變導(dǎo)程螺旋引緯機構(gòu)劍桿位移曲線的設(shè)計
2017-06-05 14:58:10孔佳元雷炳杰
紡織學(xué)報 2017年4期
關(guān)鍵詞:設(shè)計
張 雷, 孔佳元, 雷炳杰, 李 楊
(浙江理工大學(xué) 機械與自動控制學(xué)院, 浙江 杭州 310018)
變導(dǎo)程螺旋引緯機構(gòu)劍桿位移曲線的設(shè)計
張 雷, 孔佳元, 雷炳杰, 李 楊
(浙江理工大學(xué) 機械與自動控制學(xué)院, 浙江 杭州 310018)
為提高變導(dǎo)程螺旋引緯機構(gòu)的運動特性,基于一種變異梯形加速度運動規(guī)律設(shè)計出引緯機構(gòu)運動曲線。根據(jù)實際引緯工況和加速度曲線各分界點的邊界條件構(gòu)建方程組,依據(jù)經(jīng)驗值確定方程組中變量的合理范圍,然后通過編寫的MatLab算法對方程組進行計算求解,通過綜合考慮加速度峰值、速度峰值和緯紗交接區(qū)域的臨界點速度從解空間中找出最優(yōu)的目標(biāo)解。隨后將基于經(jīng)典梯形加速度曲線設(shè)計的運動規(guī)律與前面得到的最優(yōu)運動規(guī)律進行對比。研究結(jié)果表明:設(shè)計的最優(yōu)運動規(guī)律在緯紗交接區(qū)域的速度和加速度比采用經(jīng)典梯形加速度曲線設(shè)計的數(shù)據(jù)要顯著降低,使得劍桿在緯紗交接區(qū)域運行更加平穩(wěn)。
引緯機構(gòu); 梯形加速度曲線; 最優(yōu)目標(biāo)解; 劍桿; 位移曲線
目前市場上主流的劍桿織機按照引緯方式可大體分為3種[1]:1) 共軛凸輪引緯機構(gòu),以意大利的SM系列劍桿織機為代表;2) 變導(dǎo)程螺旋推進式引緯機構(gòu),以意大利的Leonardo系列為代表;3) 空間四連桿引緯機構(gòu),如比利時的GTM系列。采用變導(dǎo)程螺旋引緯機構(gòu)的機型具有傳動鏈短,沒有中間齒輪,結(jié)構(gòu)緊湊,運動精確,占地面積小的優(yōu)點;國外學(xué)者對其中的核心部件變導(dǎo)程螺旋傳動機構(gòu)已經(jīng)有了相當(dāng)多的研究[2-4],但該種類型的中高檔劍桿織機在國內(nèi)還沒有完全自主研發(fā)制造。隨著國內(nèi)數(shù)控加工技術(shù)的進步,已可生產(chǎn)出符合特殊要求的變導(dǎo)程螺桿。變導(dǎo)程螺旋引緯機構(gòu)理論上是通過設(shè)計螺桿螺旋線使劍桿進入緯紗交接區(qū)域時速度降低,并緩慢減小為0,且在緯紗交接時刻的加速度值也減小到0,這樣更有利于緯紗的平穩(wěn)交接。為求出變導(dǎo)程螺旋線方程,需要先根據(jù)引緯條件設(shè)計出相應(yīng)的劍桿位移曲線。
常用的加速度運動規(guī)律有純?nèi)呛瘮?shù)分段組合、三角函數(shù)與直線組合、修正梯形加速度、修正正弦加速度組合等。孟建軍[5]采用模糊綜合評價的方法對各種可能的凸輪運動曲線進行綜合評價,證明了修正正弦曲線具有很強的通用性和穩(wěn)定性。文獻[6]指出在動程和運動時間相同的條件下,正弦加速度規(guī)律的加速度峰值比修正梯形加速度規(guī)律的加速度峰值高45%,速度峰值高4%。陳普生等[7]驗證了采用多項式曲線為過渡段的修正梯形規(guī)律的躍度峰值比三角函數(shù)做過渡段的修正梯形規(guī)律的峰值高17%,但并無突變,不會引起機構(gòu)的慣性沖擊。周香琴[8]則引進了一種引緯曲線設(shè)計的簡便方法,避開傳統(tǒng)方法中先求解出加速度曲線再依次積分得到速度曲線和位移曲線的繁瑣。楊玉虎等[9]以套筒滾子鏈為研究對象,分別分析了以修正正弦、修正等速等多種不同運動規(guī)律實現(xiàn)間歇傳動時的系統(tǒng)加速度響應(yīng)發(fā)現(xiàn),躍度連續(xù)的曲線具有較小的殘余振動,運動性能相對較好。
在以前研究的基礎(chǔ)之上,本文基于一種變異梯形加速度曲線來模式化設(shè)計求解劍桿位移曲線。設(shè)計出理想的劍桿位移曲線,可使劍桿進入緯紗交接區(qū)域內(nèi)的加速度值相比經(jīng)典梯形加速度設(shè)計的值要進一步降低。為此,首先進行了設(shè)計思路的理論推導(dǎo),然后根據(jù)實際引緯的工況條件通過實例計算來具體分析設(shè)計。由于本文中設(shè)計的位移曲線是多解選優(yōu)問題,在控制其他變量不變的情況下,需在解空間中選取一組解,先定性研究以劍桿在緯紗交接時刻加速度為0,得到運動規(guī)律的加速度峰值相比于這組解中其他條件下對應(yīng)得到的加速度峰值的變化。隨后探究解空間中以劍桿在緯紗交接時刻加速度為0這一條件得到的所有解之間的聯(lián)系,綜合考慮速度峰值、劍桿剛進入緯紗交接區(qū)域時的速度和加速度峰值,選取最優(yōu)目標(biāo)解。
1 變導(dǎo)程螺旋引緯機構(gòu)簡介
變導(dǎo)程螺旋引緯機構(gòu)簡圖如圖1所示。該機構(gòu)由曲柄滑塊機構(gòu)和螺旋副機構(gòu)組成。曲柄輪旋轉(zhuǎn)時,由曲柄AB通過連桿BC傳動螺母套殼C,套殼C沿不等距螺桿的軸心線做平滑移動,因此與之相嚙合的螺桿產(chǎn)生旋轉(zhuǎn)運動。螺母套殼做往復(fù)移動,螺桿即正反旋轉(zhuǎn)。螺桿末端裝有劍帶輪D,劍帶輪D的正反回轉(zhuǎn)使撓性劍桿產(chǎn)生引緯動作。劍桿動程大小可通過調(diào)節(jié)曲柄AB的長度來達到,其中驅(qū)動劍帶輪正反轉(zhuǎn)的螺桿與滑塊間的間隙可調(diào)節(jié)到零,螺桿壽命極長。螺旋副的傳動效率較低,所以將滑塊螺母設(shè)計成滾動摩擦, 并輔以油浴潤滑,以彌補此缺陷[10]。螺母內(nèi)有2對滾子與螺桿的螺旋面相嚙合,形成螺旋副。
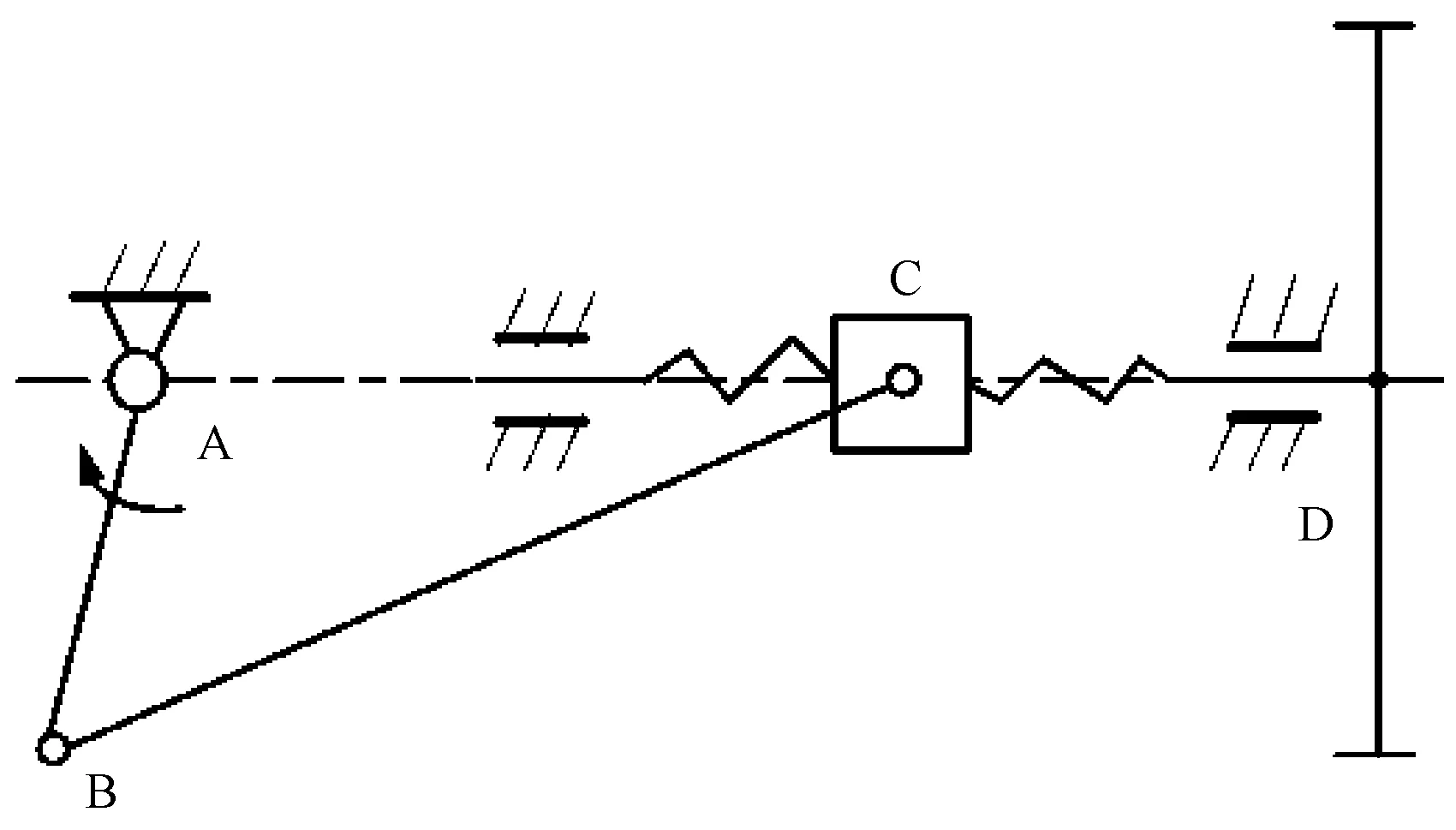
圖1 變導(dǎo)程螺旋引緯機構(gòu)簡圖Fig.1 Sketch of variable lead screw weft insertion mechanism
2 劍桿位移曲線的模式化設(shè)計
2.1 設(shè)計思路
對于高速運轉(zhuǎn)的劍桿織機,要求機構(gòu)運動時的躍度和跳度光滑連續(xù)無突變,不至于產(chǎn)生較大的慣性沖擊和振動[11]。本文在修正梯形加速度運動規(guī)律的基礎(chǔ)上,為進一步降低劍桿在緯紗交接時間段的加速度值,基于變異梯形加速度曲線對劍桿的位移曲線進行設(shè)計,結(jié)果如圖2所示。從圖中可看出,變異梯形加速度曲線由6段兩端導(dǎo)數(shù)為0的多項式曲線和4段曲率為0的線段組成。其中:x0~x10分別為加速度曲線的各節(jié)點位置;橫坐標(biāo)θ為曲柄位置角;縱坐標(biāo)a(θ)表示在曲柄位置角為θ時的劍桿加速度;曲柄轉(zhuǎn)速為w,(°)/s;a1、a2、a3為待求常系數(shù)。
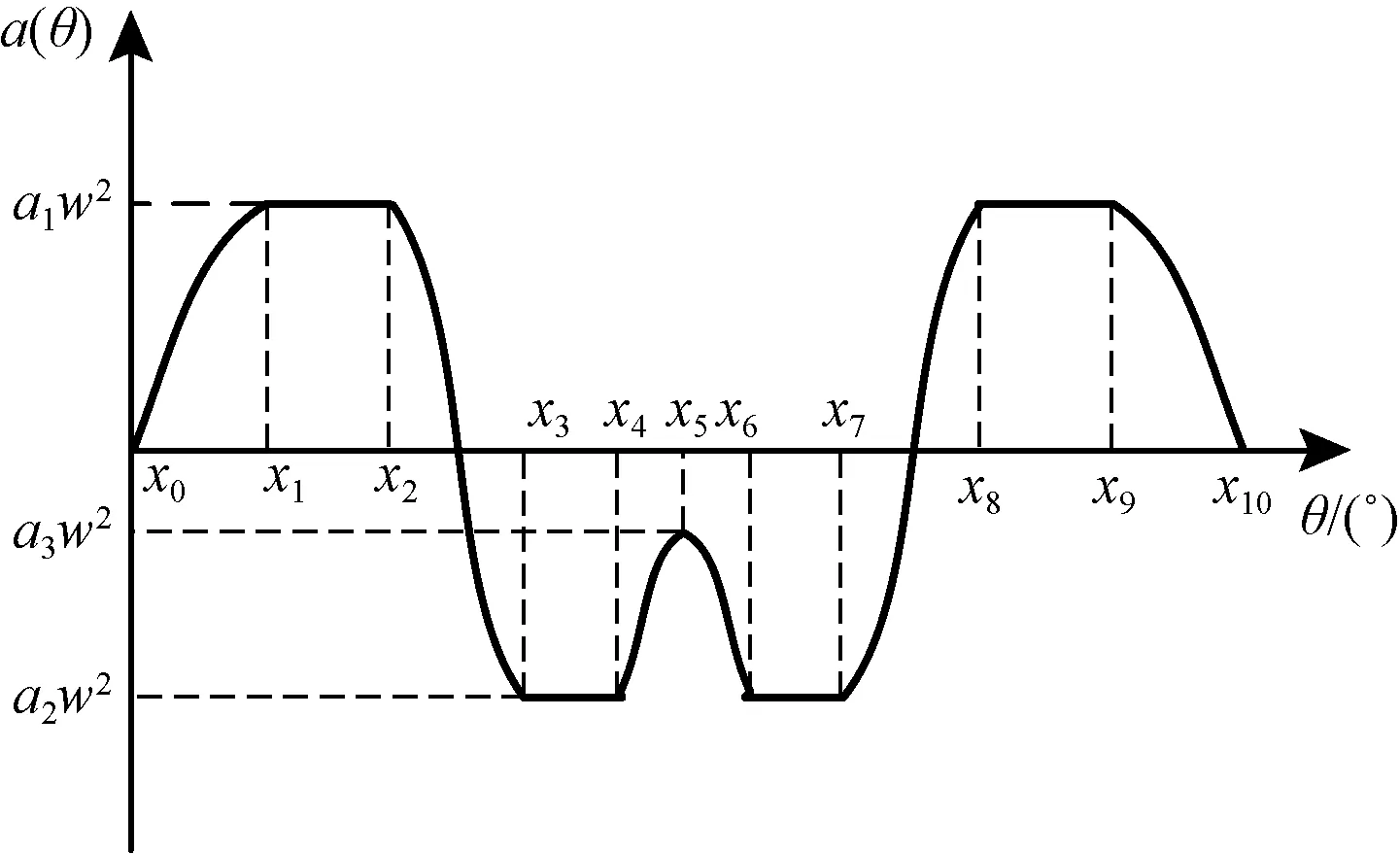
注:a1w2為劍桿運動正向加速時的最大加速度值;a2w2為劍桿反向加速度峰值;a3w2為劍桿在緯紗交接時刻的加速度值。圖2 變異梯形加速度曲線簡圖Fig.2 Sketch of transformed trapezoidal acceleration curve
曲柄轉(zhuǎn)過一周,劍桿往返一個來回。在一個周期內(nèi)先假設(shè)好各區(qū)間段上的位移函數(shù):
(1)
其中已知x10=360°,x0=0,x5=180°。
又有:
(2)
(3)
式中:θ為曲柄位置角;s(θ)為劍桿位移關(guān)于θ的函數(shù);s1到s10為s(θ)的分段曲線;f1(θ)到f10(θ)為相應(yīng)分段曲線上劍桿位移關(guān)于θ的函數(shù);v(θ)為劍桿速度關(guān)于θ的函數(shù);a(θ)為劍桿加速度關(guān)于θ的函數(shù)。
在假定x0~x10、a1、a2、a3都是已知的情況下,根據(jù)加速度、速度、位移連續(xù)光滑的條件對s1段列出邊界條件:
(4)
6個方程可確定一個五次多項式,令f1(θ)=a1θ5+b1θ4+c1θ3+d1θ2+e1θ+f1則可求解出唯一的一組多項式系數(shù),得到f1(θ)。
同理對s2段列出邊界條件:
(5)
s2段的加速度曲線是一個曲率為0的線段,令f2(θ)=m2θ2+n2θ+l2,其中m2,n2,l2為多項式待求系數(shù)。前一步已經(jīng)求解得到了f1(θ),結(jié)合邊界條件可確定m2、n2、l2,得到f2(θ)。依次對s3、s4和s5段列出邊界條件如式(6)~(8):
(6)
(7)
(8)
同理可唯一地確定相應(yīng)各段的位移曲線方程f3(θ)、f4(θ)、f5(θ)。根據(jù)對稱性得到s6、s7、s8、s9、s10段的位移曲線方程:
(9)
觀察式(4)、(6)和(8)可將方程組建立形式相同的矩陣表達式,結(jié)合MatLab求解相應(yīng)的方程解。建立如下的矩陣方程:
Ai·x=pi(i=0,2,4)
(10)
式中:x=[abcdef]T;pi為式(4)、(6)、(8)對應(yīng)方程組的常數(shù)項。
初始值p0=[0 0 0 0 a10]T
為方程式(5)和(7)建立統(tǒng)一矩陣表達式:
Bj·y=qj(j=1,3)
(11)
式中:

結(jié)合式(10)和(11),通過MatLab編寫的算法程序運算,可得到各分段的位移曲線方程符號解。根據(jù)實際引緯要求,先確定x1、x2、a2的值。由于劍桿開始退劍(θ=180°)時的瞬時速度為0,所以在θ∈[0,180°]內(nèi),加速度曲線與水平軸圍成的正負(fù)面積之和應(yīng)為0,得到:
(12)
將前面已經(jīng)得到的方程符號解和已知變量代入,進一步得到:
F(x3,x4,a1,a3)=0
(13)
根據(jù)劍桿在x5=180°處取得單邊劍頭最大動程sm:
f5(a1,a3,x3,x4)=sm
(14)
根據(jù)經(jīng)驗值限定x3、x4的合理區(qū)間,聯(lián)立式(13)和(14)求解方程組的解空間。綜合考慮加速度峰值、速度峰值和劍桿在交接區(qū)域的速度等因素,在解空間中選取最優(yōu)解。
2.2 工程實例分析設(shè)計
以某型號的引緯織機的數(shù)據(jù)為例,筘幅為 1 900 cm時車速可達560 r/min,送緯劍與接緯劍的交接時刻主軸位置角差值為10°,接緯劍進梭口的位置角為53°[1]。筘幅為1 900 mm,則單邊劍頭的最大動程sm大約為1 200mm。為獲得良好的動力性能,在設(shè)計加速度時應(yīng)使得劍桿運行過程中正負(fù)加速度峰值盡量接近,這里令a2=-a1。在x2、x3、x4、x5、a1、a2不變的情況下,x1的值越大,則相應(yīng)的幅外空程(進入梭口前劍頭的行程)越小。幅外空程的大小影響劍頭進入梭口和退出梭口時的位置角和梭口高度,需要適當(dāng)選擇。通常幅外空程位置角在30°~40°之間,這里取下限,則x1=30°。進劍期間(包含在x1~x2段中)的加速度保持平穩(wěn),參考機型的接緯劍進劍位置角為53°。通常x2對應(yīng)的位置角在70°~90°之間[12]。考慮到本文取用的變異梯形加速度曲線在水平軸下方的運行時間大于梯形加速度曲線情況下的時間,這里取x2=75°。一般情況下x3處的位置角在110°~130°左右。
先定x3=110°,將確定的分界點值輸入到MatLab程序中,限定x4∈[110°,170°],以5°為增量循環(huán)代入求解相應(yīng)的a1、a3。求解結(jié)果如表1所示。
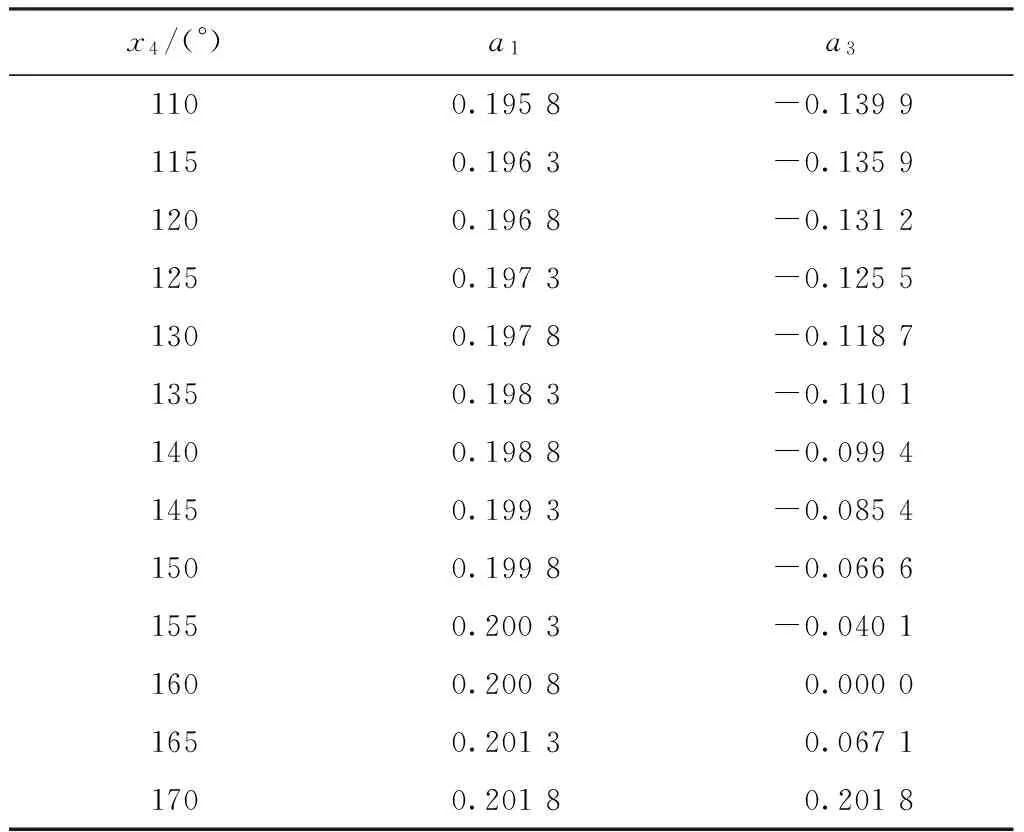
表1 限定x3=110°時的計算結(jié)果Tab.1 Calculation result for x3=110°
從表中可看出,在其他變量不變的情況下,隨著x4的增大,相應(yīng)的a1也小幅度增大,a3的絕對值大小則出現(xiàn)先減小后增大的情況(a3>0段,隨著x4的小幅增大,a3急劇增大)。原先設(shè)定的加速度曲線中a3≤0,這里只研究小于或等于0的情況。根據(jù)表1,在以5°為增量的第1次計算中,在x4=160°時的a1僅比在110°時的最小值增大了2.6%左右,而a3的絕對值減小到了0。以a3的絕對值取得最小值(a1,a3)作為最優(yōu)組合,得到了在x3=110°時的a1,a3的最優(yōu)組合。上面的計算求解結(jié)果是建立在x3=110°的基礎(chǔ)上進行的,通過對表1得到的數(shù)據(jù)分析可知,在x3=110°的情況下可實現(xiàn)以a1很小幅度的增大來取得a3=0這一理想狀態(tài)。綜合考慮速度和加速度,研究能否以速度峰值vm小幅增加來換取加速度峰值較大幅度降低的效果。分析x3∈[110°,122°]的細分情況,以2°為間隔,同理分別直接求解各組的(a1,a3)最優(yōu)組合。考慮到送緯劍與接緯劍的交接時刻主軸位置角差值為10°,將vθ=175°(送緯劍剛進入交接區(qū)域時的速度)也作為性能指標(biāo),其他參數(shù)不變。運算結(jié)果如表2所示。
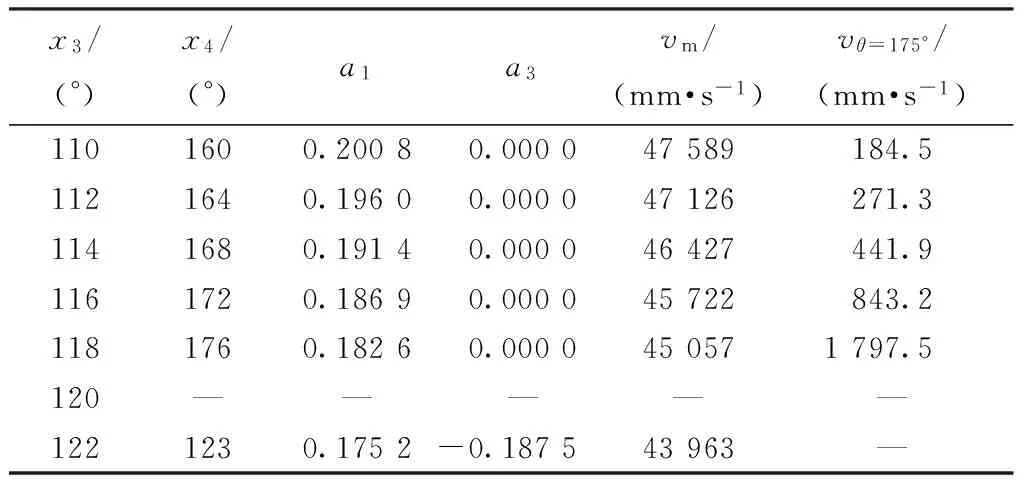
表2 x3∈[110°,122°]時各組最優(yōu)解的計算數(shù)據(jù)Tab.2 Calculation result of every optimal solution for x3∈[110°,122°]
表2中x3=120°時,由式(13)可得a3=-a1,與x4的取值無關(guān),此時沒有最優(yōu)組合。從表中數(shù)據(jù)可看出,每組x3對應(yīng)的最優(yōu)組合中的a1和速度峰值vm隨著x3的增大而減小,但對應(yīng)的送緯劍進入交接重疊區(qū)域臨界點的速度大幅度增大。同時以x3=120°為分界點,x3的進一步增大并不能設(shè)計出理想的最優(yōu)組合。最終設(shè)計參數(shù)選取如:x1=30°;x2=75°;x3=110°;x4=160°;x5=180°;a1=0.200 8;a2=-0.200 8;a3=0。得到劍桿運動規(guī)律①。將劍桿的位移、速度、加速度曲線進行歸一化處理,結(jié)果如圖3所示。
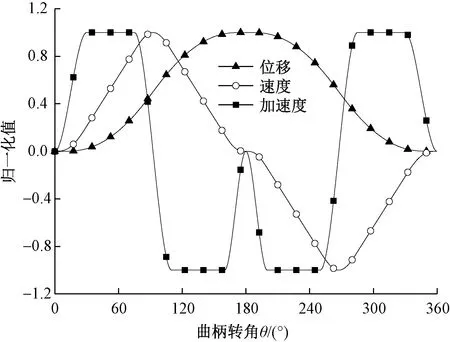
圖3 運動規(guī)律①歸一化后的位移、速度和加速度曲線Fig.3 Normalized curve of displacement, velocity and acceleration for motion law①
同樣根據(jù)上面的設(shè)計思路,基于經(jīng)典梯形加速度曲線得到運動規(guī)律②。將其位移、速度和加速度曲線進行歸一化處理,結(jié)果如圖4所示。對比圖3和圖4可看出,基于變異梯形加速度曲線設(shè)計的運動規(guī)律①在θ位于175°~185°之間的緯紗交接區(qū)域速度更加平穩(wěn),且劍桿在緯紗交接區(qū)域的加速度值也顯著降低,減小了在交接區(qū)域的慣性力。進一步定量地對比運動規(guī)律①與運動規(guī)律②的關(guān)鍵性能指標(biāo),結(jié)果如表3所示。從表3中數(shù)據(jù)可看出,運動規(guī)律①中的加速度峰值和速度峰值較運動規(guī)律②中的有小幅增大,但劍桿進入交接區(qū)域時的速度和加速度大幅度降低。
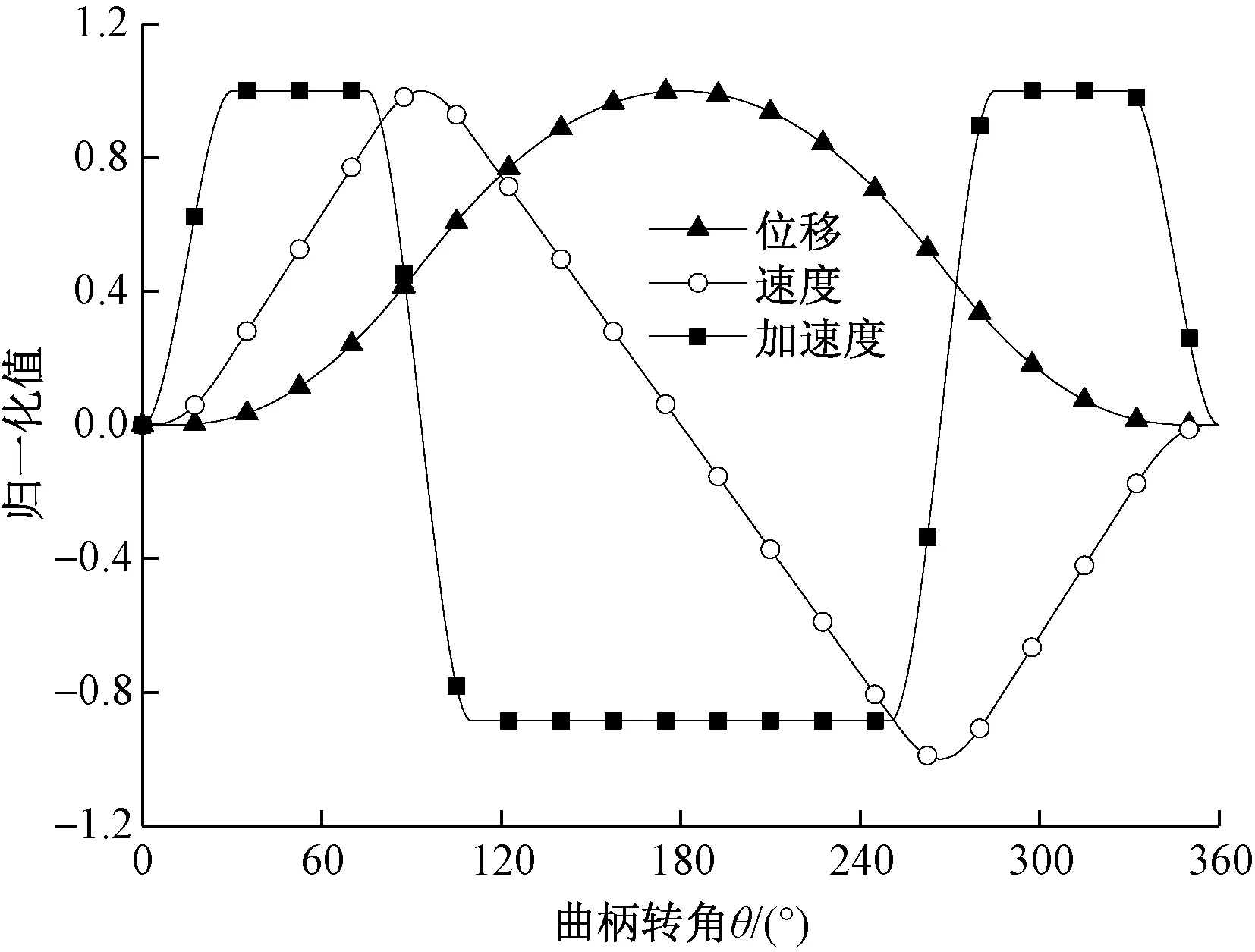
圖4 運動規(guī)律②歸一化后的位移、速度和加速度曲線Fig.4 Normalizedcurve of displacement, velocity and acceleration for motion law②
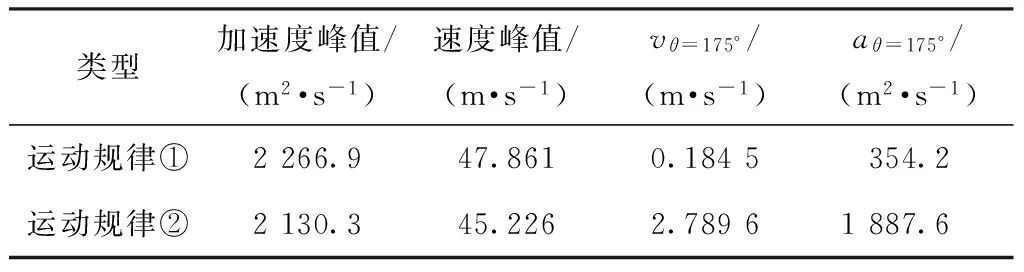
類型加速度峰值/(m2·s-1)速度峰值/(m·s-1)vθ=175°/(m·s-1)aθ=175°/(m2·s-1)運動規(guī)律①2266.947.8610.1845354.2運動規(guī)律②2130.345.2262.78961887.6
3 結(jié) 論
1)在控制其他變量不變的情況下,在解空間中先選取一組解,通過定性地研究發(fā)現(xiàn):以劍桿在緯紗交接時刻加速度為0的條件得到運動規(guī)律的加速度峰值相比于這組解中其他條件下對應(yīng)的加速度峰值幅度增大很小。為直接研究解空間中以劍桿在緯紗交接時刻加速度為0這一條件限定的解提供了數(shù)據(jù)支撐。
2)解空間中以交接時刻加速度為0為條件的所有目標(biāo)解的速度峰值與加速度峰值正向相關(guān),但對應(yīng)的剛進入緯紗交接區(qū)域時的劍桿速度卻隨著對應(yīng)的加速度峰值的小幅度增加而顯著地減小。綜合考慮速度峰值、加速度峰值和劍桿剛進入緯紗交接區(qū)域時的速度,選取了最優(yōu)運動規(guī)律。
3)基于變異梯形加速度曲線設(shè)計出的最優(yōu)運動規(guī)律①,基于經(jīng)典梯形加速度曲線設(shè)計得到運動規(guī)律②。運動規(guī)律①相比于運動規(guī)律②:劍桿的加速度峰值和速度峰值小幅增加,但進入緯紗交接區(qū)域內(nèi)的劍桿速度顯著降低并緩慢減小到0,且在緯紗交接時刻劍桿加速度能夠減小到0,降低了劍桿在交接區(qū)域的慣性力與飄動,有利于緯紗更加平穩(wěn)的交接。
4)本文設(shè)計出的劍桿位移曲線為后續(xù)的變導(dǎo)程螺桿螺旋線的反求和變導(dǎo)程螺旋引緯機構(gòu)的優(yōu)化設(shè)計提供了前提條件。
FZXB
[1] 王鴻博. 劍桿織機實用技術(shù)[M]. 北京:中國紡織出版社,2006: 14-29. WANG Hongbo. Practical Technology of Rapier Loom[M]. Beijing: China Textile & Apparel Press, 2006:14-29.
[2] VAHID O, ESLAMINASAB N, GOLNARAGHI M F. Friction-induced vibration in lead screw systems: Mathematical modeling and experimental studies[J]. Journal of Vibration and Acoustics, DOI:10.1115/1.3025837.
[3] CHINEDUM Eokwudire. Improved screw-nut interface model for high-performance ball screw drives[J]. Journal of Mechanical Design, DOI:10.1115/1.4004000.
[4] ZOTOVB N. Comparison of computed and experimental characteristics of a variable-lead screw[J]. Chemical and Petroleum Engineering,2015,51(3/4):268-271.
[5] 孟建軍. 高速經(jīng)編機凸輪從動件運動規(guī)律的模糊綜合[J]. 紡織學(xué)報,2008,29(12):100-102. MENG Jianjun. Fuzzy comprehensive assessment of cam moving rule in high speed warp knitting machine[J]. Journal of Textile Research, 2008, 29(12):100-102.
[6] 郭宏亮,王青,葉國銘. 修正梯形加速度運動規(guī)律中過渡曲線的設(shè)計[J]. 紡織學(xué)報,2007,28(8):100-101,109. GUO Hongliang, WANG Qing, YE Guoming. Design of transitional curve of modified trapezoid acceleration motion[J]. Journal of Textile Research, 2007, 28(8): 100-101,109.
[7] 陳普生,何敏英. 動態(tài)綜合時劍桿運動規(guī)律的選擇[J]. 中國紡織大學(xué)學(xué)報, 1987, 13(1):35-42. CHEN Pusheng, HE Minying. The choice of motion law in rapier′s dynamic synthesis[J]. Journal of China Textile University,1987,13(1):35-42.
[8] 周香琴. 設(shè)計引緯曲線的一種簡便方法[J]. 紡織學(xué)報, 2000, 21(1): 31-33. ZHOU Xiangqin. A simple method of weft insertion curve design[J]. Journal of Textile Research,2000,21(1):31-33.
[9] 楊玉虎, 劉曉玲, 張策, 等. 套筒滾子鏈的動力學(xué)建模研究[J]. 中國機械工程, 2005, 16(16):1474-1477. YANG Yuhu, LIU Xiaoling, ZHANG Ce, et al. Dynamic modeling study of bush roller chain[J]. Chinese Journal of Mechanical Engineering, 2005,16(16):1474-1477.
[10] 陳元甫. 劍桿織機原理與使用[M].北京:中國紡織出版社,2005:118-119. CHEN Yuanfu. Theory and Application of Rapier Loom[M]. Beijing: China Textile & Apparel Press,2005:118-119.
[11] 劉志海. 劍桿織機新型引緯機構(gòu)的設(shè)計與分析研究[D]. 南京:東南大學(xué),2004:1-52. LIU Zhihai. Design and analysis of new weft insertion mechanism in rapier loom[D]. Nanjing: Southeast University, 2004:1-52.
[12] 張振奇,王振喜,候文磊. 新型“螺旋漿”式傳劍裝置探討與設(shè)計[J]. 紡織機械,2013(1):24-27. ZHANG Zhenqi, WANG Zhenxi, HOU Wenlei. Study and design of new-type ″propeller″ rapier device[J]. Textile Machinery,2013(1):24-27.
Design of displacement diagram for rapier in variable lead screw weft insertion mechanism
ZHANG Lei, KONG Jiayuan, LEI Bingjie, LI Yang
(College of Mechanical Engineering & Automation, Zhejiang Sci-Tech University, Hangzhou, Zhejiang 310018, China)
In order to improve the motion characteristics of the variable lead screw weft insertion mechanism, the displacement curve of weft insertion mechanism was designed based on the transformed trapezoidal acceleration curve. Firstly, an equation set was built according to the actual working conditions of weft insertion and the boundary conditions of the cut-off points in the acceleration curve. Parts of the variables were determined based on the empirical data and the variables were limited in a reasonable range. Then the equation set could be solved by MatLab. The optimal objective solution was selected from the solution space under comprehensive consideration of the peak acceleration, the peak velocity and the velocity of the critical point in the weft transition area. Subsequently, a comparison between the designed optimal motion law with the one based on the classic trapezoidal acceleration curve was carried out. The result shows that when the rapier moves into the weft transition area, the velocity and the acceleration of the designed optimal motion law are significantly smaller than the ones based on the classic trapezoidal acceleration curve, so that the rapier operates more stably when in the weft transition area.
weft insertion mechanism; trapezoidal acceleration curve; optimal objective solution; rapier; displacement curve
10.13475/j.fzxb.20160405506
2016-04-20
2017-01-06
國家自然科學(xué)基金項目(51175475);浙江省自然科學(xué)基金項目(LY14E050027)
張雷(1974—),男,副教授,博士。主要研究方向為機器人和紡織機械。E-mail:lzhang@zstu.edu.cn。
TS 103.1
A
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
