基于激光陀螺自適應(yīng)補(bǔ)償?shù)拇w變形測(cè)量方法
2017-06-05 14:20:15楊云濤武文遠(yuǎn)呂海斌李兆兆
中國(guó)慣性技術(shù)學(xué)報(bào) 2017年2期
楊云濤,武文遠(yuǎn),呂海斌,李兆兆
(解放軍理工大學(xué) 理學(xué)院,南京 211101)
基于激光陀螺自適應(yīng)補(bǔ)償?shù)拇w變形測(cè)量方法
楊云濤,武文遠(yuǎn),呂海斌,李兆兆
(解放軍理工大學(xué) 理學(xué)院,南京 211101)
基于長(zhǎng)期變形、動(dòng)態(tài)撓曲變形以及陀螺隨機(jī)零偏的狀態(tài)方程,構(gòu)建了激光陀螺測(cè)量的慣性姿態(tài)匹配最優(yōu)濾波器,可以實(shí)時(shí)地估計(jì)出船體變形角。針對(duì)實(shí)時(shí)估計(jì)的長(zhǎng)期變形角具有偏置誤差的問(wèn)題,推導(dǎo)了慣性姿態(tài)匹配的誤差方程,指出動(dòng)態(tài)撓曲變形角與船體慣性姿態(tài)角之間具有長(zhǎng)時(shí)間的交叉相關(guān)耦合作用導(dǎo)致了長(zhǎng)期變形角估計(jì)具有偏置誤差,并提出了對(duì)輸入到最優(yōu)濾波器的激光陀螺角增量進(jìn)行自適應(yīng)補(bǔ)償?shù)姆椒▉?lái)抑制偏置誤差。實(shí)驗(yàn)結(jié)果表明,補(bǔ)償后俯仰角、橫滾角和艏撓角的偏置誤差均方根均小于5″,較補(bǔ)償前降低均方根誤差約為5″,該自適應(yīng)補(bǔ)償方法可有效地抑制偏置誤差,提高慣性姿態(tài)匹配方法在船體變形測(cè)量應(yīng)用中的有效性。
船體變形測(cè)量;激光陀螺;慣性姿態(tài)匹配;自適應(yīng)濾波
現(xiàn)代大型艦船上都配備有雷達(dá)監(jiān)測(cè)設(shè)備、武器發(fā)射設(shè)備、光學(xué)跟瞄設(shè)備和其它帶有基準(zhǔn)坐標(biāo)系的精密設(shè)備等。這些設(shè)備單元間都需要在統(tǒng)一的時(shí)空基準(zhǔn)下協(xié)同工作才能發(fā)揮整船的最大工作效能。一般地,時(shí)間基準(zhǔn)通常為GPS時(shí)鐘或船上當(dāng)?shù)貢r(shí)鐘信號(hào),空間基準(zhǔn)通常為船上的主慣導(dǎo)系統(tǒng),各設(shè)備單元從而建立各自準(zhǔn)確的空間姿態(tài)基準(zhǔn),即都以主慣導(dǎo)的坐標(biāo)系為基準(zhǔn)坐標(biāo)系。由于艦船不是嚴(yán)格的剛體,航行過(guò)程中船上各坐標(biāo)點(diǎn)間存在隨時(shí)間動(dòng)態(tài)變化的角位移,制約了各坐標(biāo)點(diǎn)的空間姿態(tài)精度[1-2]。文獻(xiàn)[3][4]指出,艦船的靜態(tài)變形角最大可達(dá)1°~1.5°,動(dòng)態(tài)撓曲變形角航向方向可達(dá)幾角分,俯仰角方向達(dá)十幾角分,橫滾方向可達(dá)幾分之一角分。如此大的變形角變化,大大降低了艦船設(shè)備單元的工作精度和效率[3],必須對(duì)動(dòng)態(tài)撓曲變形角進(jìn)行實(shí)時(shí)測(cè)量并補(bǔ)償。
文獻(xiàn)[3]提出了利用激光陀螺組合體測(cè)量船體變形角的角速度匹配方法,可以實(shí)現(xiàn)自主測(cè)量,環(huán)境適應(yīng)性強(qiáng),具有很強(qiáng)的可行性。文獻(xiàn)[5]在文獻(xiàn)[3]的基礎(chǔ)上,利用兩 LGU的陀螺角增量進(jìn)行積分計(jì)算,得到了機(jī)體坐標(biāo)系下的慣性姿態(tài)匹配測(cè)量方法。該方法相比角速度匹配測(cè)量方法具有測(cè)量信噪比高的優(yōu)點(diǎn)。文獻(xiàn)[6]在文獻(xiàn)[5]的基礎(chǔ)上引入靜態(tài)緩變模型,可以有效地估計(jì)長(zhǎng)期變形中的緩變量。文獻(xiàn)[7]提出了針對(duì)船體動(dòng)態(tài)撓曲變形模型參數(shù)的在線辨識(shí)算法。文獻(xiàn)[8]構(gòu)建了激光陀螺零偏誤差模型并實(shí)時(shí)補(bǔ)償,使得零偏誤差估計(jì)變得平穩(wěn)。文獻(xiàn)[9][10]分析了慣性量匹配方法中存在偏置誤差,提出了導(dǎo)致偏置誤差的耦合作用。文獻(xiàn)[11]基于角速度匹配誤差方程提出了一種靜態(tài)補(bǔ)償策略。但由于長(zhǎng)期變形近似為隨機(jī)游走過(guò)程[6],因此靜態(tài)補(bǔ)償并不能達(dá)到理想的補(bǔ)償效果。為了有效抑制偏置誤差并提高慣性姿態(tài)匹配測(cè)量方法的實(shí)用性,有必要研究一種自適應(yīng)補(bǔ)償方法。
1 慣性姿態(tài)匹配測(cè)量的最優(yōu)濾波器
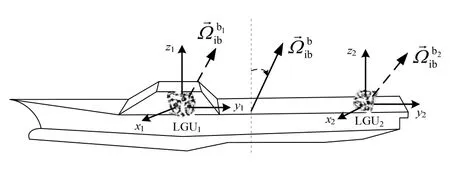
圖1 LGU測(cè)量船體角形變的原理示意圖Fig.1 Schematic of ship angular flexure measurement by LGU
根據(jù)文獻(xiàn)[5]小角度變形近似條件下的慣性姿態(tài)匹配測(cè)量方程為


根據(jù)頻譜分布的不同可以將船體變形劃分為長(zhǎng)期變形和動(dòng)態(tài)撓曲變形θ,其中受海浪影響而產(chǎn)生的船體動(dòng)態(tài)撓曲變形滿足 Mochalov等人提出的二階Markov平穩(wěn)隨機(jī)模型[3,12]為


激光陀螺隨機(jī)零偏也可近似為一階隨機(jī)游走過(guò)程[6]為

由式(1)~(7)可得狀態(tài)分量為15維的最優(yōu)濾波器,其狀態(tài)方程為

式中:為長(zhǎng)期變形項(xiàng);為動(dòng)態(tài)撓曲變形項(xiàng);為動(dòng)態(tài)撓曲變形的微分項(xiàng);為姿態(tài)誤差項(xiàng);為兩LGU的陀螺隨機(jī)零偏誤差的差值項(xiàng)。
綜上所述,式(1)~(8)即為慣性姿態(tài)匹配測(cè)量的最優(yōu)濾波器。
2 交叉相關(guān)耦合作用的影響
對(duì)式(1)兩邊差分,得誤差方程[10]為:

最優(yōu)濾波的結(jié)果使得式(9)滿足:

對(duì)式(10)兩邊取期望,得:

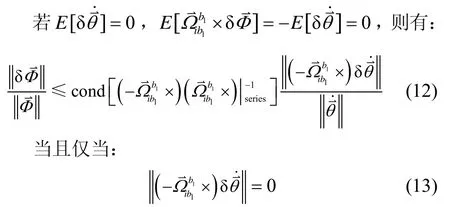
由式(13)可知,若動(dòng)態(tài)撓曲變形角與船體姿態(tài)角之間存在交叉相關(guān)性,則船體變形的最優(yōu)估計(jì)值將存在一定的偏移量上限值[10],直接制約著船體變形測(cè)量精度的提高,必須加以措施抑制。
3 基于激光陀螺輸出的自適應(yīng)補(bǔ)償
文獻(xiàn)[11]基于式(10)提出了對(duì)激光陀螺輸出補(bǔ)償?shù)牟呗裕⒎抡骝?yàn)證了其可行性。但由式(12)可知,該偏置性誤差實(shí)際上是一個(gè)統(tǒng)計(jì)上限值,因而具有統(tǒng)計(jì)隨機(jī)游走性質(zhì),使用先驗(yàn)的偏置誤差角來(lái)靜態(tài)補(bǔ)償交叉相關(guān)耦合作用并不合理。
將式(10)改為

對(duì)式(14)兩邊取方差得:

式中,var[·]表示取標(biāo)準(zhǔn)方差。由此可知,長(zhǎng)期變形誤差δ的范數(shù)平方近似為誤差δ的比例因子,這可以解釋動(dòng)態(tài)撓曲變形要比長(zhǎng)期變形的?估計(jì)精度始終要高,觀測(cè)度更強(qiáng)。若能減小var[-δθ˙],則δΦ?將緩慢變小。基于該原理,將式(9)改為

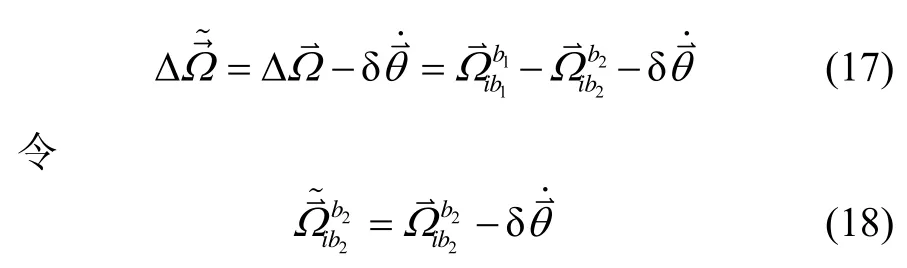
由于動(dòng)態(tài)撓曲變形是隨著(或)變化而變化的,因此動(dòng)態(tài)撓曲變形關(guān)聯(lián)項(xiàng)的誤差可以構(gòu)建成的線性自回歸方程,此處稱為自適應(yīng)補(bǔ)償方程為

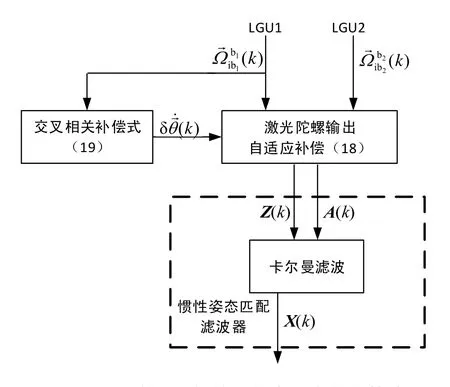
圖2 基于激光陀螺輸出的自適應(yīng)補(bǔ)償算法Fig.2 Adaptive compensation algorithm for gyroscope output
4 實(shí)驗(yàn)與驗(yàn)證
下面利用某實(shí)船的實(shí)測(cè)數(shù)據(jù)對(duì)激光陀螺輸出自適應(yīng)補(bǔ)償方法的有效性進(jìn)行驗(yàn)證。船體變形的“參考值”由高精度慣導(dǎo)系統(tǒng)測(cè)量得到,“估計(jì)值”為激光陀螺慣性姿態(tài)匹配測(cè)量的最優(yōu)估計(jì)值。
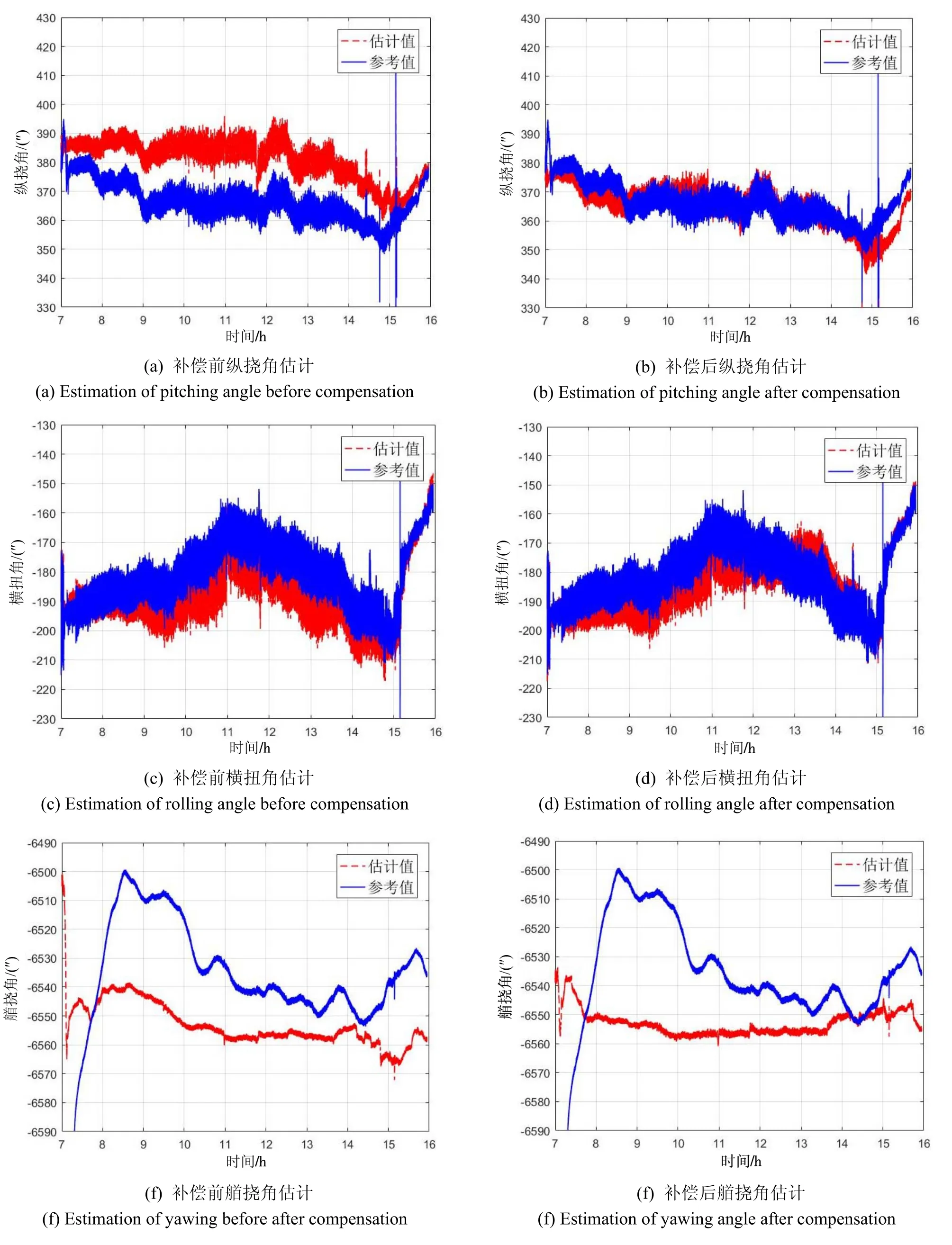
圖3 激光陀螺輸出自適應(yīng)補(bǔ)償前后的船體變形估計(jì)結(jié)果對(duì)比Fig.3 Comparison on actual measurement results of angular deformation after adaptive compensation for laser gyroscopes’ outputs
結(jié)果表明:未補(bǔ)償前,計(jì)算得到的船體變形角估計(jì)值存在明顯偏置誤差,其中俯仰角的偏置誤差均方根約為10″,橫扭角的偏置誤差均方根約為5″,艏撓角的偏置誤差均方根約為15″,三個(gè)方向綜合的偏置誤差均方根約為13″;補(bǔ)償后,三個(gè)方向的偏置誤差均方根約為5″,三個(gè)方向綜合的偏置誤差均方根約為8″。補(bǔ)償后的偏置誤差比補(bǔ)償前的降低約5″,表明該補(bǔ)償方法是有效的。
5 結(jié) 論
通過(guò)對(duì)慣性姿態(tài)匹配測(cè)量方程進(jìn)行誤差分析,推導(dǎo)得到了動(dòng)態(tài)撓曲變形誤差與慣性姿態(tài)角之間耦合作用的誤差方程,分析出兩者的交叉相關(guān)性導(dǎo)致了長(zhǎng)期變形角的估計(jì)方差存在上限值,并結(jié)合最優(yōu)濾波器結(jié)構(gòu)指出,長(zhǎng)期變形角的觀測(cè)度始終不大于動(dòng)態(tài)撓曲變形的觀測(cè)度,即動(dòng)態(tài)撓曲變形的測(cè)量精度要高于長(zhǎng)期變形。為了提高長(zhǎng)期變形的測(cè)量精度(或觀測(cè)度),必須增加先驗(yàn)信息,因此基于耦合作用方程提出了基于激光陀螺輸出的自適應(yīng)補(bǔ)償方法。該方法通過(guò)對(duì)陀螺敏感輸出的角位移進(jìn)行自適應(yīng)補(bǔ)償,達(dá)到抑制偏置誤差的目的,提高船體變形的估計(jì)精度。
實(shí)驗(yàn)結(jié)果表明,該補(bǔ)償方法可以有效地降低長(zhǎng)期變形的偏置誤差,進(jìn)一步完善了慣性姿態(tài)匹配測(cè)量方法的算法結(jié)構(gòu),使其具有更強(qiáng)的工程實(shí)用性;說(shuō)明了通過(guò)提供給最優(yōu)濾波器可靠的先驗(yàn)信息,可以進(jìn)一步提高觀測(cè)度低的狀態(tài)分量的估計(jì)精度,為進(jìn)一步優(yōu)化最優(yōu)估計(jì)濾波器的結(jié)構(gòu)和參數(shù)提供了理論指導(dǎo)。
(References):
[1] Dai Hong-De, Liu Ai-Li, Lu Jian-Hua. Deformation analysis and IMU-based real-time measuring method for big ship sailing in wave[J]. Journal of Chinese Inertial Technology, 2014, 22(3): 327-332.
[2] 汪順亭, 汪湛清, 朱昀炤, 等. 船體變形的監(jiān)測(cè)方法及其對(duì)航向姿態(tài)信息的修正[J]. 中國(guó)慣性技術(shù)學(xué)報(bào), 2007, 15(6): 635-641. Wang Shun-ting, Wang Zhan-qing, Zhu Yun-zhao, et al. monitoring on ship hull deformation and correction for heading & attitude information[J]. Journal of Chinese Inertial Technology, 2007, 15(6): 635-641.
[3] Mochalov A V, Kazantsev A V. Use of ring laser units for measurement of the moving object deformations[C]// Proceeding of SPIE 4680: Second International Conference on Lasers for Measurement and Information Transfer. St Petersburg, Russia, 2002: 85-92.
[4] Pehlivanoglu A G, Ercan Y. Investigation of flexure effect on transfer alignment performance[J]. The Journal of Navigation, 2013, 66(1): 1-15.
[5] 鄭佳興, 秦石喬, 王省書(shū), 等. 考慮準(zhǔn)靜態(tài)緩變量的船體角形變測(cè)量[J]. 中國(guó)慣性技術(shù)學(xué)報(bào), 2011, 19(1): 6-10. Zheng Jia-xing, Qin Shi-qiao, Wang Xing-shu. Ship hull angular deformation measurement taking slow-varying quasi-static component into account[J]. Journal of Chinese Inertial Technology, 2011, 19(1): 6-10.
[6] 楊云濤, 王省書(shū), 吳偉, 等. 激光陀螺組合體自主測(cè)量船體角變形的最優(yōu)估計(jì)法[J]. 中國(guó)慣性技術(shù)學(xué)報(bào), 2014, 22(3): 284-287. Yang Yun-tao, Wang Xing-shu, Wu Wei, et al. Optimal estimation of ship angular deformation for autonomous measurement by LGU[J]. Journal of Chinese Inertial Technology, 2014, 22(3): 284-287.
[7] Wu Wei, Chen Sheng, Qin Shi-qiao. Online estimation of ship dynamic flexure model parameters for transfer alignment[J]. IEEE Transactions on Control Systems Technology, 2013, 21(5): 1666-1678.
[8] 楊云濤, 王省書(shū), 黃宗升, 等. 船體變形測(cè)量中激光陀螺零偏誤差的補(bǔ)償[J]. 儀器儀表學(xué)報(bào), 2014, 35(12): 2755-2761. Yang Yun-tao, Wang Xing-shu, Huang Zong-sheng, et al. Bias error compensation of laser gyroscopes for autonomous measurement of ship hull angular deformation[J]. Chinese Journal of Scientific Instrument, 2014, 35(12): 2755-2761.
[9] Yang Yun-tao, Wang Xing-shu, Huang Zong-sheng, et al. Observation coupling effect of attitude matching in transfer alignment for ship angular flexure measurement [C]//Proceedings of the 33rd. Chinese Control Conference. 2014: 7280-7285.
[10] Wu Wei, Chen Sheng, Qin Shi-qiao. Coupling influence of ship dynamic flexure on high accuracy transfer alignment[J]. International Journal of Modelling, Identification, and Control, 2013, 19(3): 224-234.
[11] Yang Yun-tao, Wang Xing-shu, Huang Zong-sheng, et al. Compensation for observed coupling effect in measuring angular deformation of ship hull by laser gyroscope units [J]. Journal of Chinese Inertial Technology, 2014, 22(5): 561-566.
[12] Tomas T, Ira D. Ship wake deformation in the surf zone analyzed by use of a time-frequency method[C]// Proceedings of the 25th International Ocean and Polar Engineering Conference. 2015: 394-399.
Ship hull angular measurement method based on adaptive compensation for laser gyroscope output
YANG Yun-tao, WU Wen-yuan, LV Hai-bin, LI Zhao-zhao
(College of Science, PLA University of Science and Technology, Nanjing 211101, China)
An optimal filter for inertial attitude matching measurement by laser gyroscopes is constructed to determine the ship hull angular deformation in real-time, which is based on state functions of long-term deformation, dynamic flexure and gyro’s bias error. In view of the bias error of long-term deformation estimation in real-time filtering, the error equation of inertial attitude matching measurement is derived, which denotes that the statistical cross-correlation coupling effect between dynamic flexure and inertial attitude angle fully accounts for the bias error of long-term deformation estimation. Then an adaptive compensation method for laser gyroscope’s output in optimal filter is introduced. Experiment results show that the angular deformation RMSEs in pitch, roll and azimuth directions are lower than 5″. This adaptive compensation method can effectively restrain the bias error and improve the engineering practicability in angular deformation measurement application.
ship hull angular deformation measurement; laser gyroscope; inertial attitude matching; adaptive compensation
U666.1
A
1005-6734(2017)02-0166-05
10.13695/j.cnki.12-1222/o3.2017.02.006
2017-01-11;
2017-03-20
國(guó)家自然科學(xué)基金項(xiàng)目(61275002)
楊云濤(1984—),男,博士,講師,從事光電儀器與測(cè)控技術(shù)研究。E-mail: legend08fda@126.com
聯(lián) 系 人:武文遠(yuǎn)(1963—),男,教授,碩士生導(dǎo)師。E-mail: wuwenyuan12@163.com
猜你喜歡
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通·3-4年級(jí)(2017年10期)2017-11-08 08:42:59
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
