一種傾動電機松閘控制方法
2017-06-05 15:17:41蘇瑞淼中冶南方工程技術有限公司湖北武漢430223
自動化博覽 2017年3期
★蘇瑞淼(中冶南方工程技術有限公司,湖北 武漢 430223)
一種傾動電機松閘控制方法
★蘇瑞淼(中冶南方工程技術有限公司,湖北 武漢 430223)
本文論述一種采用最小二乘法估算的傾動力矩控制電機松閘的方法。在轉爐運行階段通過實時的測量轉爐傾動電機的輸出轉矩和轉速,使用帶遺忘因子的遞推最小二乘法在線的估算出轉爐自重轉矩大小。當轉爐每次起動時,使用上一次停車時估算的自重轉矩作為判斷松開抱閘時刻的依據。
轉爐傾動;最小二乘法;參數辨識;松閘控制
1 引言
轉爐是一種重要的煉鋼設備,傾動機構能驅動它±360旋轉以實現兌鐵水、測溫取樣、出鋼、倒渣等工藝操作過程。目前大多數傾動機構采用四點嚙合的全懸掛型式,力矩平衡機構為扭力桿裝置。傾動裝置主要由四臺交流電動機、四套一次減速機、一套二次減速機組成。控制系統包括一套PLC裝置和四臺變頻器。四臺電動機同步啟、制動,同步運行。電動機轉速可調。每臺電動機出軸聯軸器上配置有一套液壓電磁制動器(或稱作抱閘、剎車片)。 當轉爐停止時,制動器抱緊,依靠制動器閘瓦與電機出軸間的摩擦轉矩與轉爐自重轉矩相互平衡維持轉爐的靜止。當轉爐運行時,制動器松開,電動機驅動轉爐轉動。轉爐傾動裝置在冶煉操作中,由于工藝操作需要頻繁地啟停,所以松閘的控制格外重要。如果松閘太早以致電機輸出的驅動轉矩還未達到轉爐的自重轉矩則可能出現“溜車”現象,如果松閘太遲以致電機輸出的驅動轉矩遠大于轉爐的自重轉矩則可能導致啟動時加速度過大,引起轉爐轉速波動和震蕩[1]。傳統的松閘控制策略以電流作為判斷標準,當檢測到電機輸出電流大于固定閾值值時松開抱閘,而由于轉爐的自重轉矩是時變的,這種控制方法效果并不好。
2 最小二乘法模型辨識算法
一個單輸入單輸出系統的線性模型可以用以下差分方程表示[2]
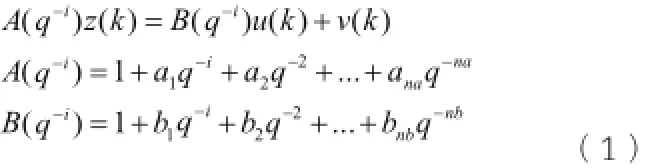
其中:q-i表示 階差分算子;
z( k)表示系統測量輸出變量;
u( k)表示系統輸入變量;
v( k)表示白噪聲;
ai, bi表示系統參數,為待識別項。
如果已知一組系統的輸入u( k)和系統的可測量輸出v( k),則可以通過最小二乘法計算出ai, bi的估計值。將(1)轉化為:

寫成向量形式為:


如果l組觀測數據,令k取0到l,利用式(3)可以構建l個方程組成以ai, bi為未知量的方程組,將方程組寫成向量形式為:

其中:
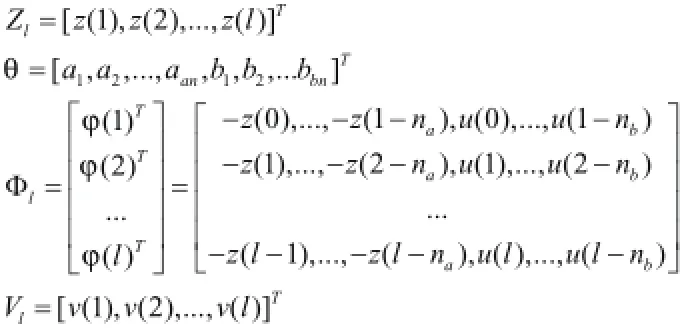
當l=na+nb+1方程組有唯一解,當l>na+nb+1,方程個數大于未知數個數,通過極小化下列準則函數得到方程的最小二乘解。

使J( θ)取最小的θ的估計值計為θ^,即為θ的最小二乘估計值。
使用導數法對(5)求取極小值,得到

如直接利用公式(6)對系統參數進行在線辨識,那么隨著觀測數據l的增加,lΦ,lZ矩陣的尺寸將變得很大,其占用的存儲空間和運算量將導致在線計算無法進行。為此對公式(6)變換后得到^θ的遞推計算公式,使之能夠用于在線參數辨識,經過推導得到^θ的遞推計算公式為:
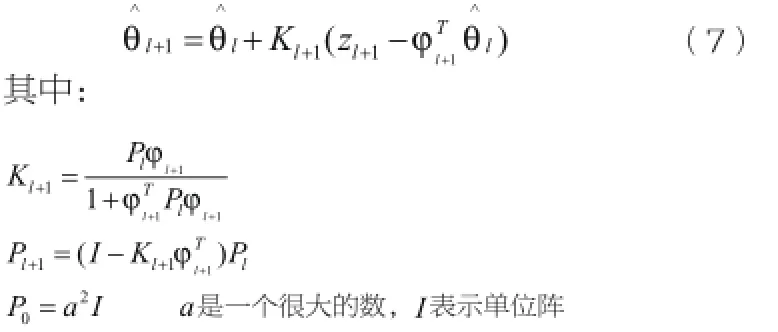
上述論述僅針對待辨識參數為常數時的情況,如果待辨識參數為實變參數,需要引入遺忘因子0<λ<1,并將的計算公式改為λ越大,算法的遺忘速度越慢,適合于參數隨時間緩慢變化的場合,λ越小,算法的遺忘速度越快,適合于參數隨時間快速變化的場合。
3 基于轉爐轉矩估計的松閘控制方法
傳統的轉爐松閘控制方法是判定電機電流大于某特定值后即松開抱閘,由于轉爐自重轉矩的大小隨轉爐角度變化而變化,且與鋼水裝入量、爐口粘渣情況等有很大關系,所以傳統松閘控制方法不可能保證每次松閘后電機輸出轉矩與轉爐自重轉矩相平衡,也就無法保證轉爐的平穩運行。如果能根據轉爐的運行狀態數據估算出轉爐自重轉矩大小,并由此來決定最佳抱閘松開時刻,就能夠保證松閘后轉爐的平穩運行。
對轉爐進行動力學分析,當轉爐自由運動,即沒有受到制動器約束時,將轉爐視為一個整體對象,它滿足以下運動方程[3]:

ω為轉爐角速度,可以通過已知的電機轉速和齒輪傳動比算出;
a為轉爐的角加速度,是角速度ω對時間的微分;
Tm為動力扭矩,即電機輸出力矩折算到二次減速機轉軸的值;
TST為阻力扭矩,即轉爐的自重轉矩;
J為轉爐轉動慣量。
根據上述公式和定義,得到任意第k個采樣周期系統的差分方程模型:

如果將a當作系統輸入,Tm當作系統的測量輸出,TST,J當作需要在線辨識的參數,則可以使用上述的最小二乘模型辨識算法對TST,J進行估計,由于TST,J是最傾動角度變化的變量,所以應該采用帶遺忘因子的最小二乘模型辨識算法。
將公式(9)轉化成標準最小二乘形式

其中:
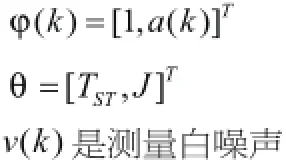
根據第二節的結論,TST(k)和J( k)的估計值的在線計算公式為:
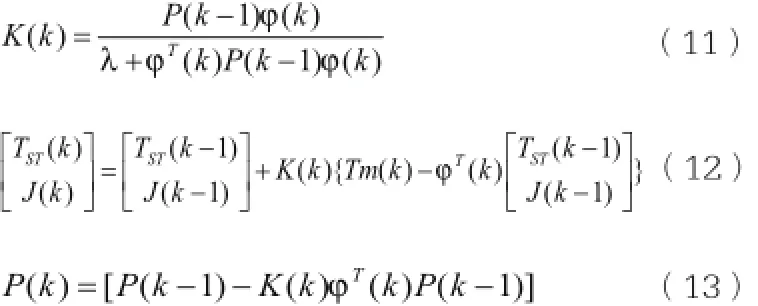
其中()Tm k可以通過讀取驅動電機的變頻器的轉矩輸出得到,()a k是電機的加速度,可以通過讀取電機編碼器的測量轉速然后差分得到,λ取0.9,即保證參數辨識能一定程度上跟隨參數的變化。
由于公式(8)只是在制動器完全松開的條件下成立,所以遞推計算過程需要轉爐運行階段制動器完全松開時才能開始,同時當制動器開始閉合時,遞推計算過程應該立即結束,否則將得到錯誤的STT估計值。
使用公式(11)~(13)能估算出本次轉爐運行周期抱閘閉合時刻的轉矩自重轉矩TST(N),當抱閘閉合后轉爐還將繼續運行一個小角度后才能停止,此時轉矩的自動轉矩為TST'。經過實際測量這個小角度的值不會大于0.05°,因此TST(N)和TST'之差將很小,所以可以使用TST(N)替代TST'作為轉爐制動器松開判斷條件的參數。
當轉爐再次運行時,如果設定轉速方向與自重轉矩方向相同,則自重轉矩將在轉爐加速起動過程中起到動力的作用,可以控制直接松開抱閘,但是由于在變頻器矢量控制模式下電機的啟動過程要經歷啟動→建立勵磁→輸出轉矩幾個階段。在輸出轉矩階段開始前電機還未處于速度閉環控制模式下,處于不可控狀態,所以為了保證安全,需要等待勵磁結束后才能松開制動器。如果設定轉速方向與自重轉矩方向相反,則當電機的輸出轉矩Tm等于轉爐自身轉矩TST'(實際處理用TST(N)替代)時松開抱閘效果最好,此時轉爐不受制動器閘瓦摩擦力作用,抱閘松開后合力為0,轉爐從0加速度逐步加速,能夠實現設備最平穩的加速運行。
4 實際應用和效果
為驗證本方法的正確性和可靠性,作者在某煉鋼車間的轉爐傾動控制系統上實施了該方法,該傾動控制系統由一臺西門子S7 412-2DP PLC和四臺西門子S120變頻器組成。PLC通過PROFIBUS-DP網絡[4]與變頻器通訊,如圖1所示。PLC以10ms采樣頻率從變頻器中讀取電機的輸出轉矩大小,求和得到轉爐的動力扭矩[5],同時讀取安裝在4臺傾動電機上的脈沖編碼器測量的電機轉速大小,求取平均值后在差分得到轉爐加速度。根據公式(11)~(13)即可計算出轉爐自身轉矩大小。雖然包含矩陣運算,但(11)~(13)都是大小2×2以下的小矩陣,可以直接展開成算術表達式來進行計算,PLC完全可以完成這種計算任務。
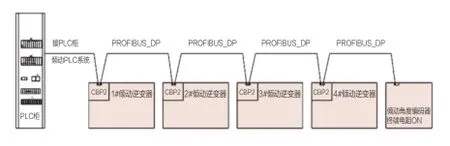
圖1 傾動控制系統結構
實際應用中松閘控制方法的工作步驟和流程如下:
(1)轉爐傾動控制PLC以10ms的中斷周期從四臺電機傾動變頻器中采樣傾動電機轉速ω1, ω2, ω3, ω4,傾動電機力矩T1, T2, T3, T4和電流I1, I2,I3,I4;
(2)轉爐開始運行時,確認抱閘全部打開到位后使用帶遺忘因子的遞推最小二乘法實時在線的估算轉爐自重轉矩;
(3)轉爐減速停車階段,抱閘開始閉合時記錄下估算的自重轉矩TST(N)、轉動慣量J( N)和輔助矩陣P( N)然后停止轉爐自重轉矩估算遞推過程;
(4)在下一次轉爐運行時,考慮下列兩種情況來控制抱閘的松開;
(5)當轉爐設定轉速ω與TST(N)方向相同,即TST(N)×ω≥≥0時,當檢測到每臺傾動電機的實際電流大于該電機的勵磁電流后松開抱閘;
(6)當轉爐設定轉速ω與TST(N)方向相反,即TST(N)×ω<0時,當檢測到四臺傾動電機合成輸出轉矩大于該位置下轉爐的自重轉矩后立即松開抱閘,即滿足T1+T2+T3+T4≥≥TST(N)條件后立即松開抱閘;
(7)當確認抱閘全部打開到位后,將TST(N)、J( N)和P( N)作為新一輪計算步驟中對應變量的初始值,轉到步驟2。
松閘控制方案的算法流程圖如圖2所示。
經過半年多的觀察驗證,采用本文提出的松閘控制方法后,轉爐系統啟動時的穩定性大大提高,沒有出現溜爐或者震顫的現象。AP
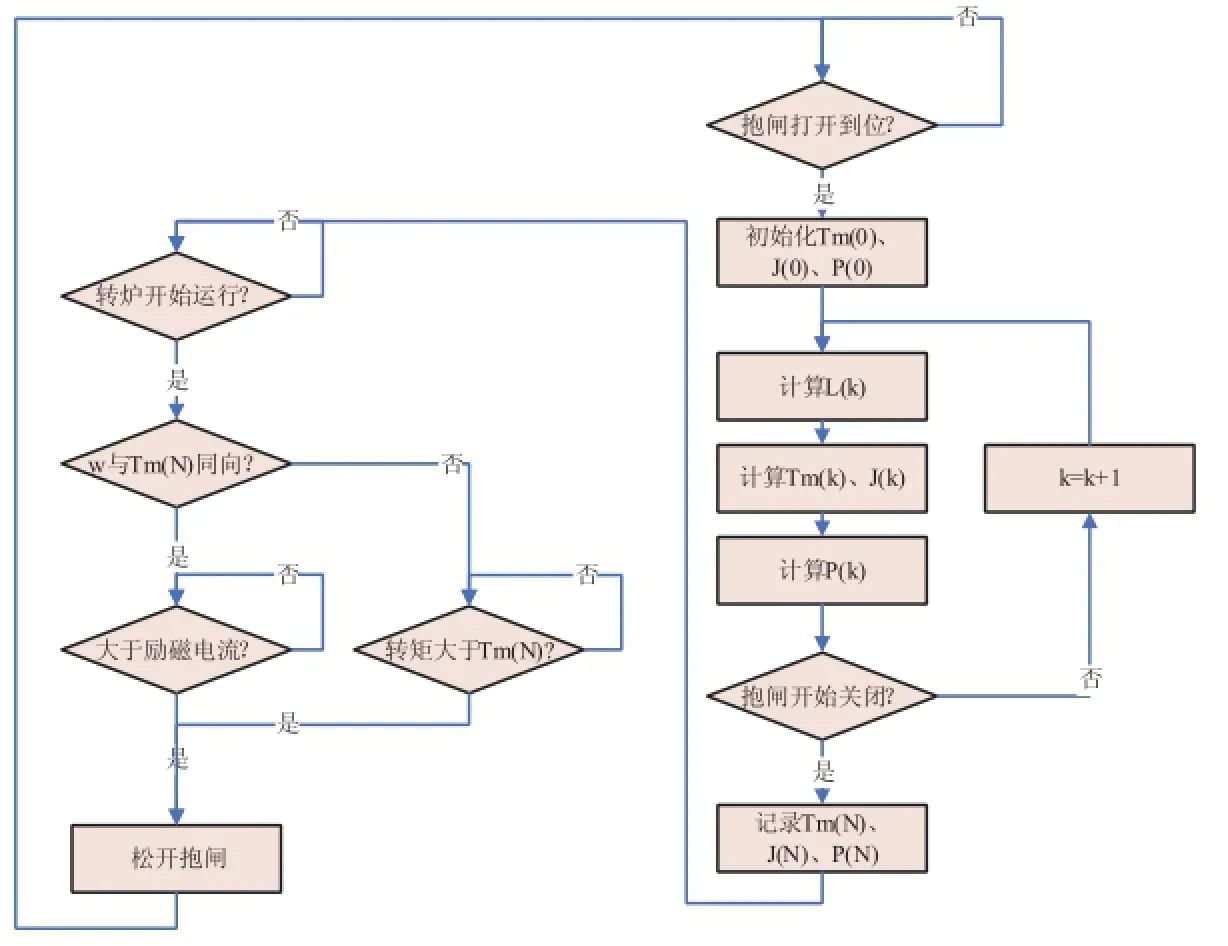
圖2 松閘控制算法流程圖
[1] 蘇瑞淼. 一種新型的轉爐傾動控制方法[J]. 自動化博覽, 2012, 29 ( 5 ) : 74 - 78.
[2] 龐中華, 崔紅. 系統辨識與自適應控制MATLAB仿真[M]. 北京:北京航空航天大學出版社, 2009.
[3] 嚴淑, 蔡煒. 轉爐傾動力矩在線實測法及分析[J]. 冶金設備, 2015, ( 4 ) : 38 - 42.
[4] 羅安. 現場總線技術與應用[J]. 自動化博覽, 2016, 33 ( S2 ) : 10 - 11.
[5] 張鐵力, 李曉佳. SINAMICS S120在上懸卸料離心機上的應用[J]. 自動化博覽, 2012, ( 7 ) : 56 - 59.
A Method for Brake Release Control of Tilting Motor
The paper presents a method for brake release control by torque estimation using the least square method. During the operating period of BOF, we measure the output torque and speed of its tilting motor. Based on these measurements, we estimate the weight of BOF online using recursive least squares method with forgetting factor. Every time the BOF starts, we use the weight estimated last time as the judgment for brake release. Key words: BOF tilting; Least sdquare method; Parameter ldentification; Brake release control
B
1003-0492(2017)03-0078-04
TM301.2
蘇瑞淼(1978-),男,湖北麻城人,高級工程師,現就職于中冶南方工程技術有限公司,主要研究方向為鋼鐵電氣傳動及自動化、企業信息化、項目管理。
★本文為863基金項目論文,項目名稱:冶金工業系統能效監測評估及優化控制技術與系統,項目編號2014AA041803。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
