杰
電子技術與軟件工程 2017年9期
關鍵詞:單片機
杜雨杭++單超穎++肖昌明++孫杰
摘 要本次項目采用STC89C52單片機作為四旋翼的檢測核心,采用STM32單片機作為四旋翼飛行姿態控制核心;采用L3G4200D低功率三軸角速度傳感器;采用ADXL345三軸低功率加速度計;采用無刷電機實現飛行功能;采用穩壓電源提供電源;實現了四旋翼自主飛行模式,飛行器在飛行過程中實現多角度智能拍攝等控制功能為一體的四旋翼飛行器設計。
【關鍵詞】單片機 四旋翼 航拍
1 引言
隨著自動化技術的日益發展,國內外對四旋翼飛行器技術的研究越來越成熟,本應用是對于農林植物樣本的檢測,四旋翼飛行器除了基本的飛行功能之外還增加了利用溫濕度傳感器測量農林樣本的溫濕度,增加攝像功能,能夠檢測樣本的長勢,病蟲草害分布等較為全面的信息,地面站可以通過四旋翼飛行器攜帶的無線發射端對四旋翼飛行器進行航線規劃,z在要求的地點通過傳感器采集溫濕度與攝像數據,由無線發射模塊發射,地面接收端通過RS232串口將數據傳輸到計算機。
2 硬件設計
2.1 STM32模塊
為了能夠對四旋翼飛行器進行良好的控制,需要設計一個高性能的飛行控制模塊,因此控制芯片必須滿足響應及時、處理能力強、可靠性高等基本要求,即能夠快速地響應處理控制信號與傳感器信號,并能快速實現控制器的算法。
本文采用了STM32F103系列中等容量增強型微控制器,STM32系列微控制器采用ARM32位的Cortex-M3內核,該內核是ARM公司專為低功耗領域設計的,其優點是低成本、高性能,從而采用低功耗元件從而延長飛行時間,最高可達72MHz運行頻率頻率,可以進行復雜的運算如單周期懲罰和硬件除法,具有80個快速GPIO接口,可以映射到各個外部中斷向量,并且能夠接收5V的信號,還具有多個定時器、通信接口,其中包括2個IIC接口,2個SPI接口,3個USERT接口以及CAN接口和USB接口等,能夠滿足飛行控制模塊的基本需求。
2.2 STC89C52單片機
本模塊采用STC89C52單片機作為姿態信息處理器。單片機基本系統由最小系統與外圍信號I/O口組成,最小系統包括晶振、電源、復位電路。有了以上三塊,單片機就能夠正常工作了。用單片機作為傳感器的控制核心,可以接收到各個傳感器的輸入信號,并能夠通過無線發射端將溫度傳感器、濕度傳感器和攝像頭的信號傳送給地面計算機。
四旋翼飛行器的控制系統的主控芯片是STM32芯片,處理飛行器的控制算法部分,另一片是STC89C52,主要功能是傳感器信號采集和姿態信息處理以及數據的傳輸。兩板之間以串口傳輸到主控板上,以便于主控板能夠具有姿態反饋控制,形成一個閉環反饋系統。
2.3 陀螺傳感器
本文采用的是L3G4200D低功率三軸角速度傳感器, L3G4200D有兩種數字的輸出接口IIC/SPI,該陀螺傳感器具有16比特率的數據輸出和性價比高、體積小等特點。
2.4 加速度計
ADXL345是一款三軸低功率加速度計,其體積小,功耗低,并能檢測多種運動狀態,通過對比對應軸上的加速度與設置是否存在差異來判別是否運動。并能夠檢測出來任意方向的單振和多振。還可以檢測是否在自由落體的掉落狀態。處理器通過中斷方式讀取數據,為了盡可能提高測量精度,在器件電源處應多使用電容來進行去耦處理。
2.5 溫度濕度傳感器
DHT11數字溫濕度傳感器采單總線數據格式,節省I/O端口,其采樣周期為1s,其1個管腳與單片機接口連接,可以與單片機進行雙向數據傳輸。通過89C52單片機發送控制信號給傳感器進行數據采集,將溫濕度模擬信號轉化為數字信號傳送給單片機,最終發射到地面計算機站。
2.6 攝像模塊
本文選擇悅翔FPV攝像頭。圖像清晰細膩,色彩逼真,照度低,寬電壓,圍攻好,換動態。工作電壓:DC12V(寬電壓,實測可以7.5-13V正常工作),工作電流:70mA,工作溫度:-20-60
2.7 電機選型
本文采用朗宇A2216無刷電機作為四旋翼飛行器的驅動電機。主要考慮了電機的KV值、驅動功率、和重量的綜合因素。KV值表示的是無刷電機空轉增加的轉速值與輸入電壓的關系。通過實驗發現當四旋翼飛行器采用KV值為1000左右的無刷電機驅動螺旋槳時效率較高。
2.8 電機驅動選型
本四旋翼飛行器采用無刷電機驅動,需要選用配套的無刷電機驅動器,無刷電機驅動器電路較復雜并且是三相電機,需要選擇最大電壓大于11V,最大電流大于13A的驅動器,由于該無刷電機最大功率大,需要選用散熱性好的驅動器來降低發熱量。本文選用好盈天行者無刷電調,其品質優異并且價格低廉。
2.9 電源模塊
本設計中使用3種電源:11V、5V、3.3V。11V用來給電機驅動供電;5V給80C52單片機供電;3.3V給STM32F103系列的微控制器、L3G4200D三軸角速度傳感器模塊、ADXL345加速度計模塊、DHT11數字溫濕度傳感器供電。采用78L05線性穩壓芯片將11.1V的航模電壓降到5V,然后用TI公司推出的TPS7333將5V電源降壓得到3.3V。
2.10 無線通信模塊
本文采用的是nRF24L01無線傳輸模塊,其工作在2.4GHz-2.5GHz的通用ISM頻段。傳輸速率可達1-2Mbps,傳播距離為5-1000m,并具有功耗低、成本低、尺寸小的特點。在發射模式下發送-6dBm時電流消耗為9mA,接收模式時為12.3mA,功耗最低。具有CRC校驗和內置完整通信協議,還具有自動應答與自動重發的功能,通過SPI接口完成通信,連接到單片機,完成傳輸過程。
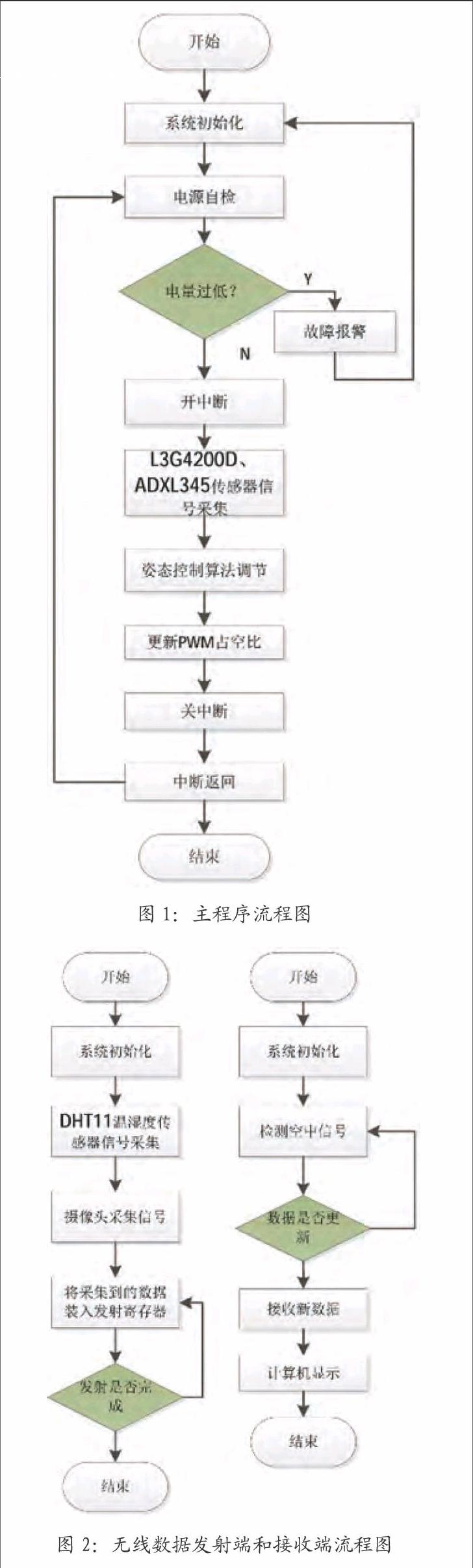
3 軟件設計
如圖1、2所示。
4 總結
本系統的設計以STM32單片機與STC89C52單片機為控制核心,利用了多種類型傳感器,將各種軟硬件相結合。本系統能實現如下功能:四旋翼能夠平穩起動,按照要求的軌跡進行飛行,穩定降落。四旋翼在飛行中能夠傳回溫度濕度信息,將攝像頭采集到的畫面通過通訊傳輸給顯示器。
參考文獻
[1]江哲.基于STM32的四旋翼飛行器的設計與實現[D].華東理工大學,2015.
[2]段世華.四旋翼飛行器控制系統的設計和實現[D].電子科技大學,2012.
[3]李堯.四旋翼飛行器控制系統設計[D].大連理工大學,2013.
[4]郭凱.基于STM32單片機的四軸飛行器設計及控制技術的研究[D].安徽理工大學,2016.
[5]王福超.四旋翼無人飛行器控制系統設計與實現[D].哈爾濱工程大學,2013.
[6]扈菲菲.農田環境四旋翼UAV信息采集系統及航跡規劃研究[D].河南科技大學,2013.
[7]金大鵬.四旋翼無人飛行器控制器的設計與實現[D].東北大學,2010.
作者單位
沈陽城市建設學院信息與控制工程系 遼寧省沈陽市 110000
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36